轻小型无人机远海岛礁航测关键技术研究
2020-03-17 01:01:42丁晓波
海洋技术学报 2020年6期
毕 凯,丁晓波
(1.国家基础地理信息中心,北京 100830;2.中国测绘科学研究院,北京 100039)
远海岛礁是国家领土的重要组成部分,其影像图、地形图等精确的基础地理信息是划分领海、维护国家主权和国家安全的重要依据[1]。我国远海岛礁数量多、分布广,大多无法登岛测绘[2-3]。长期以来,远海岛礁的基础地理信息主要依靠卫星和通用有人机航空摄影测量等技术手段获得。尽管卫星影像的分辨率已经达到0.31 m,但该分辨率仍无法满足大比例尺测绘成果的生产要求;通用有人机航空摄影易受敏感空域、机场条件、天气、启动程序复杂性等限制,同样难以完全满足需要[4]。因此,如何获取我国远海岛礁精确的大比例尺基础地理信息,是现阶段急需解决的技术问题。
相比卫星遥感和通用有人机航空摄影,轻小型无人机具有隐蔽性强、机动灵活、受天气影响小、影像获取分辨率高等诸多优点,可成为我国远海岛礁遥感数据获取的有效补充技术手段[5-8]。但利用轻小型无人机开展远海岛礁高分辨率立体测绘工作仍存在技术问题:一是如何确保轻小型无人机续航里程足够从岸基起降获取数百公里外的岛礁影像,且能保证全航测实施飞行监控,减少作业风险;二是如何针对远海岛礁的特点开展航摄技术设计,避免大量航摄像片主点落水,确保航摄成果能满足后续数据处理要求;三是如何不登岛即完成轻小型无人机所获影像的摄影测量处理,生产符合精度要求的大比例尺影像图、地形图等测绘产品。
针对远海岛礁高分辨率立体测绘工作存在的实际困难,本文提出了一种利用轻小型无人机开展远海岛礁高分辨率影像获取与无控测图的测绘技术方法。重点研究解决轻小型无人机飞行平台远距离续航、全航程实时通信导航和无控制测图等关键技术,探索建立顾及岛礁特征的无人机航摄设计技术指标,通过对多个远海岛礁影像获取与影像处理验证该方法的可行性,这对于提升我国远海岛礁大比例尺遥感测绘技术与装备能力具有重要意义。
1 远海岛礁航测基本要求
1.1 影像分辨率要求
明确远海岛礁的影像分辨率是其航测工作的首要工作。随着卫星遥感影像资料的增多,形成了30~0.31 m从低到高分辨率光学卫星遥感影像集合,利用其测制的中小比例尺基础地理信息成果,基本满足了远海岛礁遥感识别的需要。
但远海岛礁精细地表覆盖分类[9]、围填海监测、工程监测等需要更高分辨率的影像支撑。由于卫星影像分辨率的限制,当前远海岛礁航测工作使用地面分辨率不低于0.2 m的航摄影像,重点岛礁或重点工程监测所需的影像地面分辨率甚至更高,有的甚至需要0.05~0.1 m。
1.2 航摄范围确定原则
远海岛礁航测的另一项重要工作是明确航摄范围。划定航摄范围时,对于面积小于500 m²的单礁型海岛礁,以海岸线为基线、L=50 m为划定扩展区,若扩展区与面积≥500 m²海岛礁的岸线不相交,将扩展区界线作为岛礁的航测范围;若扩展区与面积≥500 m²海岛礁的岸线相交,则单礁型海岛礁作为其一部分划定航摄范围。
