
基于人群搜索自抗扰控制的放卷张力控制系统
2020-03-16 07:04赵世海
毛纺科技 2020年1期
丁 孟,赵世海
(1.天津工业大学 机械工程学院,天津 300387; 2.天津市现代机电装备技术重点实验室,天津 300387)
张力系统作为连续轧染机的重要组成部分,其控制精度和稳定性对保证连续轧染产品的质量至关重要。织物放卷是连续轧染生产的第1步,若张力产生了波动则会影响织物的生产加工质量,对后续的生产加工过程也会造成影响[1-2]。在轧染机放卷运行过程中,由于织物料卷卷径发生变化,引起织物料卷辊转动惯量的变化,结合外部扰动和摆辊引起的织物料带长度变化等影响因素,从而导致放卷织物产生的张力出现波动[3]。放卷张力系统是具有强耦合和强干扰的非线性时变系统,因此,保证放卷张力系统的稳定运行,可以设计实现解耦控制和抗干扰性的控制器,对轧染机放卷张力控制非常重要。
目前,随着轧染生产加工工艺的复杂化,对连续轧染机生产加工的要求也越来越高,传统PID(比例积分微分)控制已经不能满足现代化的生产加工要求。近年来,越来越多的现代控制方法在张力控制中得到应用。李建等[4]将鲁棒控制应用于印染机卷绕张力控制系统中,实现了张力系统的稳定运行。汤伟等[5]提出利用模糊自适应PID的控制方法来解决悬浮包装中薄膜张力控制难的问题,实现了薄膜张力的稳定控制。王友钊等[6]采用神经网络对织机卷绕系统的张力进行控制,提高了卷绕系统的控制性能。但是上述控制方法都是建立在精准数学模型的基础上,实现良好的控制性能,而在工程应用中由于许多因素的影响,难以建立精准的模型,因而影响了这些方法的使用。
本文针对轧染机放卷张力控制问题,结合人群搜索算法(SOA)[7-9]和自抗扰控制(ADRC),建立了人群搜索自抗扰控制器,将放卷张力系统中难以建模和内外扰动等影响因素通过非线性扩张观测器实现估计和补偿,并用人群搜索算法对ADRC中的参数进行整定[10-12],通过仿真结果得出人群搜索自抗扰控制器可以实现解耦控制和内外界扰动的补偿,保证了放卷张力系统恒张力运行。
1 系统数学模型的建立
轧染机放卷张力系统包括放卷部分和牵引部分,主要实现系统的恒张力控制。图1为放卷张力系统结构图。放卷电动机和牵引电动机采用伺服电动机驱动,并使用摆辊来检测和调节张力波动。
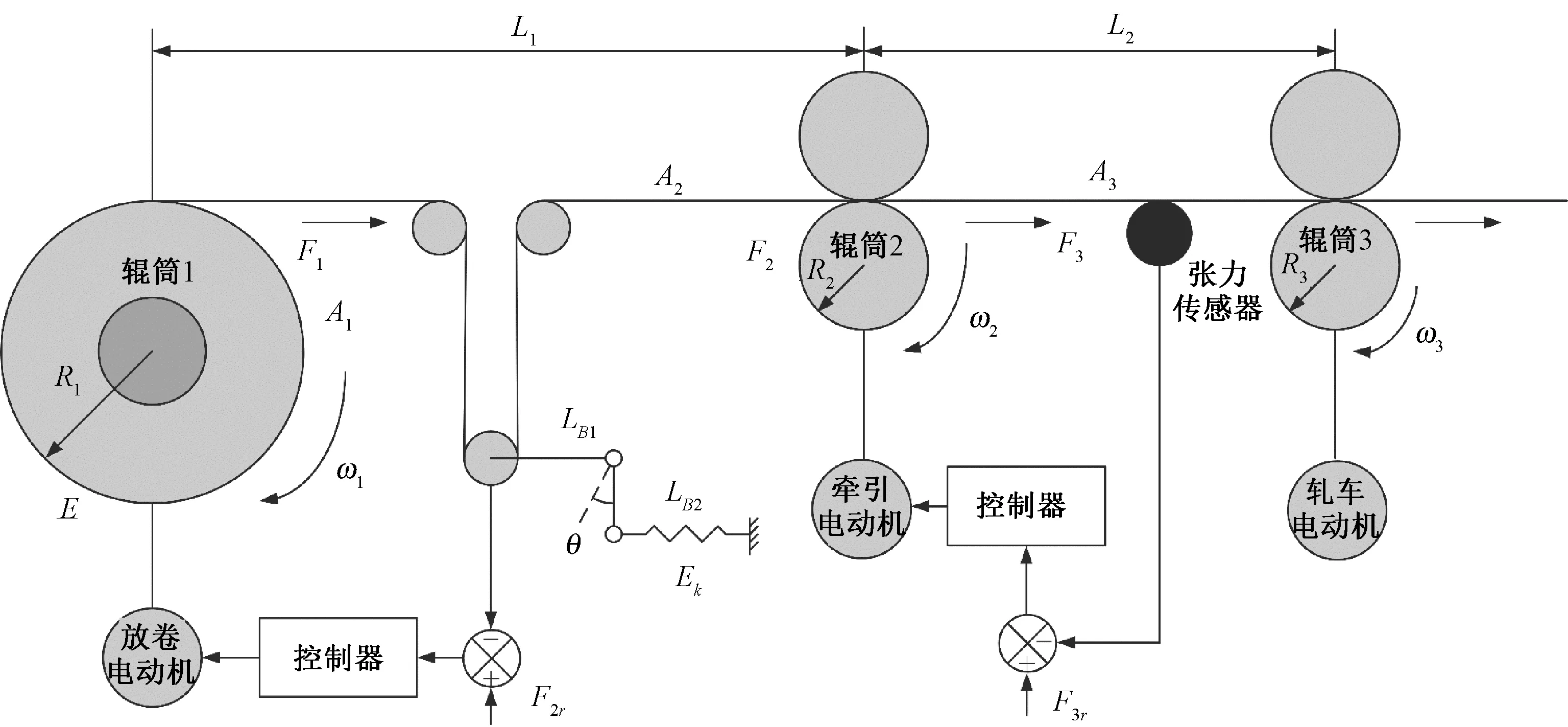
图1 放卷张力系统结构图
