眼科显微手术机器人的研究与发展
2020-03-10 01:54:28王宁张小栋张政张红兵
机器人技术与应用 2020年6期
王宁 张小栋 张政 张红兵
(1 西安交通大学机械工程学院,西安,710049;2 西安市第一医院,西安,710002)
0 引言
医学上一般认为,眼睛特发性黄斑裂孔可能与玻璃体牵拉有关。该病起病隐匿,常在另一只眼被遮盖时才被发现,因此早期发现并及时治疗,是影响患者最终愈后的关键因素。
临床上主要依靠眼科医生眼底检查及OCT 辅助检查对该疾病进行诊断和分期。目前,通过玻璃体切除,特别是剥除玻璃体后皮质、视网膜前膜或内界膜,松解黄斑裂孔周围的牵拉是最主要和有效的治疗手段。然而,在手术过程中,由于医生手部自然抖动、长时间操刀身体劳累、病变体眼部空间视野角度狭小致使操作不当等原因,术后会引起白内障、视野缺损、医源性视网膜裂孔、黄斑裂孔扩大、光毒性引起的视网膜色素病变等并发症。因此,如何精确定位上述牵拉因素所在层次结构,消除非自愿运动如震动、急促和低频漂移,克服生理障碍,开发新的眼内手术方式,提高现有手术操作的安全性,同时增加医生视野角度,降低手术创伤或视野不清等引起的医源性损伤等等,均是急需攻克的难关。
为此,本文在深入阐述分析国内外相关技术研究现状的基础上,围绕黄斑裂孔眼科手术临床存在的“险”、“难”、“盲””、累”等技术挑战,展开眼科显微手术机器人(OMOR)的研究。主要内容包括:
1)从手术机理角度,研究眼科手术生物力学机理;
2)从手术工具角度,研究手术机械臂、精准操作末端执行器、人机协同控制模块;
3)从手术视野角度,研究术中OCT 成像技术、术中器械高精度触觉反馈模块;
4)从手术效果角度,建立全手术过程的安全性与有效性评估体系、机器人手术操作流程及规范,整体提高手术安全性。
拟攻克的关键技术主要包括:
1)OCT 对黄斑裂孔周围玻璃体后皮质、视网膜前膜或内界膜的精确识别;
2)OMOR 抓持精准度高精度操作、细微振动滤除及高灵敏度触觉反馈;