对于海岛礁扩展区与相邻海岛礁岸线相交组成的丛礁型海岛礁,所有海岛礁的扩展区界线与面积≥500 m²海岛礁的岸线均不相交,该丛礁型海岛礁作为航摄范围。所有或部分海岛礁的扩展区界线与面积≥500 m²海岛礁的岸线相交,该丛礁型海岛礁作为其一部分划定航摄范围[10]。必要时可也考虑将水下礁盘范围一并作为航摄区域,数据处理时可通过双介质摄影测量技术反演礁盘区域的水下地形[11]。图1是单礁型和丛礁型海岛礁示意图。
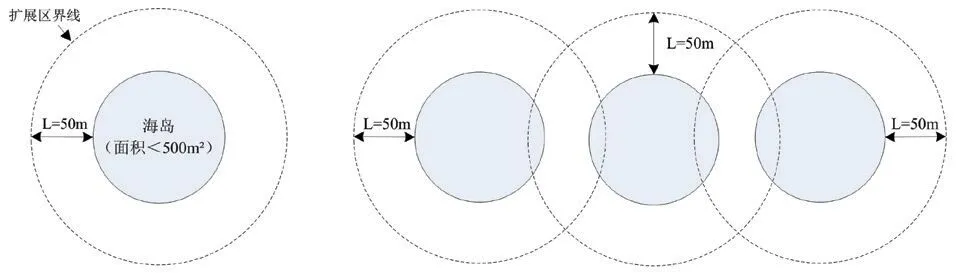
图1 单礁型和丛礁型海岛礁示意图
1.3 航测实施技术要求
与常规陆地航测或近岸岛礁航测相比,远海岛礁航测工作有着特殊的技术要求,具体概括为:“飞得到、看得见、飞得好、无控制”。其中:
“飞得到”是前提,要求飞行平台的续航时间和续航里程满足工作要求。远海岛礁航摄飞行以岸基起飞居多,要求无人机作业半径应在1 000 km以上,往返航程与航摄作业总里程应大于2 400 km,以巡航速度100 km/h计算,要求飞行平台的总续航时间大于24 h,总续航里程不少于2 400 km。
“看得见”是关键,要求跨海飞行过程中地面监控系统能实时监测无人机的飞行状况,无人机能向地面监控系统回传飞行数据,地面监控系统根据需要可向无人机发送有关飞行指令。
“飞得好”是基础,要求航摄规划能顾及海岛礁特点,避免大量影像主点落水。在航摄分区、航线敷设、航摄时间选择、飞行指标和影像质量等方面体现远海岛礁的航摄特点。
“无控制”是核心,要求实现不登岛施测像控点就能完成影像摄影测量处理。需要对无人机控制系统硬件设备进行升级改造,优化航线敷设设计、增加检校场飞行和构架航线,形成轻小型无人机无控测图的技术方案。
2 轻小型无人机远海岛礁航测关键技术
2.1 航测实施技术要求
影响飞行平台续航能力的关键因素之一是发动机性能。通过研制四冲程风冷微型发动机,配置高强度碳纤维复合螺旋桨,研究油路静电节油技术,保障油气畅通,燃料充分燃烧,节约燃油消耗。
提升续航能力的另一个关键因素是优化飞行平台的气动布局,突破无人机机身高强度碳纤维复合材料一体化成形技术和大展弦比薄型扭转机翼V型尾翼等技术,增大升力系数减小阻力,提高持续飞行能力及可靠性。
此外,通过集成大容量、高性能锂离子蓄电池,增强飞行平台的持续供电性能,开展振动、电磁、高低温、水汽雨雪、盐雾、沙尘等环境下的综合性测试。通过内陆模拟飞行实验,检验了飞行平台油电消耗及整体可靠性、稳定性和适应性。表1是轻小型无人机飞行平台在内蒙古库伦、山西大同等地开展油电测试情况的统计。
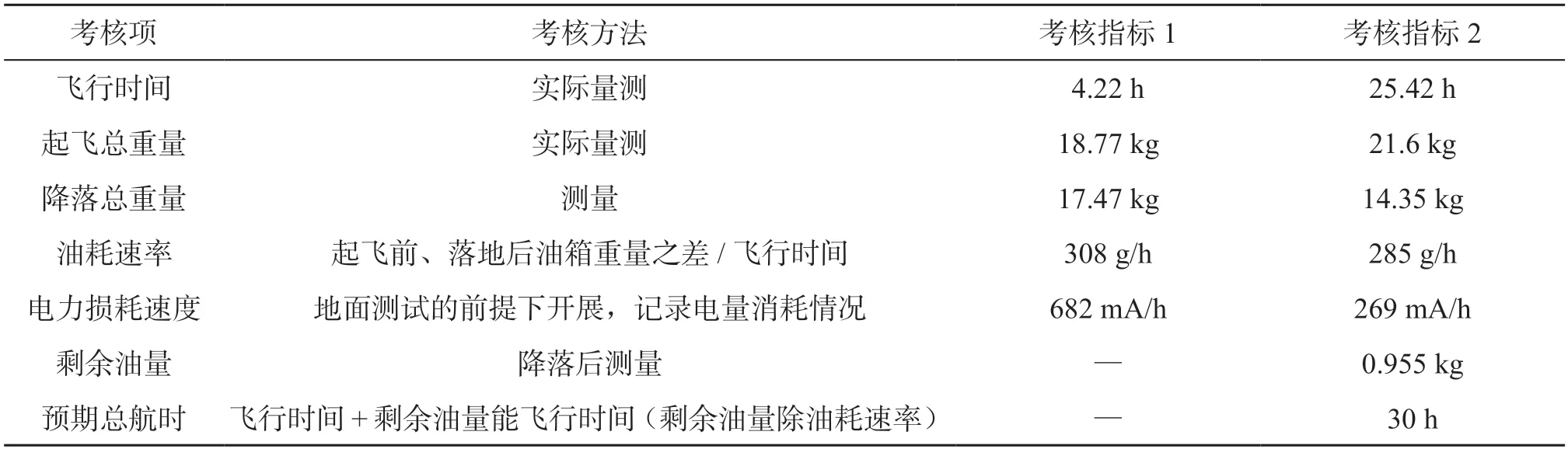
表1 轻小型无人机飞行平台油电测试情况表
表2是ZC-7型轻小型长航时无人机飞行平台主要性能指标参数,该型无人机无需使用机场,可弹射起飞、机腹擦地回收,有效载荷5 kg,续航时间30 h,满足1 000 km作业半径的远海岛礁航摄飞行要求。