图1中:L1、L2为辊间织物长度,m;E为织物弹性模量,Pa;Ek为摆辊臂等效弹簧的弹性模量,Pa;Ai(i=1,2,3)为织物横截面积,m2;Ri(i=1,2,3)为各织物辊半径,m;ωi(i=1,2,3)为各织物辊角速度,r/min;Fi(i=1,2,3)为织物各部分张力,N;LBi(i=1,2)为摆臂辊各部分长度,m;Fir(i=2,3)为织物各部分张力设定值,N。
在轧染机放卷过程中,假设织物与织物辊间的运动为纯滚动,并且织物发生纯弹性变形,基于连续轧染机的工作原理,根据放卷张力系统中织物料带的质量守恒定律、摆辊及各辊的动力学原理,可得连续轧染机放卷张力系统的数学模型为:
(1)
式中:J1、J2为织物辊转动惯量,kg·m2;JBa为摆臂辊转动惯量,kg·m2;f、fB分别为织物辊、摆臂辊的摩擦阻尼系数;MR1(t)、MR2(t)为各伺服电动机的转矩,N·m。
对F2(t)、F3(t)求二阶导数得:
(2)
由放卷模型表明其系统具有耦合性。通过对系统模型解耦分析得到状态空间模型,见式(3):
(3)
式中:D(t)为系统中无输入量的动态耦合;P(t)MR(t)为有输入量静态耦合。
(4)
(5)
(6)
取静态耦合为H(t)=P(t)MR(t),H(t)为虚拟控制量,则模型见式(7):
(7)
由于|P(t)|≠0,则MR(t)=P(t)-1H(t),P(t)-1为静态解耦矩阵,见式(8):
(8)
通过对上述模型分析,在引入虚拟控制量H(t)后,使放卷张力系统实现了静态解耦控制,只需将系统中动态耦合和内外部扰动估计补偿掉,就能够保证系统完全解耦控制。
2 人群搜索自抗扰控制器设计
通过对轧染机放卷张力系统模型的分析,设计二阶人群搜索自抗扰(SOA-ADRC)控制器,人群搜索自抗扰控制器结构图见图2。
由图2可以看出,该结构主要包括安排过渡过程的跟踪微分器(TD)、非线性状态误差反馈率(NLSEF)、实现干扰估计补偿的扩张状态观测器(ESO),以及对参数进行调整的人群搜索(SOA)控制器。
2.1 自抗扰控制器
自抗扰控制器由TD、NLSEF 与ESO 3个部分构成。TD部分用vi1来跟踪系统中各段张力Fir信号,且由vi2跟踪提取张力Fir的微分信号。ESO部分对参数βi1、βi2、βi3进行合理调整,获得对系统输出张力Fi、Fi微分的跟踪估计值zi1、zi2,及动态耦合与内外干扰的估计值zi3。NLSEF部分用来分别对跟踪张力的差值ei1和微分差值ei2的控制量安排合理的分配重组,并对系统的扰动进行补偿。根据人群搜索算法,实现对自抗扰控制器中参数的整定,保证系统可以稳定运行。

