
移动机器人滑模路径的跟踪控制*
2020-03-20 03:05宁洪斌祝俊伟邓小飞陈善荣
吉首大学学报(自然科学版) 2020年1期
宁洪斌,祝俊伟,邓小飞,陈善荣,何 亮
(1.吉首大学信息科学与工程学院,湖南 吉首 416000;2.中国联合网络通信有限公司邵阳市分公司,湖南 邵阳 422000;3.国家电网湖南省电力有限公司湘西经济技术研究所,湖南 吉首 416000)
机器人诞生是20世纪科学技术的一大进步.近些年,机器人技术不断向智能化、多元化方向发展.移动机器人集成了传感器技术、机械技术和计算机技术,是机器人研究中的一个重要分支[1-2].由于移动机器人是一种高度复杂的非线性系统,导致获得高精度的移动机器跟踪结果十分困难,因此路径跟踪精度问题被广泛关注[3-9].21世纪以来,移动机器人已被广泛应用于各个领域,并仍具有广阔的研究和应用前景.为了增强移动机器人滑模路径跟踪控制的抗干扰能力,提升控制器的动态性能及路径跟踪精度,在前人研究成果的基础之上,笔者提出了一种基于有界输入的滑模路径跟踪算法.改进的滑模控制器具有更高的跟踪精度和更好的跟踪效果,且保证了移动机器人的全局渐近稳定路径跟踪控制.
1 移动机器人的模型
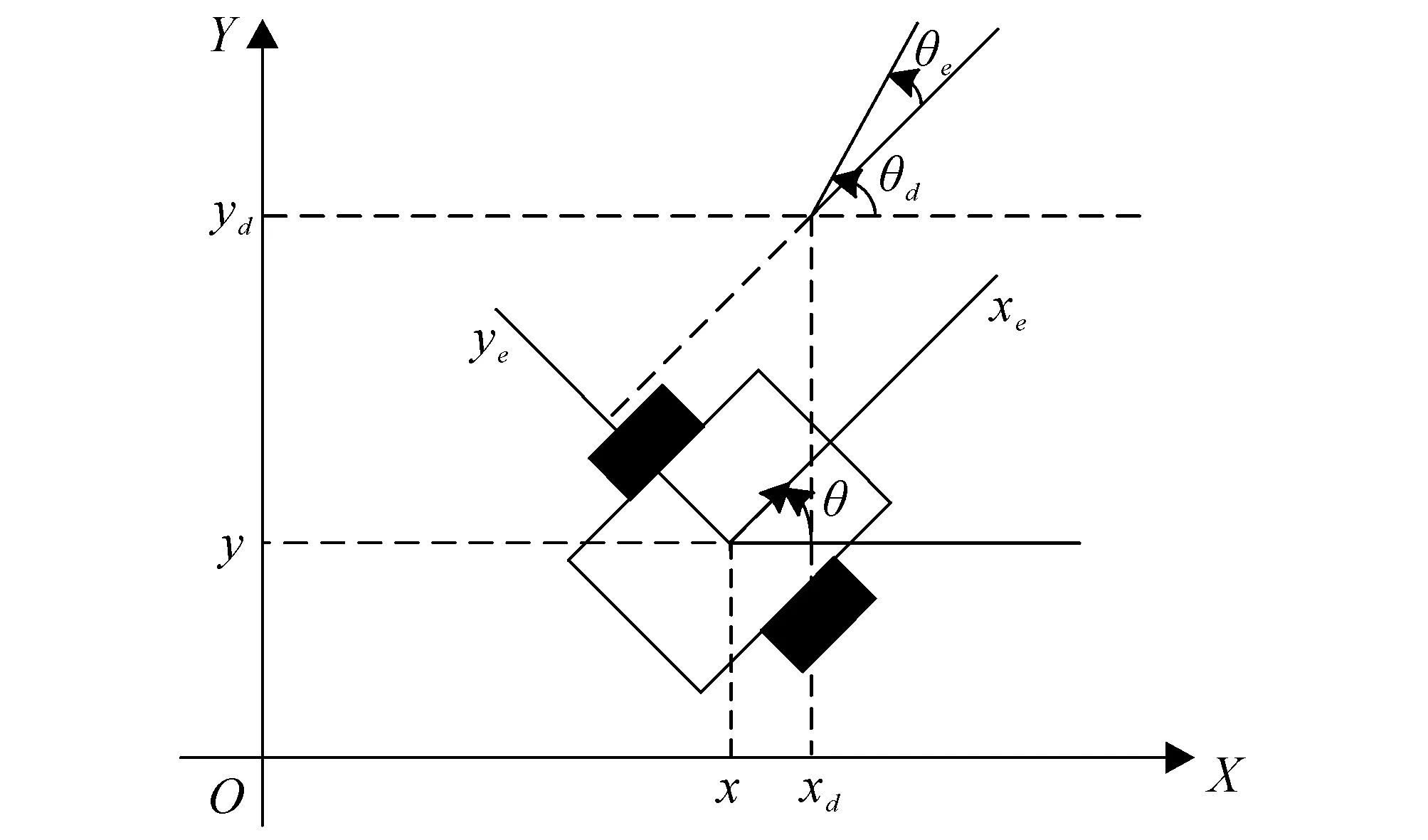
图1 移动机器人位姿误差示意Fig.1 Schematic Diagram of Pose Error of Mobile Robot
独立双后轮差动驱动移动机器人通过2个后轮的不同速度来控制机器人的速度和方向.在移动机器人的工作平面内建立直角坐标,其位姿误差如图1所示.
根据图1所示模型,得到机器人的运动学模型方程和目标轨迹方程分别为
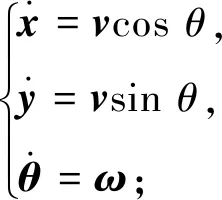
(1)
(2)
然后由坐标基本变换公式,并结合图1得到移动机器人的位姿误差方程
(3)
2 基于反演设计的滑模路径跟踪控制
反演设计方法的基本思想是,将复杂的非线性系统分解成不超过系统阶数的子系统,然后为每个子系统分别设计Lyapunov函数和中间虚拟控制量,一直后退到整个系统,直至完成整个控制律的设计.假设被控对象为
则其基本的反演设计方法步骤如下:
(ⅰ)定义位姿误差e1=x1-xd.
垦利油田群位于渤海南部海域,经多年开发,周边已建立多座平台和相应的海底管线。新油田在开发研究过程中需对周边各种依托可能性进行研究,即该稠油与周边各油田油品掺混后外输至FPSO或陆上终端储存。这就需要对各种方案开展实验,研究掺混不同油品的黏温特性。若一一开始实验,会严重影响油田的开发进程,造成不必要的人力和财力浪费。其可行的方法是研究该油田原油掺混黏度相关规律,通过计算预测掺混后黏度数据,用于依托海管的计算。