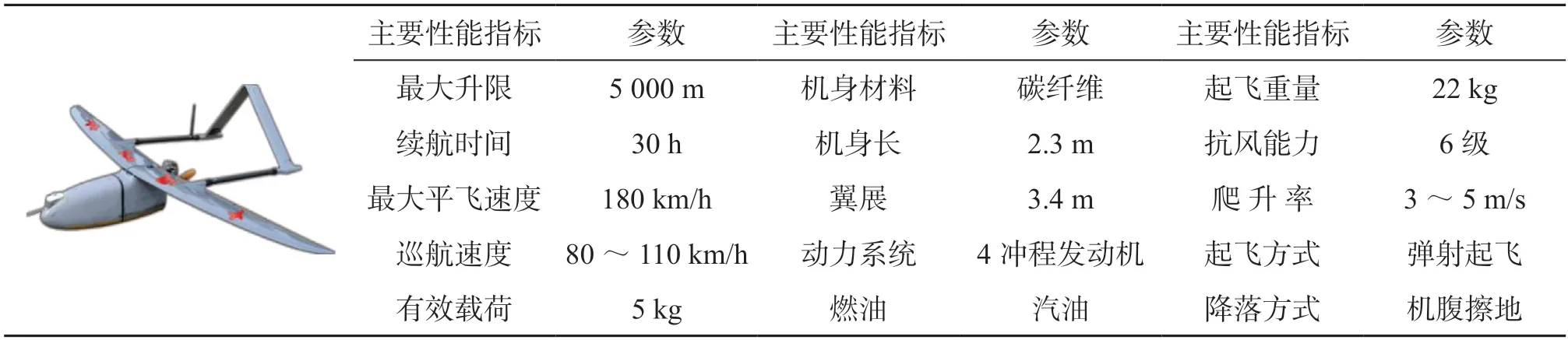
表2 ZC-7型轻小型无人机飞行平台主要性能指标表
2.2 远距离全航程实时监控关键技术
轻小型无人机多使用无线电通信、GNSS导航,此种方式易受地形影响,通信距离一般较短,导航易丢星失锁。远距离飞行时需要选择架设中继站通信,无法架设中继站时只能选择盲飞。在执行远海岛礁航摄任务时,由于距离太远,无法架设中继站实施通信保障,为减少盲飞风险,需要研究解决远距离实时飞行监控的相关技术。
(1)研究轻小型无人机的北斗通信模式[12]。利用北斗短报文通信协议的预留字段设计并确定飞行诸元的格式和传输协议,包括:数据发送时间、经度、纬度、高度、航向、速度等核心要素,通过北斗卫星实现无人机地面监控站与机载北斗通信设备之间通信信息的实时上传与下载。
(2)建立GNSS/北斗卫星双星双冗余度导航新模式,一方面设定GNSS失锁的阈值,在GNSS失锁时,触发阈值开关后机载导航信息自动切换,及时自动更改为北斗卫星导航。另一方面也可人工切换,无人机地面监控系统将导航切换信息以短报文的方式传输至北斗卫星,再由北斗卫星发送至机载北斗导航模块,无人机接收任务信息后自动切换,利用新的导航系统继续执行飞行任务。北斗/GNSS双冗余度导航,大大降低了远距离飞行过程中GNSS失锁、单系统导航失效等造成的坠机风险,是保障远海岛礁飞行安全的重要保护手段。图2是集成北斗通信系统的无人机飞行实时监控示意图。
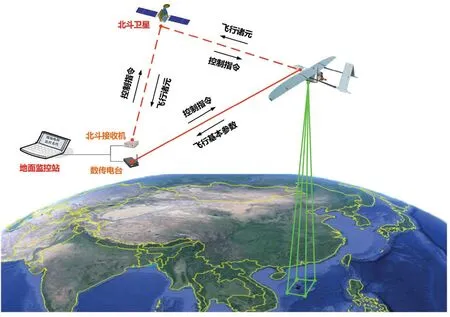
图2 集成北斗通信系统的无人机飞行实时监控示意图
2.3 轻小型无人机无控测图关键技术
无控测图是远海岛礁测绘工作的核心,是不登岛测绘即可生产基础地理信息产品的前提。轻小型无人机无控测图的技术重点是获取每张影像的外方位元素,难点在于硬件系统上的升级改造。即需要在飞行控制系统中集成使用双频GNSS,同时在飞行控制系统中集成与轻小型无人机飞行平台、飞行控制系统等相匹配的小型IMU设备。
(1)将通用轻小型无人机使用的单频GNSS升级至双频测量型GNSS,双频GNSS的OEM板与飞行控制系统有效集成,并将双频GNSS天线安置于无人机机头位置。航空摄影时,利用双频测量型GNSS记录曝光时刻的信息,利用基站数据进行事后差分或采用GNSS精密单点定位的方法计算求得每张像片曝光时刻的精确三维坐标,可作为约束条件参与自由网平差解算,以达到减少地面控制测图目的。双频GNSS飞控数据输出率优于10 Hz,精度达到10 cm级别。图3是集成双频GNSS设备的飞行控制系统示意图。
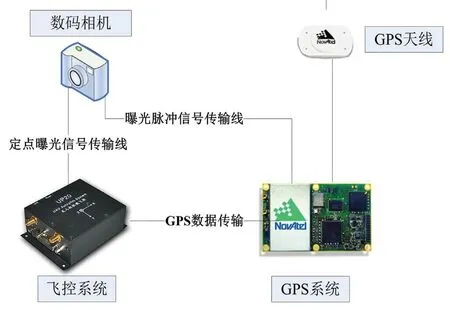
图3 集成双频GNSS设备的飞行控制系统示意图
