无人机技术在复杂地形航道测绘中的应用
2020-04-01 18:32牙廷周
西部交通科技 2020年9期
关键词:无人机
牙廷周

摘要:为将无人机技术应用于复杂地形航道测绘工程中,文章基于无人机遥感技术,对无人机测量应用的优势及应用要点进行阐述,同时通过试验手段研究了控制点数量、飞行方案对无人机航道测绘精度的影响,并指出航道测绘精度随着控制点的增加呈现先提高后平稳的趋势。研究认为:当控制点个数达到17个时,随着控制点个数的提高,精度提高不明显,表明17个控制点为无人机航道测绘的最优控制点个数,最优飞行方案为折线飞行方案。所得结论可为无人机在航道测绘的广泛应用提供理论参考。
关键词:无人机;航道测绘;控制点个数;测绘精度;折线飞
0 引言
随着国内经济快速发展及对工程质量的追求,国内测绘技术得到了迅猛发展。无人机技术也逐渐被广泛应用于测绘工程实践当中[1]。无人机主要通过不载人飞机的形式,由无线电遥控设备来进行控制,经由导航系统、数据传输系统等控制装置,将无人机拍摄的影像用于加工、控制及处理[2-3]。无人机技术可实现数据集的可视化,是一种数据与计算机相结合的先进装置,具有灵活性高、准确率高、效率高等优点[4]。近年来航运业快速发展,对航道质量的要求日益提高,航道建设的任务量增加使得在航道测绘方面的要求逐渐提高,需采用先进的技术提高精度[5]。因此如何将无人机技术应用于复杂地形航道测绘中值得深入研究。
1 无人机技术在航道测绘中的优势
无人机技术应用于航道测绘中,具备很大的优势:
(1)信息采集系统高效快捷。无人机技术在航道测绘中的优势主要表现在便捷性、高效性、全面性等方面,其实际操作简单,在航道周围复杂地形中可进行连续作业,其数据采集系统可实时获取高精度影像数据,对局部信息的采集效率极高。
(2)监测尺度明显高于传统方法。无人机技术可根据实际需求进行现场调控监测尺度,可同時监测不同范围内的物体,运用三维测量模式对目标现场情况进行测量,并及时获取目标信息。
(3)信息处理速度高。无人机技术可以将航道测绘得到的数据及时反馈到专门的信息处理系统中,做到及时监测及时处理,大幅度提高信息处理的质量和速度。
2 无人机技术在航道测绘中的应用
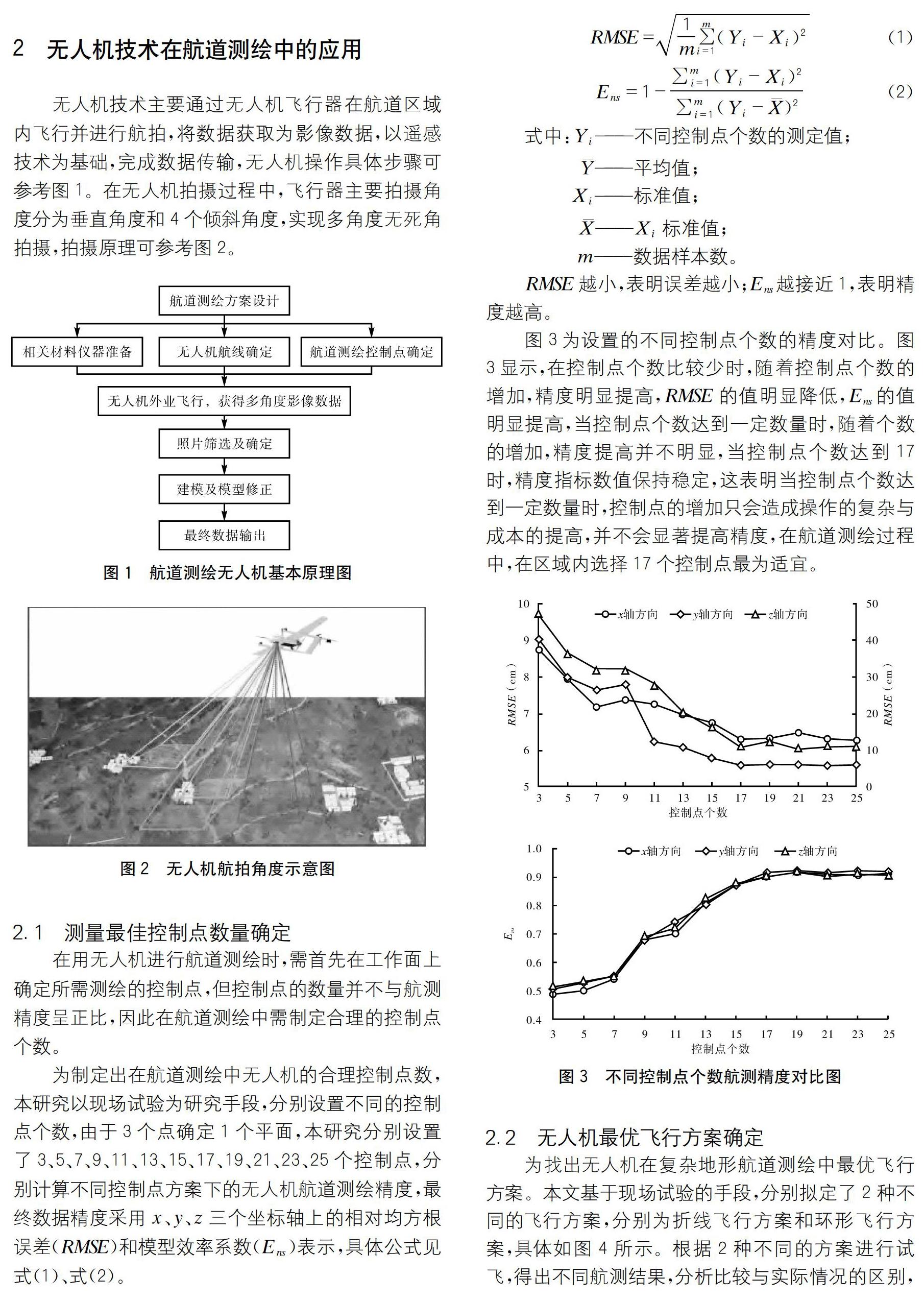
无人机技术主要通过无人机飞行器在航道区域内飞行并进行航拍,将数据获取为影像数据,以遥感技术为基础,完成数据传输,无人机操作具体步骤可参考图1。在无人机拍摄过程中,飞行器主要拍摄角度分为垂直角度和4个倾斜角度,实现多角度无死角拍摄,拍摄原理可参考图2。
2.1 测量最佳控制点数量确定