图2 人群搜索自抗扰控制器结构图
具体自抗扰控制算法表示如下:
(9)
式中:ui为扰动补偿量;ri为过渡快慢因子;h为积分步长;βi1、βi2、βi3为ESO调节参数;kip与kid为NLSEF调节参数;k为离散数;ei为张力估计误差。
fal(e,α,δ)函数为:
(10)
fhan(x1,x2,r,h)最速控制综合函数为:
(11)
2.2 人群搜索算法
人群搜索算法是将人群内每个个体随机搜索行为归纳起来,通过模拟人的智能搜索行为,使个体加入到智能搜索中,并结合个体各方面的社会行为确定搜索步长与方向,经位置更新得到最优解。
人群搜索算法通过适应度值对个体或解进行优选并对其进行位置更新,使其不断地向最优解方向进行优化。选取最小目标函数为时间乘以绝对误差积分函数,并加入u2(t)预防产生过大的震荡调整,则目标函数为:

(12)
式中:c1、c2分别为误差和控制输出平方项的权值;e(t)为初始值与输出间的误差;u(t)为控制器输出。
为了保证系统稳定运行,结合惩罚控制来预防发生超调,则最优指标为:
(13)
式中:取权值c1=0.998;c2=0.002;c3=100。
采用不确定推理的模糊逻辑得到搜索步长αij为:
(14)
其参数为:
(15)
式中:uij为j维搜索空间目标值i隶属度;δij为高斯隶属函数参数;c为惯性权值。
对搜索者利己方向di,ego、利他方向di,alt和预动方向di,pro分析得式(16):
(16)
通过随机加权、几何平均,将所获取各方向进行分配组合,得到搜索方向为:
dij(t)=sign(ωdij,pro+φ1dij,ego+φ2dij,alt)
(17)
式中:xi(t1)、xi(t2)为{xi(t-2),xi(t-1),xi(t)}内最优位置;pi,best为第i个搜索个体到当前通过的最优位置;gi,best为第i个搜索个体所在邻域的全体最优位置。
通过得到的搜索步长和方向,建立搜索个体位置更新,见式(18):
(18)
3 仿真分析
为了验证人群搜索自抗扰(SOA-ADRC)控制器在解耦和抗干扰方面的控制性能,构建放卷系统模型和SOA-ADRC控制器模型,并与PID控制器进行仿真实验分析。放卷系统数学模型参数见表1,控制器参数见表2。
3.1 解耦仿真分析
由放卷张力系统模型分析,放卷部分与牵引部分的张力存在耦合性。当放卷半径R1为0.2 m、辊筒角速度ω3为100 r/min时,放卷系统张力F2在4 s时由40 N阶跃升高到45 N,6 s时由45 N阶跃降低到40 N。图3为解耦性能仿真曲线。可以看出,在人群搜索自抗扰控制下,张力F2在4~6 s发生5 N波动时,张力F3基本未发生波动,而在PID控制时,张力F2波动时,F3发生0.75 N波动。因此表明人群搜索自抗扰控制器能够实现良好的解耦控制,而PID控制器不能实现较好的解耦控制。