(2)根据无控测图的需要,在调研市场微小型IMU设备情况的基础上,选择重量轻,体积小,性价比高,具备EventMark接口、EventMark反馈接口和数据输出接口功能的小型IMU设备。解决IMU与双频GNSS时间同步、IMU数据与GNSS数据紧耦合处理、IMU数据存储、IMU设备供电及电磁兼容等技术问题[13]。小型IMU设备的测姿精度俯仰角、侧滚角中误差不超过0.05°,航偏角中误差不超过0.1°,重量小于1 kg、功耗低于5 W、连续数据存储超过30 h。
(3)飞行完成后,首先利用IE(Inertial Explorer)软件实现GNSS原始数据与IMU原始数据的联合解算,获取每张影像曝光时刻高精度的位置和姿态信息。其次,利用检校场影像和像控点资料,通过空三软件解算检校场影像的外方位元素。第三,将检校场影像的外方位元素导入IE软件,解算偏心分量和偏心角系统误差改正。第四,对测区内GNSS和IMU解算的位置和姿态信息进行偏心改正,获取影像的外方位元素。
3 顾及海岛礁特征的航空摄影技术设计
当前,远海岛礁航空影像获取没有作业规范,参考框幅式航空摄影规范实施可能会使多数影像主点落水,造成影像处理困难,甚至无法处理。为保证影像获取的顺利实施,需要针对远海岛礁的特点开展航摄规划设计,系统分析远海岛礁航摄与常规航摄在航摄分区、航线敷设、航摄时间选择、飞行质量要求和影像质量要求等方面的差异。
3.1 航摄分区的划分
划定航摄分区是远海岛礁航空影像获取实施的第一步。由于岛礁远离大陆,面积较小,与常规陆地航摄相比,航摄分区应不再依照图幅进行划分。鉴于部分远海岛礁为垂直的山地地形,高差较大,按照地形高差占摄影航高的比例进行分区不再适用。岛礁航摄时,一般情况下,孤立的海岛礁可划分为一个独立的航空摄影分区[14],对于区域模型连通性较好的多个海岛礁可设为一个分区,应避免一个海岛礁被划分在两个或以上不同的航空摄影分区。分区界线尽可能囊括工作范围线。
考虑到远海岛礁面积较小的特点,当岛礁整体高差变化不大时,分区基准面高度的确定无需考虑低点高程的影响,可以直接确定为最高点高程的二分之一,即H基准=H最高/2。当岛礁高差较大时,可采用分区最高高程和最低高程的二分之一作为基准面高程,即H基准=(H最高+H最低)/2,但须尽量确保最低点影像分辨率满足相应比例尺成图要求。
3.2 航线敷设
远海岛礁具有分布零散、形态不规则等特点,开展岛礁航摄敷设需要注意以下几点:
(1)保证所有岛礁完整覆盖,尽可能避免像主点落水。以分区长边方位角为飞行方向,并使首末航线敷设在分区边界线上或边界线外[15-16]。当高差过大且无法分区时,可采用插入航线的方式设计。
(2)由于无法登岛施测像控点,为了提高模型解算精度,尽量采用定点曝光进行航线设计。除测图航线外,还需要在每个区域网两端飞行一条构架航线,构架航线穿过所有测图航线和岛礁,与测图航线的航高相同,航向重叠可比测图航线稍大。图4是岛礁测图航线与构架航摄敷设示意图。
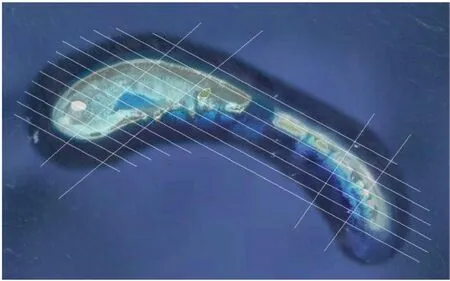