3)多模态医学影像亚像素级分割和三维重建及多模信息融合;
4)OMOR 手系统集成与实时、准确、高效的人机协同控制。通过上述研究,拟实现小型机械手具有高抓持精度技术、多传感器信息融合技术、低频漂移的滤除技术、系统集成及人机协同控制技术等多项技术的创新。
1 国内外发展现状分析
眼科显微手术机器人融合了机器人技术、显微外科技术、生物力学等多种学科技术,能够辅助甚至代替医生完成复杂的诊断以及手术操作,可避免传统眼部微创手术操作环境可视性差、手术时间长、医生手部生理颤振等弊端[1]。近年来,医学影像技术、传感器感知技术以及机器人精密运动控制技术的发展,极大地促进了眼科手术向微创化、智能化、精准化方向发展[2]。
1.1 国外研究现状
1989 年,法国里尔第一大学的Guerrouad 和Vidal[3]设计了Stereotaxical 操作机械臂,并完成了相关的性能测试实验。
该操作机械臂是最早的眼科机器人系统之一,由安装在可实现3 个运动自由度的平台上的球型机械臂组成,其腕部结构可以实现4 个运动自由度。
美国约翰斯·霍普金斯大学的学者们[4-5]针对眼科机器人提出了远程运动中心(RCM)机构的概念,并实现了人机协同操作的控制方式。RCM 机构可以约束器械绕空间某一定点旋转,眼球空间的约束问题得以解决;人机协同操作模式是指医生直接握持机器人末端的手术器械,通过器械端的六轴力传感器将操纵力传递给机器人控制系统,进而实现对机器人的运动控制。
荷兰埃因霍温大学以及英国牛津大学的学者们[6-7]针对视网膜手术研发了Preceyes 机器人,采用主从操作方式,主、从手采用同构构型,从手可根据霍尔传感器来检测关节的转动,并通过配重实现了机构的静平衡,为医生提供了更为直观的操作方式,如图1 所示。2016 年,在医生的操纵下,Preceyes 机器人完成了全球首例机器人辅助操作的视网膜手术,成功从一位病人的视网膜表面摘掉了0.01mm的再生膜[8]。2018 年6 月,牛津大学团队用该新型医疗机器人为多名患者完成了眼部手术,手术结果与人工手术结果相同。
