船载移动三维激光扫描系统的设计与实现
2020-03-17 01:01崔晓冬栾奎峰朱卫东
海洋技术学报 2020年6期
沈 蔚,惠 笑,崔晓冬*,栾奎峰,朱卫东,张 进
(1.上海海洋大学 海洋科学学院,上海 201306;2.上海河口海洋测绘工程技术研究中心,上海 201306;3.上海海洋大学 海洋科学与技术实验教学示范中心,上海 201306)
激光雷达扫描系统可以高效、快速地获取目标物的外部信息,目前已广泛应用于测绘行业。依据扫描系统载体,该系统可分为机载、车载和船载3类[1-2]。由于激光雷达扫描系统的独特优势,船载激光雷达扫描系统在海岸带海岛礁测绘、港口码头测量、近岸工程变形监测中发挥了重要作用。汪连贺[3]使用了奥地利RIEGL公司的VZ1000激光扫描仪与中海达iStreet影像采集子系统进行了海岛礁测量,并将获取数据与RTK数据比对,进行了精度分析。李杰等[4]使用Optech ILRIS-LR激光扫描仪对海岛海岸带进行了动态的远距离测量,并获取了三维信息和回波强度信息,实现了船载扫描系统对海岸带信息的高精度采集。本文阐述了船载激光扫描系统的硬件和软件设计,点云三维坐标的解算流程,并对解算点云进行RTK比对,验证了船载移动三维激光扫描系统的较高精度。
1 系统设计
1.1 工作原理与硬件组成
对于船载激光扫描系统而言,通过GPS和IMU获得航迹上激光发射中心的空间坐标和设备的空间姿态,内插后可以获得任何时刻激光光束的姿态和发射中心的空间坐标,结合激光扫描仪获取的发射中心到地面物体的距离和扫描角度,可以求得每一个激光脚印点的空间三维坐标,实现对目标物的三维建模。
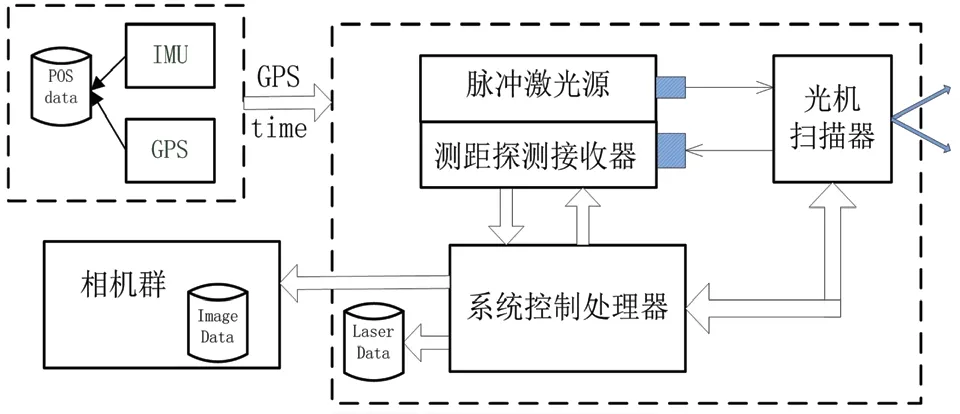
图1 船载三维激光扫描系统组成
船载移激光雷达扫描系统由脉冲激光源、测距探测接收器、系统控制处理器和光机扫描器组成,外联IMU、GPS定位系统(如图1所示)。
(1)本系统的激光扫描仪采用中科院技术物理研究所研制的船载激光雷达主机系统,回波信息包含距离信息、回波次数、回波脉宽、POS授时数据等。激光扫描仪主要参数如表1所示,扫描距离最远可达2 000 m,精度可达4 cm @1 000 m,且可提供100°开角的扫描视场,能够满足海上复杂作业情况的需要。
(2)IMU传感器采用Octans Ⅲ光纤罗经,能够提供0.01°精度的横摆角、纵摇角改正参数和0.1°精度的航向信息,其主要参数如表2所示。