所以

通过设计控制律,使得系统满足Lyapunov稳定性理论条件[10],e1和e2以指数形式渐近稳定,从而保证系统具有全局意义下指数的渐近稳定性.
反演控制器的设计步骤如下:
(8)
(ⅱ)取切换面函数s1=e1,s2=e2.通过设计虚拟控制量β,使得
(9)

β=arctan(|m1|/|m2|),v=u2/sinβ.

(ⅴ)取切换面函数s3=e3,将角速度控制律设计为
(4)
为了消除干扰,采用低通滤波器Q(s),
(5)
3 基于有界输入的改进型滑模路径跟踪控制
设需跟踪的路径为φ*(·)=(x*(·),y*(·),θ*(·)).若机器人能够收敛并遵循约束条件,则可跟踪路径.此时定义|v*(t)|,|ω*(t)|的范围如下:
其中v*(t)和ω*(t)分别为控制输入线速度和角速度与时间相关的函数.
根据移动机器人的模型(1),如果φ*(·)=(x*(·),y*(·),θ*(·))可跟踪,那么移动机器人的输入也必须满足约束条件(4).也就是说,对于∀t≥0,都有
(6)
条件(5)和(6)确保机器人在约束输入下跟踪φ*(·),因此它们是φ*(·)作为可跟踪轨迹的必要条件.接下来定义
(7)
由于可实现e1,e2→0,因此实现tanh(pe1),tanh(qe2)→0,此时可将(7)式中的减数分别用m1,m2来替代,并通过设计虚拟控制量β,使得
(8)
将(8) 式变形,则虚拟控制律和线速度分别设计为
角速度控制律(4)不变,并采用低通滤波器(5)消除干扰.
在构建控制器之后还需要判断该控制器是否满足系统的稳定性,如果设计不合理,系统在控制过程中就会产生不稳定现象,系统误差会越来越大,从而导致试验失败;因此,稳定性分析是十分有必要的.
(9)
设计切换函数,使得s1,s2→0.选取等速趋近律,令
(10)
4 仿真分析