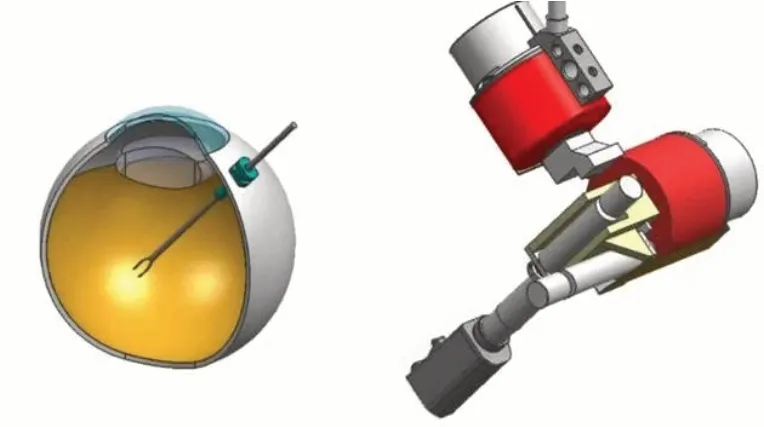
图1 Preceyes 机器人主操作手示意图
比利时天主教鲁汶大学的学者们[9-10]针对视网膜静脉血管插管术研发了一套主从式机器人,其主操作器采用丝驱动形式,构型与机械臂的运动同构,复现了器械在眼内的自由度,如图2 所示。2017 年,该机器人成功完成了全球首例视网膜静脉血管插管术的临床手术[11]。
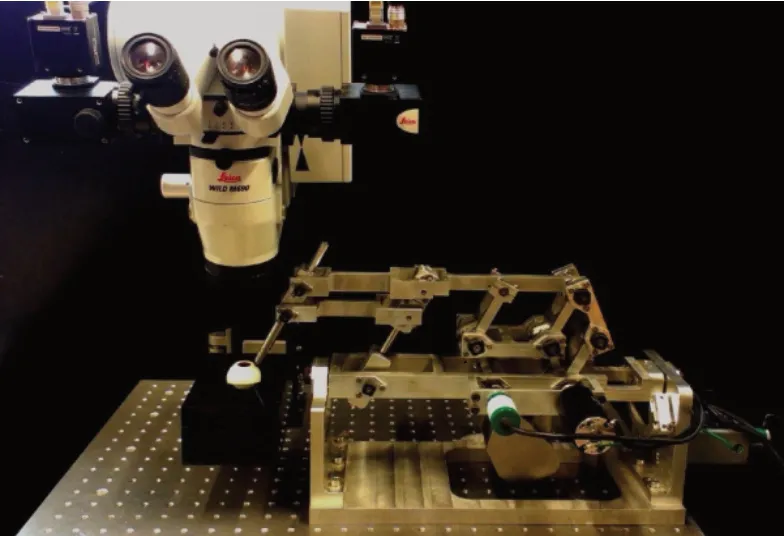
图2 鲁汶大学主从式操纵平台
法国斯特拉斯堡大学的研究者们[12]于2015 年对右眼有颞叶和鼻窦痛的73 岁患者使用达芬奇手术机器人系统成功进行了翼状胬肉移除临床手术。如图3 所示,达芬奇手术机器人具有良好的3D 视野、机械臂操作更加平稳以及移动范围更大等优点。

图3 达芬奇手术机器人控制平台
从目前的发展趋势来看,国外的眼科手术机器人如数百万美元的系统——达芬奇主/从机器人,在商业上是成功的。然而,眼科手术机器人的未来可能不再是这种类型的系统,而是小型、低成本的外科机器人,为医疗经济带来巨大价值。其中,一些装置从仿生学中寻求灵感,生物灵感类似蛇形结肠镜机器人和类似黄蜂的产卵器这样的装置已经在研究环境中得到了证实,它们可以穿透组织到达目的地。
1.2 国内研究现状
2009 年,北京航空航天大学联合首都医科大学附属北京同仁医院和北京市眼科研究所,研发了一款辅助角膜移植显微手术机器人,如图4 所示。该机器人包含视觉系统、控制系统、力位感知系统、末端执行器、自动缝合机构6 个子系统,可准确完成手术操作,是我国角膜移植手术机器人的雏形[13-14]。
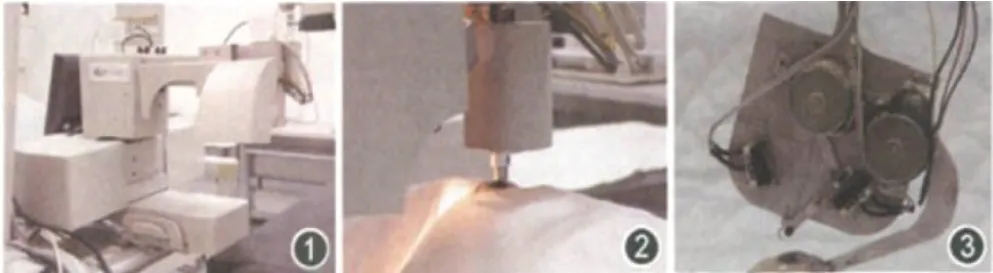
图4 角膜机器人整体外观