图4 岛礁测图航线与构架航摄敷设示意图
(3)由于IMU与数码相机之间的角度系统差和GNSS线元素分量偏移值无法精确测得,为保证成图精度,需要每个架次执行任务航线前飞行一次检校场,必要时可执行任务航线前后各飞行一次检校场。检校场作业航线在岸上布设,检校场航线敷设、影像航向与旁向重叠度、飞行高度等设计与常规陆地IMU/GNSS辅助航摄时一致。
3.3 航摄时间选择
远海岛礁航摄时间的选择与常规陆地航摄是完全不同的,由于岛礁距岸远,航摄作业都是跨海航摄飞行,易受风力风向的干扰,难以严格遵照太阳高度角、潮位等情况执行。
(1)估算航摄时间。既要保证起飞、降落时的足够光照条件;也要综合考虑风向、气流、温湿度等环境因素,考虑检校场飞行和航摄作业飞行时的太阳高度角的影响,尽量在正午时间段摄影。
(2)尽量选择岛礁低潮位时间段摄影。可通过查询相关资料确定摄区低潮位时间段。如遇低潮位时间摄影,但无法保证降落光照条件时,可将摄区分块航摄,以确保足起飞降落时的足够光照条件。
(3)精确记录航摄时间。可通过航摄时间段查询海况、潮汐及瞬时水位,在IMU/GNSS辅助的无控制平差时可将瞬时水位线可作为高程控制的基础[17]。
3.4 飞行质量指标要求
远海岛礁航空摄影飞行质量要求总体上与常规陆地航摄一致,不同之处有以下几点:
(1)尽量保证影像航向和旁向重叠度均匀。在确保能构成立体像对的前提下,适当增大影像重叠度,可提高摄影测量区域网的加密精度。因此,航向重叠度一般设定为80%,最小不小于60%,旁向重叠度一般设定为60%,最小不小于40%。
(2)为保证影像处理精度,根据大面积水域影像处理经验,像片旋偏角一般不超过15°。实际作业过程中,局部时间段受风影响严重,可只考虑像片旋角,像片旋角一般不超过10°,但须确保像片航向和旁向重叠度满足要求且不得连续出现。
(3)为了确保成图精度,根据常规影像处理经验,像片倾斜角不宜超过4°。由于飞行平台既轻且小、抗风能力弱,受风影响导致像片倾角偏大,在确保像片航向和旁向重叠度满足要求的前提下,倾斜角可适当放宽至8°。
3.5 影像质量要求
远海岛礁航摄的影像质量除要满足常规陆地航摄的影像质量要求外,还应注意朵云和像点位移的影响。如遇影像存在朵云,若未遮挡岛礁陆地部分,不影响立体模型的连接和测绘,可认为合格。应尽量消除飞机地速对影像像点位移的影响,合理设置数码相机的快门,将像点位移控制在1个像素以内。
4 实验验证
选取我国某些海岛作为实验区,分别以平坦海滩建立岸基起降基地,开展无人机远海岛礁影像获取与影像处理实验。图5是无人机远海岛礁航测某实验区域位置示意图。

图5 无人机远海岛礁航测实验区域位置示意图
4.1 工作流程
远海岛礁影像获取及无控测图处理主要包括:顾及岛礁特征的航摄规划与基站架设测量、检校场飞行与解算、IMU/GNSS辅助航空摄影、数据联合解算、影像外方位元素计算、基础地理信息产品生成等几个关键步骤。图6是轻小型无人机远海岛礁航测工作流程图。