在用无人机进行航道测绘时,需首先在工作面上确定所需测绘的控制点,但控制点的数量并不与航测精度呈正比,因此在航道测绘中需制定合理的控制点个数。
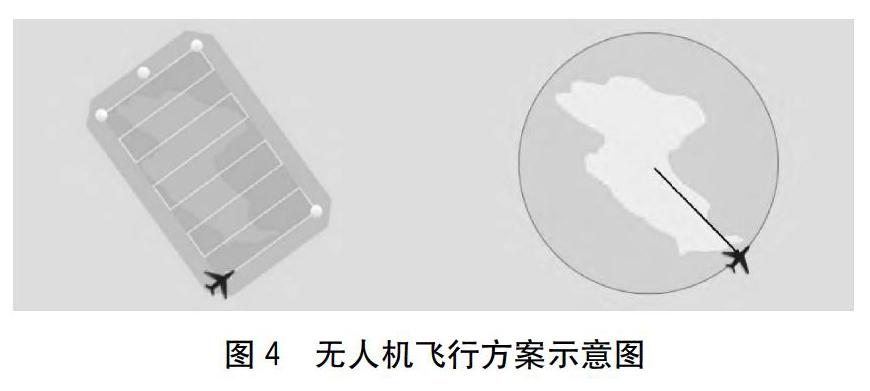
为制定出在航道测绘中无人机的合理控制点数,本研究以现场试验为研究手段,分别设置不同的控制点个数,由于3个点确定1个平面,本研究分别设置了3、5、7、9、11、13、15、17、19、21、23、25个控制点,分别计算不同控制点方案下的无人机航道测绘精度,最终数据精度采用x、y、z三个坐标轴上的相对均方根误差(RMSE)和模型效率系数(Ens)表示,具体公式见式(1)、式(2)。
图3为设置的不同控制点个数的精度对比。图3显示,在控制点个数比较少时,随着控制点个数的增加,精度明显提高,RMSE的值明显降低,Ens的值明显提高,当控制点个数达到一定数量时,随着个数的增加,精度提高并不明显,当控制点个数达到17时,精度指标数值保持稳定,这表明当控制点个数达到一定数量时,控制点的增加只会造成操作的复杂与成本的提高,并不会显著提高精度,在航道测绘过程中,在区域内选择17个控制点最为适宜。
2.2 无人机最优飞行方案确定
为找出无人机在复杂地形航道测绘中最优飞行方案。本文基于现场试验的手段,分别拟定了2种不同的飞行方案,分别为折线飞行方案和环形飞行方案,具体如图4所示。根据2种不同的方案进行试飞,得出不同航测结果,分析比较与实际情况的区别,得出最优飞行方案。
表1为不同飞行方案下测得的控制点经纬度及海拔与实际值的对比。由表1可以看出,不同方案下的测定结果有所不同,其中折线方案的测定结果普遍低于实际值,而环形方案的测定结果普遍高于实际值,同时折线方案的精度要明显高于环形方案,折线方案测定的控制点经度与实测值的误差为0.009%~0.057%,环形方案为0.057%~0.38%,折线方案测定的控制点纬度与实测值的误差为0.086%~0.257%,环形方案为2.511%~6.271%,折线方案测定的控制点海拔与实测值的误差为0~0.059%,环形方案为0.039%~0.412%,因此折线方案为无人机飞行的最优方案。
2.3 无人机测绘步骤
2.3.1 获得测量影像资料
在进行航道测绘的过程中,测绘人员需针对现场实际情况,合理确定无人机的飞行区域及飞行路线,同时在正式航测之前需进行一定的试飞操作。为避免由于无人机飞行过程中飞行幅度造成影像的偏角,在进行所需数据必要测定的同时,仍需在飞行过程中进行多数据拍摄,以丰富数据,便于后期对影像修正。飞行结束后,针对重点区域,确保影像的准确性。
由本文研究可知,在制定无人机飞行方案及控制点数量时,应选择折线飞行方案,控制点数量应定为17个,这样可以保证无人机测绘的最高精度。