2014 年,沈丽君教授联合北京航空航天大学杨洋教授等研发了视网膜血管搭桥手术机器人系统,对视网膜表面平行运动进行了轨迹规划和仿真,并基于乒乓球模型进行了可行性分析实验,未来仍需通过用动物实验做进一步的研究[15]。
2017 年,沈丽君教授联合北京航空航天大学专家,共同研制一套辅助玻璃体视网膜显微手术机器人系统,如图5 所示。该系统具有5 个可握持眼科常用手术器械的机械臂,医生通过控制器操控机器人两个机械手臂的运动路径,成功完成了对15 只离体猪眼的玻璃体切割和玻璃体后脱离手术[16]。
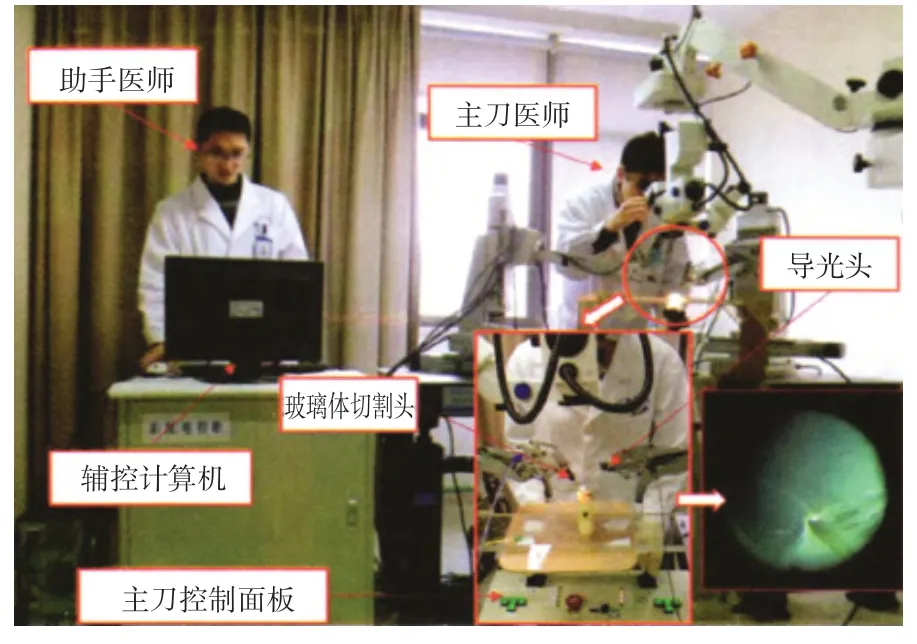
图5 机器人系统辅助下的玻璃体切割手术示意图
国内眼科显微手术机器人的研究起步较晚,与国外的发展水平有一定的差距,距离临床应用还有一定的距离[17]。目前发展趋势是:在追赶达芬奇机器人商用脚步的同时,朝着仿生设计、柔性设计、多功能、小巧灵敏的方向前进,这一点与国外的思路基本相同,但是在短时间里还离不开主/从控制操作系统实现自动智能手术。
2 本文研究内容
结合如上国内外相关技术研究现状分析,本文围绕黄斑裂孔眼科手术临床存在的“险”、“难”、“盲””、累”等技术挑战,提出如图6 的总体研究技术路线。
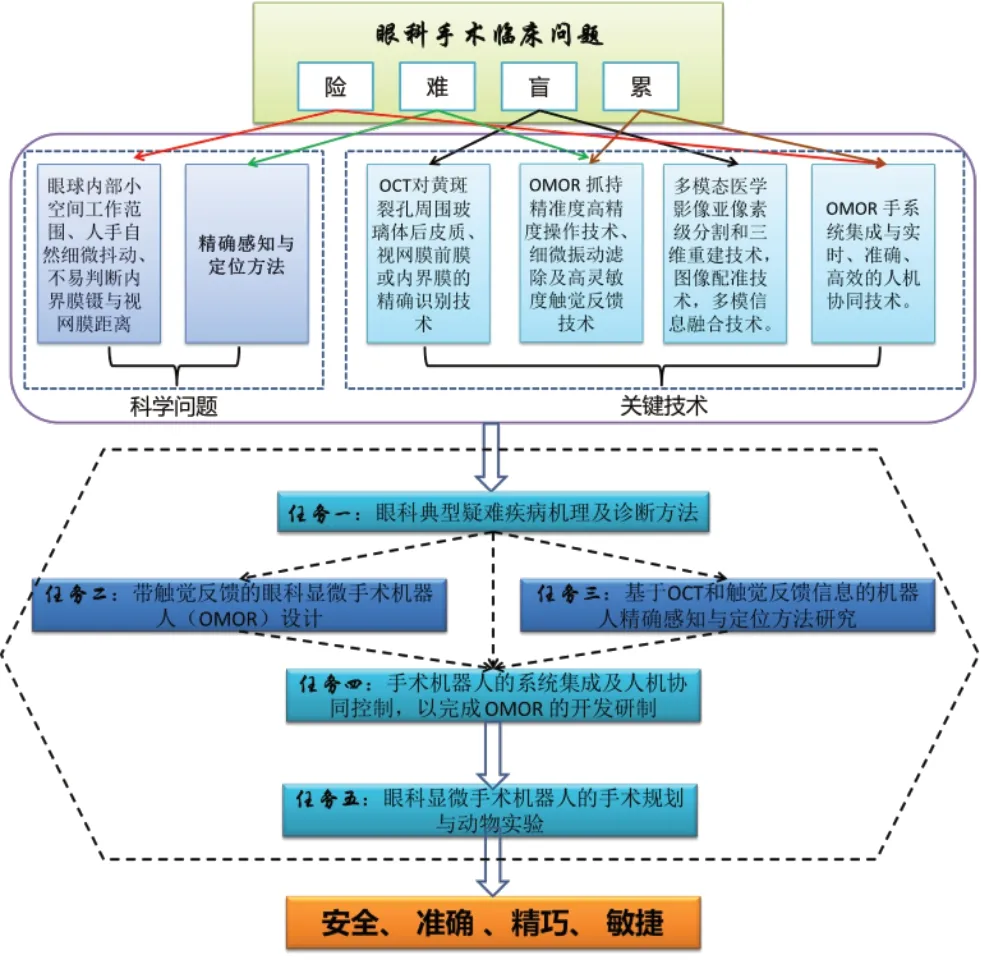
图6 研究的总体技术路线
根据上述技术路线,笔者对该种眼科显微手术机器人(OMOR)的主要研究内容对应如下。
2.1 眼科典型疑难病机理及诊疗方法
要实现在手术中介入先进的检测手段和机器人技术,研究人员就必须从生理学入手深入研究黄斑裂孔等眼科典型疑难疾病机理,以寻找先进的检测手段研究其在线智能检测诊断方法。
特发性黄斑裂孔(IMH)是指眼部无明显相关的原发疾病如外伤、玻璃体视网膜病变及其他疾病而发生的黄斑裂孔。其起病隐匿,病程进展缓慢,早期无明显症状,随着病情的发展,患者常出现中心视力下降、视物变形等临床表现[18]。IMH Ⅰ期及Ⅱ期的主要发病机制是随着年龄增长,发生玻璃体后脱离(PVD),而PVD 最初主要发生在黄斑区,中心凹粘连紧密的玻璃体前后方向的牵拉导致出现中心凹的劈裂和假性囊肿的形成,即IMH Ⅰa 期。