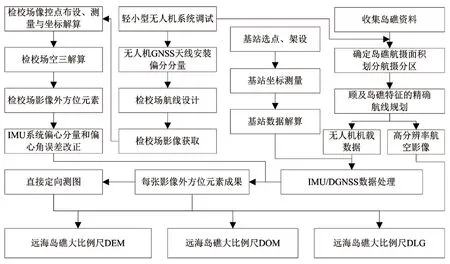
图6 轻小型无人机远海岛礁航测工作流程图
4.2 数据获取与处理
利用ZC-7型轻小型无人机获取了海岛一、海岛二、海岛三共3个摄区0.1 m分辨率航空影像。每个摄区均在岸基设计一个检校场,并飞行构架航线;基准面高程设计为最高高程和最低高程的二分之一;航向和旁向重叠度均按照80%、60%设计。经过无控测图处理,生产了DEM、DOM、DLG等基础地理信息产品。经海岛一、海岛二布设的控制点与检查点检测,无控测图的平面位置限差优于1.75m,高程限差优于1.0 m,满足1:5000比例尺丘陵地形的测图精度要求。三个摄区无人机影像获取及航测处理的基本情况见表3。
4.3 成果示例
以海岛一轻小型无人机航测工作为例,图7-a至图7-b是利用轻小型无人机无控测图技术生产的数字高程模型、数字正射影像产品示意图。

图7 某海岛轻小型无人机无控测图成果示意图
5 结论
利用研制的轻小型无人机航空遥感系统开展了多个海岛高分辨率航空影像获取及摄影测量处理实验,验证了该系统是解决远海岛礁高分辨率航测作业的有效技术装备。
(1)针对远海岛礁的影像获取需求,研制的轻小型无人机长航时飞行平台,续航时间可达30 h,作业半径大于1 000 km,岸基起降能覆盖我国99%以上的远海岛礁,解决了远海岛礁高分辨率影像的“有无”问题。
(2)为了提高远海岛礁影像获取作业过程的安全性和可靠性,对无人机的飞控系统进行升级改造,增加北斗卫星导航通信功能,实现了无人机远距离全航程的实时监控,解决了远海岛礁影像获取工作中“看得见”的问题。
(3)针对不登岛测绘开展远海岛礁影像摄影测量处理的工作需求,在现有无人机飞控系统中集成小型化高精度IMU/GNSS设备,研究了IMU/GNSS辅助的无人机远海岛礁无控测图关键技术,解决了远海岛礁无控制也能生产大比例尺基础地理信息产品的难题。
(4)针对远海岛礁特点,探索构建了顾及海岛礁特征的航摄影技术设计内容与指标,为实施远海岛礁影像获取工作提供了技术参考。
在下一步研究工作中,将继续开展轻量化、更高精度IMU与GNSS组合导航的集成研究,进一步提高IMU与数码相机之间的角度系统差和GNSS线元素分量偏移值的精度,以提高直接定向的精度,为实施远海岛礁工程化的航测工作提供技术参考。
猜你喜欢
小哥白尼(神奇星球)(2021年12期)2021-03-08 09:22:56
航天电子对抗(2019年4期)2019-06-02 08:22:46
太空探索(2016年5期)2016-07-12 15:17:58
太空探索(2016年6期)2016-07-10 12:09:06
海军航空大学学报(2015年1期)2015-11-11 17:17:59
自然资源遥感(2014年3期)2014-02-27 11:56:44
军事历史(2004年2期)2004-11-22 07:12:10