表1 放卷系统数学模型参数

表2 控制器参数

图3 解耦性能仿真曲线
3.2 抗参数扰动仿真分析
当ω3为100 r/min,R1依次为0.20、0.15、0.10 m时,在PID与人群搜索自抗扰控制器对张力F2的控制效果下,R1变动时F2仿真曲线见图4。
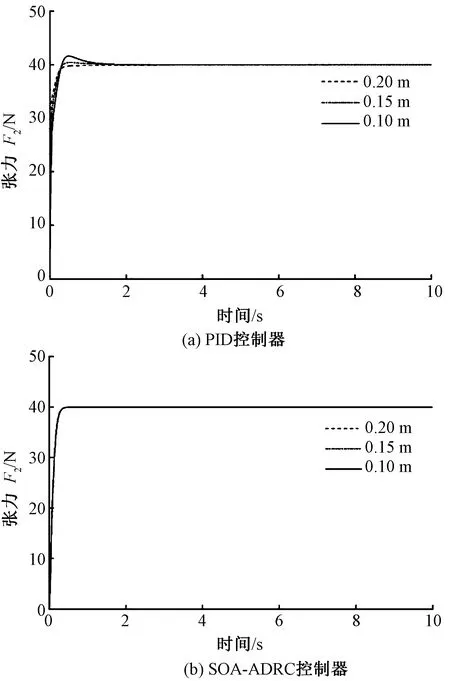
图4 R1变动时F2仿真曲线
由图4可以看出,在放卷半径逐渐减小时,采用人群搜索自抗扰控制,张力F2并不随着卷径的变化而变化,基本保持稳定;而采用PID控制时,张力F2达到稳定运行的时间变长,并有4.6%的超调量。因此说明人群搜索自抗扰控制器能有效抑制放卷辊半径变化引起的张力波动,比PID控制器有较好的抗参数扰动性能。
当R1为0.2 m,ω3为100、150、200 r/min时,在PID与人群搜索自抗扰控制器对张力F3的控制效果下,ω3变动时F3仿真曲线见图5。可以看出,当轧染机辊筒3的角速度ω3逐渐变大时,张力F3采用PID控制时达到稳定运行的时间变长,并有7.4%的超调量,但在人群搜索自抗扰控制下,织物张力F3并不会随着速度的变化而变化,基本不发生波动,并且达到稳态的时间也更快。说明人群搜索自抗扰控制器能有效抑制放卷张力系统内部参数不断变化引起的张力波动,比PID控制器有较好的抑制参数扰动性能。

图5 ω3变动时F3仿真曲线
3.3 抗外部干扰性仿真分析
由于放卷张力系统容易受到外界条件的影响,因此,在放卷张力系统中加入正弦扰动和噪声信号作为未知的干扰。在PID和人群搜索自抗扰控制器对放卷张力的控制效果下,外部干扰时F2的仿真曲线见图6。

图6 外部干扰时F2的仿真曲线
由图6可以看出,当系统受到外部因素干扰时,张力F2采用PID控制时出现剧烈的波动,影响系统的稳定运行,而采用人群搜索自抗扰控制时产生波动很小,可以使系统保持稳定,说明人群搜索自抗扰控制器有较好的抗外部干扰效果。
4 结束语
本文提出人群搜索自抗扰控制的方法,将其应用于控制系统张力的波动,使轧染机放卷张力系统控制达到稳定运行的要求。仿真实验得出,在放卷张力系统的解耦和抗干扰性能方面,人群搜索自抗扰控制比PID控制具有更好的张力控制效果,实现了放卷张力系统的稳定运行,使轧染机可以更好地适应复杂的生产加工工艺要求。
猜你喜欢
数学物理学报(2022年4期)2022-08-22
材料与冶金学报(2022年2期)2022-08-10
现代电力(2022年2期)2022-05-23
纺织科学研究(2021年7期)2021-12-02
数学物理学报(2021年4期)2021-08-30
北京航空航天大学学报(2021年7期)2021-08-13
纺织科技进展(2021年5期)2021-07-22
烟台大学学报(自然科学与工程版)(2021年1期)2021-03-19
数学物理学报(2019年4期)2019-10-10
中国洗涤用品工业(2015年8期)2015-02-28