若牵拉力持续存在,导致神经上皮层的破裂,裂孔即进入Ⅰb 期或者Ⅱ期。而Ⅲ期及Ⅳ期的主要原因是Müller 细胞和神经胶质细胞等细胞成分,移行至内界膜表面后转化为纤维细胞,甚至形成黄斑前膜。它们对黄斑裂孔产生切线方向的牵拉,从而导致了裂孔的继续扩大[19]。玻璃体切割术是特发性黄斑裂孔患者的首选治疗手段,已经得到大家的公认。目前,最常用的手术方式是经睫状体平坦部玻璃体切割术联合视网膜内界膜剥除。对于巨大的黄斑裂孔、时间较长的黄斑裂孔及术后不能长时间保持俯卧位的黄斑裂孔患者来说,剥除内界膜有利于术后的恢复。一般认为,对于Ⅰ、Ⅱ期的IMH 患者,如果需要手术治疗,可以只做玻璃体切割术,不需要做内界膜剥除;对于Ⅲ、Ⅳ期的患者,则必需进行内界膜剥除。
2.2 带触觉反馈的眼科显微手术机器人(OMOR)设计
为解决手术中医生面临的“难”、“累”的问题,并且检测环境中的力信息反馈至主手,使操作者获得较好的力觉临场感,就必须深入开展带触觉反馈的眼科显微手术机器人(OMOR)设计研究。如图7 所示,该研究首先分析机器人手臂的工作环境、工作状态及功能要求,设计机械臂的执行结构并建立对应的三维模型,同时根据工作条件的需求,仿真计算机器人手臂的工作空间大小、活动角度范围、自由度大小;然后研究提高机器人手臂工作精度、轨迹精度的理论方法,优化现有控制算法,并且研究触觉反馈的机理以及提高触觉传感灵敏度和精度的方法;最后进行振动滤除和手术机器人手臂的仿生刚柔软设计,建立机械臂硬件系统进行仿真验证。
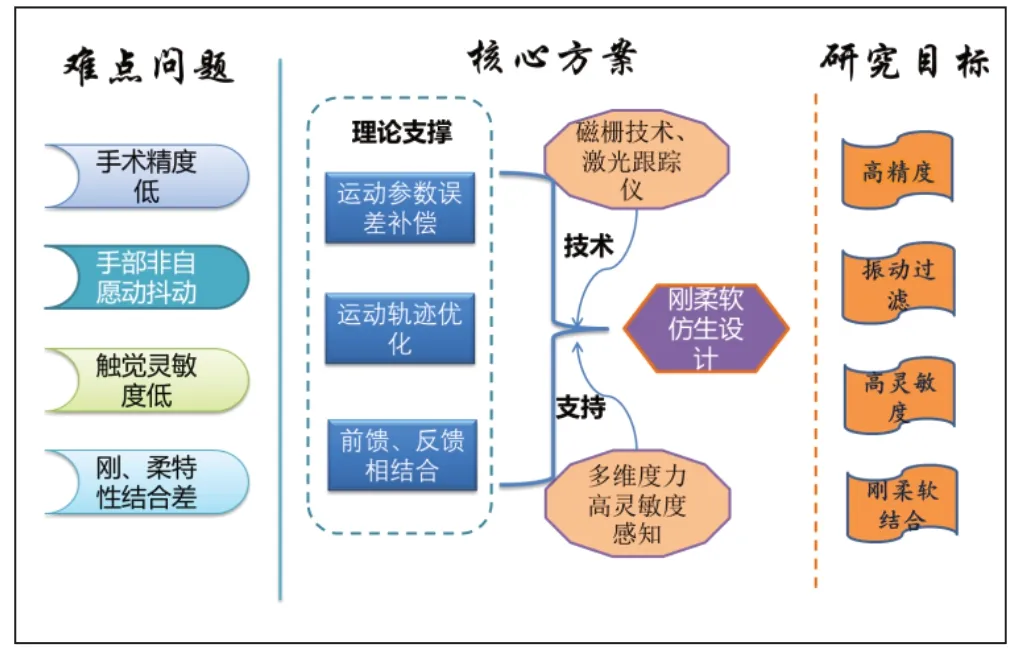
图7 带触觉反馈的眼科显微手术机器人(OMOR)设计方案
2.3 OMOR 机器人精确感知与定位方法研究
