基于SolidWorks的AGV车架的结构设计★
2020-03-14 10:25陈媛媛
机械管理开发 2020年1期
陈 菁, 陈媛媛
(1.青岛理工大学琴岛学院, 山东 青岛 266106; 2.海口经济学院, 海南 海口 570203)
引言
AGV小车是一种以蓄电池为动力,装有特定导向机构的自动驾驶运输车。AGV小车的功能主要是,在上位机控制下,将特定的物料沿复杂路径,以一定的停位精度输送至特定的位置上[1]。
AGV小车主要包括:车体、充电电池、控制系统、驱动装置、转向装置等。其中车体由车架和相应的机械电气结构组成。AGV车车架是AGV车机械部分的关键,要求有足够的刚度和强度以满足车体运行时的要求,常采用焊接钢结构,车架外壳为3 mm左右的钢板或铝合金板。目前市场上AGV车车架的结构较为复杂,生产成本较高[2]。因此本文以AGV小车的车架为研究对象,运用SolidWorks软件,设计一种结构简单的AGV小车车架。本文所设计的AGV车架结构简单,生产成本低,并且已在青岛微科机器人有限公司得到了应用。
本文所设计的AGV车车架结构示意图如图1和图2所示。AGV车车架主要包括内车架和外车架。其中内车架主要用于安装驱动元件和电控器件,外车架主要用于安装安全防护元件。

图1 AGV车车架顶部的结构示意图
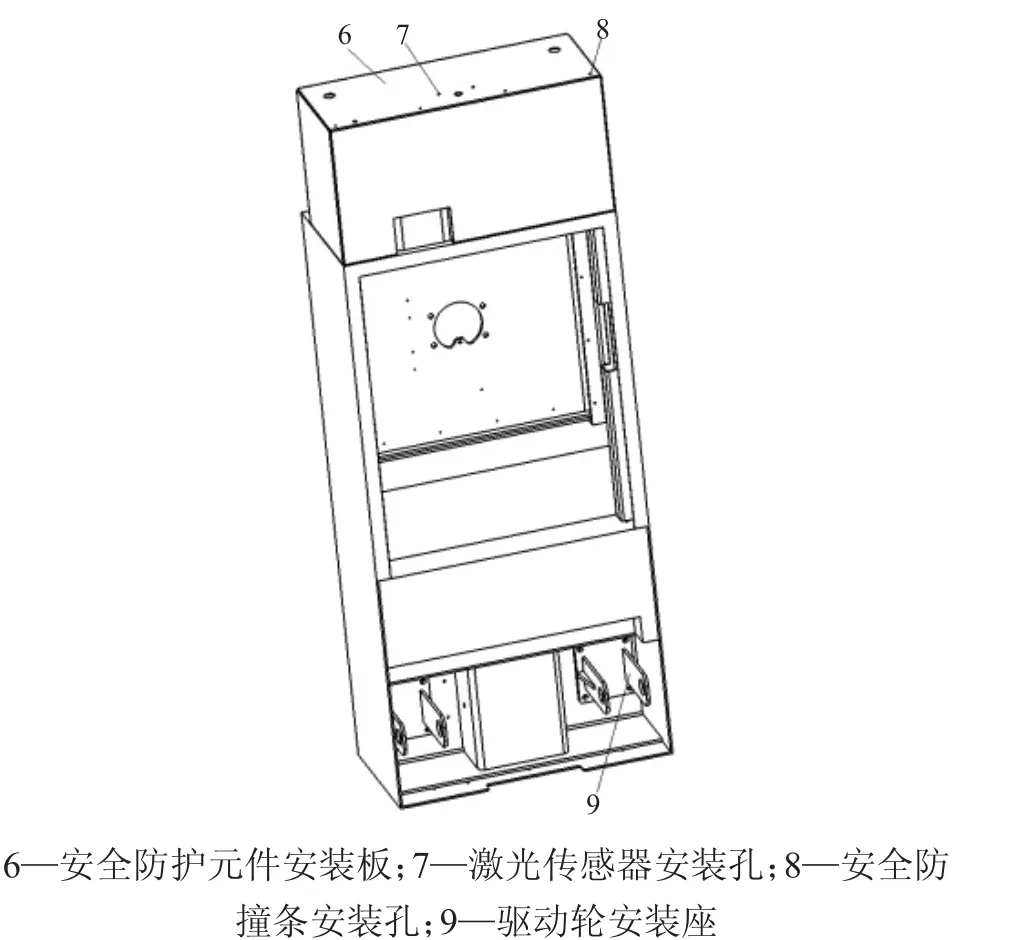
图2 AGV车车架底部的结构示意图
1AGV车车架
车架是装配AGV其他零部件的主要支撑装置,是运动中的主要部件之一,主要分为底部和顶部两个部分。顶部用于安装各种控制和通讯设备。底部则安装轮子、各种传感器和驱动电机,顶部和底部用可拆卸联接,便于安装和拆卸,总的来说AGV车架相当于汽车底盘,是AGV机械部分的关键。车架设计及工艺的合理性直接影响AGV的定位精度,应满足的主要条件如下[3]:
1)车体的强度和刚度必须满足小车承载及运行加速时的要求;
2)在保证车体有足够刚度的条件下,尽量减轻车体的质量,以提高有效承载质量;
3)尽量降低车体重心,提高整车的抗倾翻能力;
4)车体的外廓不应有突出部分,以防止碰撞其他物体。
本文根据以上所述要求,利用SolidWorks软件设计一款AGV车车架。本文所设计车架可以使AGV车体重心较低,较有利于抗倾翻。
1.1 AGV车车架顶部结构
如上页图1所示,AGV车车架的顶部主要设计电控箱、电控主器件安装板和电池保护罩。电控箱安装在AGV车车架顶部一端,主要放置电控辅器件,电控辅器件包括电路板和开关按钮。电控主器件安装板同样安装在AGV车车架顶部,厚度是2 mm。电控主器件安装板上设计电机安装孔和驱动器安装孔,电机安装孔用于固定AGV车电机,驱动器安装孔用于固定AGV车驱动器。电池保护罩由三块厚度为2 mm的钢板焊接在一起,用于防护AGV车电池。
1.2 AGV车车架底部结构
如上页图2所示,AGV车车架底部主要设计安全防护元件安装板和驱动轮安装座。安全防护元件安装板用于固定安全防护元件。安全防护元件安装板上设计激光传感器安装孔,安全防撞条安装孔。激光传感器安装孔用于固定AGV车激光传感器,安全防撞条安装孔用于固定AGV车安全防撞条。驱动轮安装座固定在AGV车车架底部,用于支撑AGV车驱动轮。
2 结论
以AGV小车车架为研究对象所设计的车架,可以使整个AGV小车车体重心较低,有利于抗倾,对整个AGV行业和物流行业的发展具有一定的积极意义。
猜你喜欢
汽车实用技术(2022年16期)2022-08-31
物流技术与应用(2022年5期)2022-06-17
汽车实用技术(2022年5期)2022-04-02
汽车实用技术(2022年5期)2022-04-02
中国新技术新产品(2020年4期)2020-05-05
中国自行车(2018年4期)2018-05-26
科技创新导报(2016年27期)2017-03-14
汽车实用技术(2015年8期)2015-12-26
汽车维修与保养(2015年12期)2015-04-18
汽车维修与保养(2015年2期)2015-04-17