2.3.2 采集数据,生成矢量化数据
无人机采集复杂地形航道数据时,一般采取自动加密数据采集的方式,该方式主要是在对数据和信息进行收集的基础上,采用拍摄设备和传感器来暂存采集数据,并及时加密,是一种内部控制系统的自我保护机制,得出的数据更加有效、准确。
在获得影像资料之后,需对影像数据进行矢量化处理,主要运行计算机软件将数据合成DMS数据格式,通过对航道地形、坡度等因素的拍摄,对航道基本特征进行统计,明确最终航道走向、地形、坡度等要素,使得最终数据可真实反映航道的实际情况。
2.3.3 获取特殊目标
在测量中,存在许多信息数据获取难度比较大的特殊测绘目标,比如大型工程项目、军事或文物建筑等。采用传统测量方法或技术来对这些特殊测绘目标进行测量就会难以准确、全面地获取相应的资料和数据,这时候灵活地运用无人机遥感技术,就能确保测量位置的准确性,提高影像资料获取的精准度,提高测绘工程测量成图的制作质量和效率,具有很强的应用价值。对航道周围的标志性建筑物等的测绘,存在获取难度较大的可能,需采用传统的测量技术对特殊目标进行重新校对,以获得全面的航道测绘信息。
3 结语
无人机技术应用于航道测绘工程中,具有效率高、准确度高等优点,在实际应用中应根据实际情况选择合理的控制点个数及飞行器航线,以确保无人机在航道测绘中的应用质量。本文分析研究了无人机在航测测绘过程中的最优控制点个数及最优飞行方案,指出最优控制点个数为17个,最优飞行方案为折线飞行方案,同时根据上述试验结果,拟定了无人机航道测绘的具体步骤,本文结论可为无人机在航道测绘中的应用提供科学支撑。
参考文献:
[1]李 涛.天狼星无人机航摄系统在复杂地形测量中的应用与精度分析[J].测绘通报,2017(12):146-152.
[2]吕一伟.对无人机测绘数据处理关键技术及应用的探究[J].科技创新与应用,2018(7):87-93.
[3]王敬泉,孙 琦,王春光.无人机测绘数据处理关键技术及应用探究[J].工程建设与设计,2018(22):266-267.
[4]陈晓龙,陈显龙,彭瑶瑶.无人机影像处理关键技术研究[J].北京测绘,2016(3):24-27.
[5]石硕崇,库安邦,明平寿.航道测绘现状及发展[J].测绘与空间地理信息,2018,41(11):236-237,241,244.
收稿日期:2020-05-27
猜你喜欢
电脑知识与技术(2016年28期)2016-12-21
新教育时代·教师版(2016年27期)2016-12-06
农机使用与维修(2016年10期)2016-11-10
人间(2016年26期)2016-11-03
科技视界(2016年22期)2016-10-18
企业导报(2016年9期)2016-05-26