图2 正弦曲线跟踪效果对比Fig.2 Tracking Effect Comparison of Sine Curve
对改进后的移动机器人路径跟踪进行Matlab仿真,初始位姿为(0.4,-0.2,0),期望轨迹为|xd|=t,|yd|=sin (0.5|xd|).采用基于反演设计的滑模控制器跟踪正弦曲线路径时,取k1=k2=0.3,k3=0.5,q=3;采用基于有界输入的改进滑模控制器跟踪正弦曲线路径时,取a=b=1.0,p=q=10.
图2示出2种不同方法下的跟踪效果对比.由图2可见,基于有界输入的改进控制器在0.2 s内就实现了精确的路径跟踪,而基于反演设计的滑模控制器在6.3 s后才实现较准确的路径跟踪.这说明基于有界输入改进法明显比基于反演设计法的动态性能好.
图3示出x和y方向的跟踪效果对比.由图3可见:在x方向上,2种方法的跟踪效果区别不大,但基于有界输入改进法仍然比基于反演设计法的效果要好;在y方向上,基于有界输入改进法明显比基于反演设计法的动态响应快.
图4示出控制输入的线速度和角速度曲线.由图4可见,2种方法的控制都较平稳,相对来说,基于有界输入改进法的控制输入更理想.

图3 x和y方向跟踪效果对比Fig.3 Tracking Effect Comparison of x and y Direction
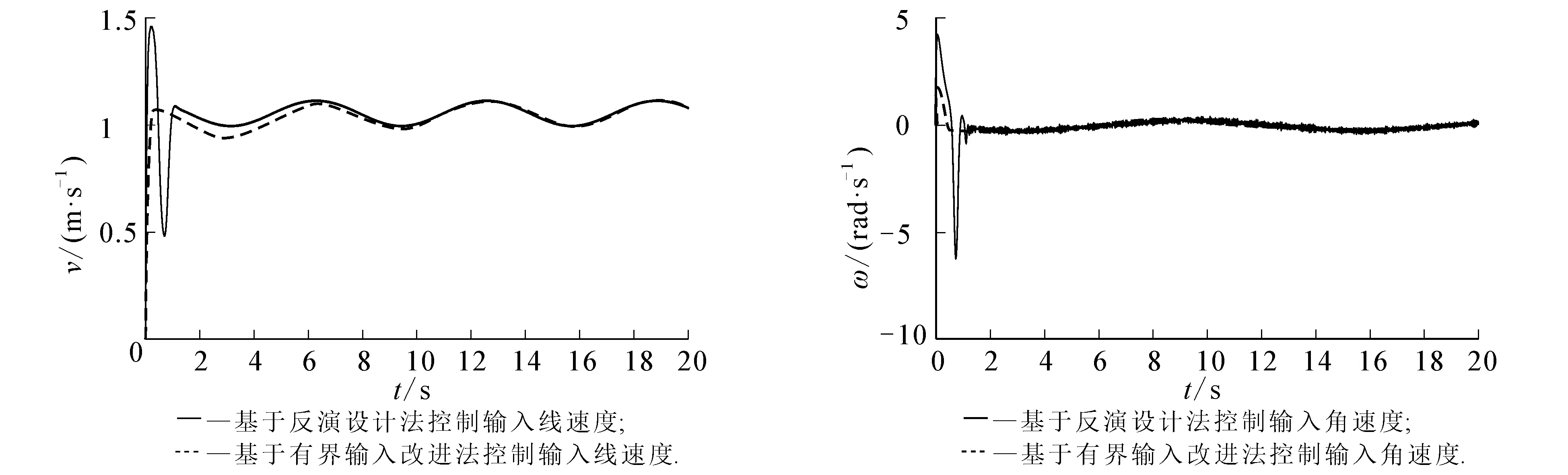
图4 控制输入的线速度与角速度曲线Fig.4 Linear Velocity and Angular Velocity Curves of Control Input
5 结语
利用反演设计的思想设计了滑模控制器,并采用低通滤波器有效地减弱了干扰,提高了系统的鲁棒性.由于控制器的动态性能不理想,因此在此基础上做了相应改进,即给出了有界输入须满足的约束条件.实验结果表明,在相同的参数条件下,基于有界输入的滑模控制器在0.2 s内就实现了精确的路径跟踪,而基于反演设计的滑模控制器在6.3 s才实现较精确的路径跟踪.笔者验证了基于有界输入改进控制器的可行性和有效性,为更准确、更快速地实现移动机器人跟踪控制奠定了基础.
猜你喜欢
北京航空航天大学学报(2022年6期)2022-07-02
中国惯性技术学报(2020年4期)2020-12-14
浙江海洋大学学报(自然科学版)(2020年5期)2020-06-19
电子技术与软件工程(2019年6期)2019-04-26
考试周刊(2018年95期)2018-11-14
山东工业技术(2018年5期)2018-03-10
制造技术与机床(2017年3期)2017-06-23
科技创新与应用(2016年34期)2016-12-23
新高考·高一物理(2016年3期)2016-05-18
组合机床与自动化加工技术(2014年12期)2014-03-01