表1 激光扫描系统主要参数

表2 Octans Ⅲ光纤罗经主要参数
1.2 硬件系统安装
(1)船载测量系统各传感器安置在稳定的船载平台。激光扫描仪开角水平向上最大为52°,向下为48°(如图2所示)。为避免扫描视场受到干扰,安装时需对仪器进行架高。
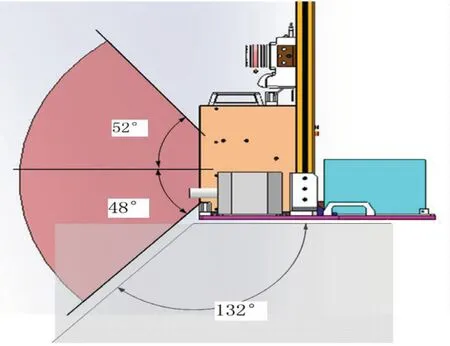
图2 激光出射角度示意图
(2)使用全站仪测量GPS天线中心和激光扫描仪中心相对于IMU中心的偏移量,量取IMU直角坐标系与激光扫描仪直角坐标系三轴的旋转角度。为保证坐标解算的准确性,需对安置角进行检校[5]。
1.3 软件系统
软件系统由激光扫描仪配套的数据采集软件和自主开发的点云解算软件组成。采集软件可获取距离信息、回波次数、回波脉宽、授时数据和扫描角度等。点云解算软件由IMU处理模块、GPS处理模块和点云解算模块组成。
1.4 工作流程
激光扫描系统各传感器安装在稳定的船载平台[6],完成测线布设、GPS基准站架设和偏移参数测量后,进行船载测量。GPS基准站的开机时间应早于POS设备的开机时间、晚于POS设备关机时间。获取IMU与GPS数据内插后,结合激光雷达扫描数据,可进行三维坐标的解算工作。完整的船载测量系统工作流程如图3所示。
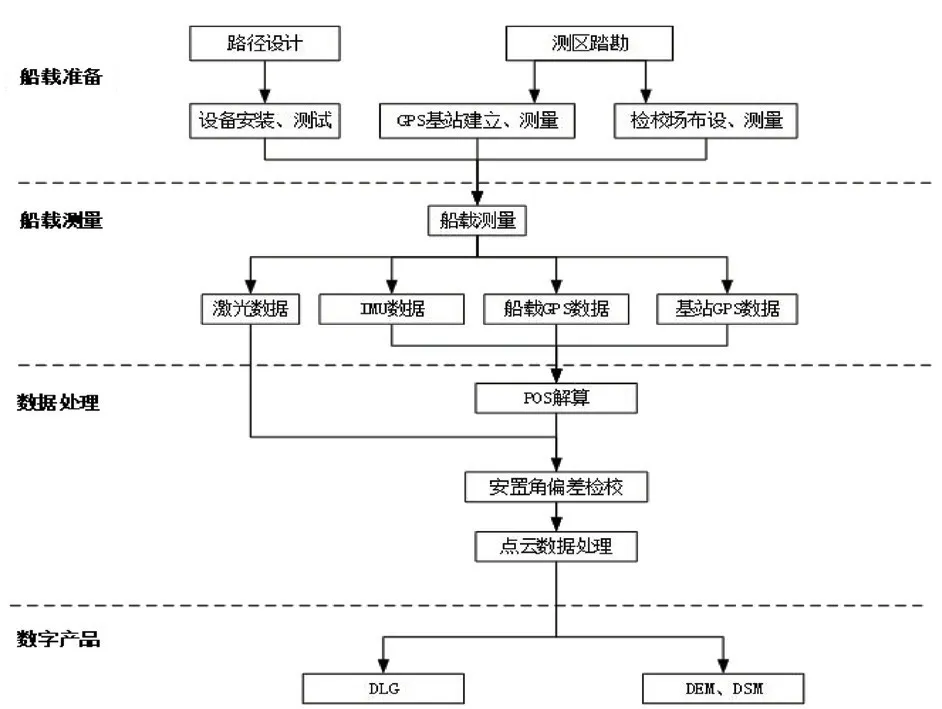
图3 船载测量系统工作流程
2 点云解算
从激光雷达的原始测距信息到三维点云数据,主要分为两个阶段:第一阶段为时间匹配,第二阶段为坐标计算[7]。
2.1 时间匹配
由于船载激光雷达的采集频率远高于GPS和IMU传感器,需要对POS数据进行内插后得到任意时刻激光波束的姿态信息和空间位置信息。结合回波的距离信息和扫描角度,可准确求得激光脚点的三维坐标。严格的时间匹配是坐标解算的前提[8-9]。
2.2 坐标解算
坐标解算涉及多个坐标系统,激光雷达坐标系、IMU坐标系、当地坐标系和WGS84坐标系[10]。解算前需量取GPS和激光扫描仪相对于IMU的坐标中心偏移量,以及激光扫描仪与姿态传感器之间的坐标旋转角。坐标解算表达式为:
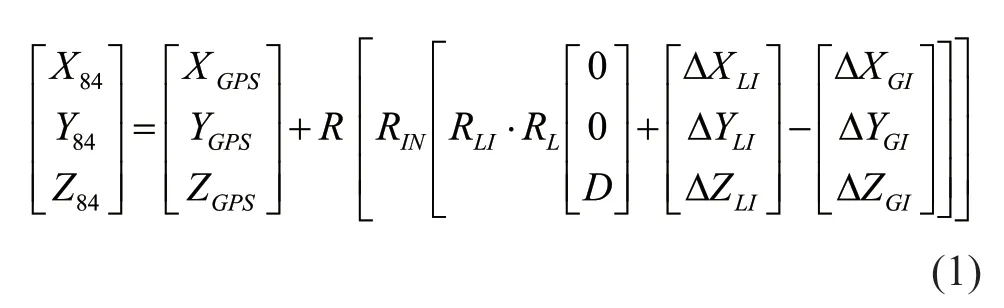
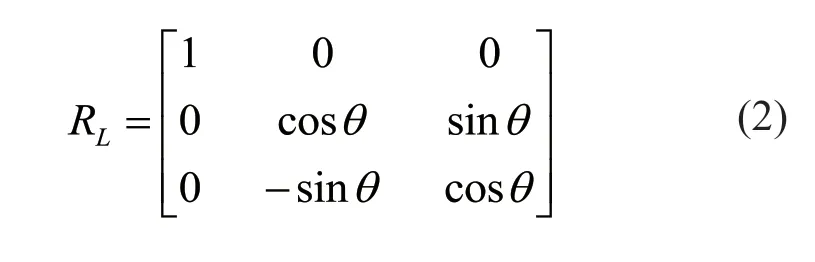
式中:X84,Y84,Z84为POS系统的GPS天线中心的WGS-84坐标,RL为激光的旋转矩阵。设激光波扫描仪到目标物的距离为D,激光扫描仪瞬时坐标系到激光扫描仪直角坐标系束在瞬时坐标系下的出射角为θ,则RL的表达式为:
在IMU直角坐标系中,船舶航行方向为X轴,Y轴为激光扫描方向,Z轴与XOY构成右手系,垂直于XOY面向上。ΔXGI,ΔYGI,ΔZGI为GPS天线中心到IMU传感器中心的偏移量;ΔXLI,ΔYLI,ΔZLI为激光扫描仪中心到IMU中心的三个轴的偏移量。RLI为激光扫描仪直角坐标系到IMU直角坐标系的旋转矩阵,为确保点云数据的精准度,需进行检校,获取精确的安置角,RLI为:
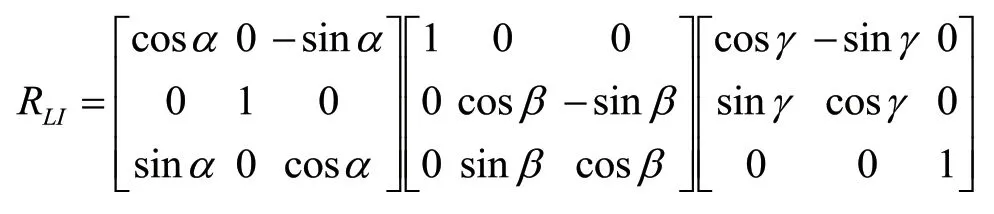
RIN为IMU直角坐标系到当地坐标系的旋转矩阵,由IMU提供的roll,pitch,heading三个参数构成,形式与RLI一致,roll,pitch,heading分别对应式中的α,β,γ。
R为当地坐标系到WGS-84坐标系的旋转矩阵,公式为:

式中:B,L,H分别是纬度、经度和海拔高。
3 精度分析
为检验船载激光扫描系统精度,本文开展了某河道船载移动激光扫描实验,经过完整的采集和处理流程后得到的三维点云如图4所示。对船载激光扫描仪获取的特征点坐标与RTK实测值进行比对(如图5所示),其平面误差,X方向上最大误差为0.07 m,中误差为0.020 5;Y方向最大误差为0.06 m,中误差为0.023 2。高程误差,Z方向上最大误差为0.09 m,中误差为0.024 3。高程误差略高于平面误差。

图4 点云数据解算结果

图5 精度评定检验结果
4 结论
本文首先阐述了船载激光扫描系统的硬件和软件设计,系统的工作流程;并对解算的点云坐标与RTK实测值进行比对,其平面和高程最大误差不超过9cm,验证了船载移动三维激光扫描系统的较高精度。通过实验研究证明,本文设计的船载激光扫描系统,软硬件性能可靠,数据精度满足行业标准要求,可广泛应用于海岸带、海岛礁、港口码头、航道、桥梁测绘等领域。
猜你喜欢
现代仪器与医疗(2022年2期)2022-08-11
中学生数理化·七年级数学人教版(2022年4期)2022-04-26
中学生数理化·七年级数学人教版(2022年4期)2022-04-26
中学生数理化·七年级数学人教版(2022年4期)2022-04-26
汽车观察(2021年8期)2021-09-01
中学生数理化·七年级数学人教版(2021年4期)2021-07-22
空间科学学报(2020年6期)2020-07-21
模具制造(2019年3期)2019-06-06
中国交通信息化(2019年1期)2019-03-26
电子制作(2018年16期)2018-09-26