为降低手术的风险程度以及并发症产生的机率、解决手术中“盲”与“险”的问题、提高手术的精度,就必须深入开展基于OCT 和触觉反馈信息的机器人精确感知与定位方法研究。如图8 所示,该部分主要研究多模态医学影像分割和OCT 图像三维重建技术,构建眼球三维模型,确定虚拟术区边界,构建术前手术规划系统。
本研究主要融合OCT 图像、FAF 图像(患者眼底自发荧光图像),然后利用图像三维重建技术建立眼球的三维模型,确定安全的手术区域,生成虚拟手术边界;构建术前手术规划系统,确定病灶在眼球三维模型中的坐标,规划机械手的运动轨迹和手术过程。研究术前与术中图像的准确配准技术,实现手部的抖动滤波和定位误差自动补偿,将术前规划、虚拟约束引入术中;精确定位病灶。本研究结合视觉反馈和触觉反馈的多模信息融合技术,实现机器人的精确感知,实施精准手术;保证术中不会对视网膜造成二次伤害。
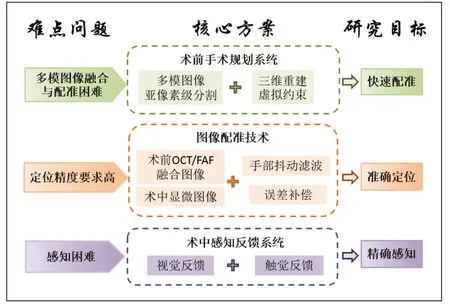
图8 基于 OCT 和触觉反馈信息的机器人精确感知与定位研究方案
2.4 手术机器人的系统集成与人机协同控制
为实现医生与机器人的协同控制与整个手术系统集成,本部分结合OMOR 机械臂、信息采集与处理系统及智能决策与控制系统,实现OMOR 手系统集成;基于主从遥控制系统、触觉反馈及低频飘移过滤的工作机理,搭建具有“人—机—环境”融合特征的人机智能协同系统的应用技术平台与典型示范,如图9 所示。
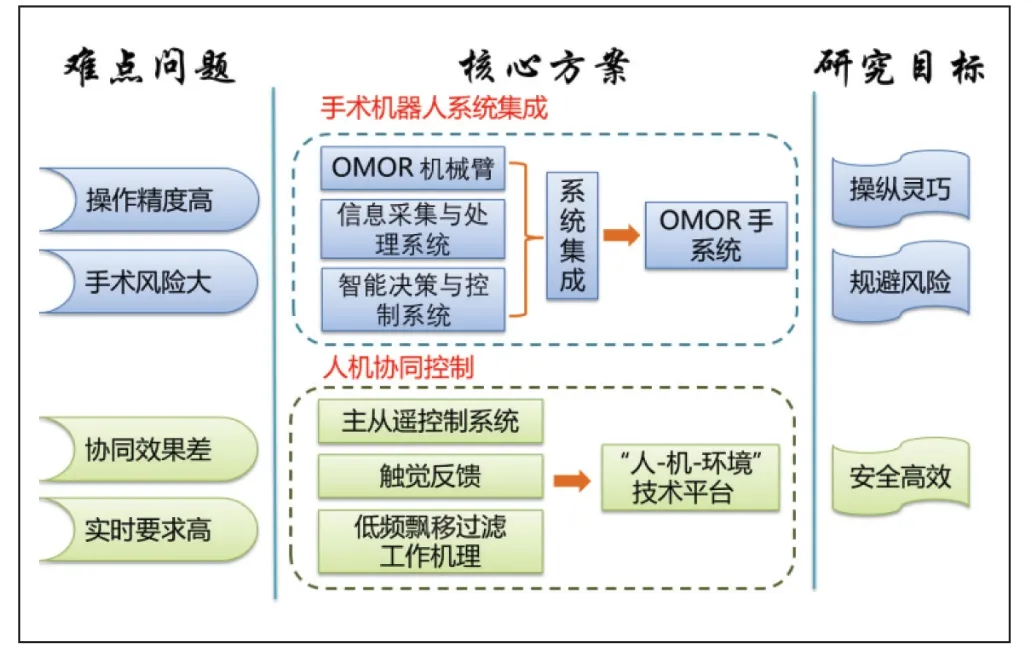
图9 手术机器人的系统集成及人机协同控制研究方案
2.5 手术规划与动物实验
为建立眼科显微手术机器人操作术前、术中和术后的安全性与有效性评估体系,首先需要建立包括术前规划、术中操作、术后康复等一系列的机器人手术操作流程及规范。如图10 所示,手术规划与动物实验部分将由具有丰富视网膜手术经验的医生进行动物实验,从初级的视网膜内界膜模拟物剥除、一般哺乳类动物视网膜内界膜剥除到高级灵长类动物视网膜黄斑裂孔模型的内界膜剥除共三个层级的动物实验,探索眼科显微手术机器人的实用性、精准性和智能协同性。
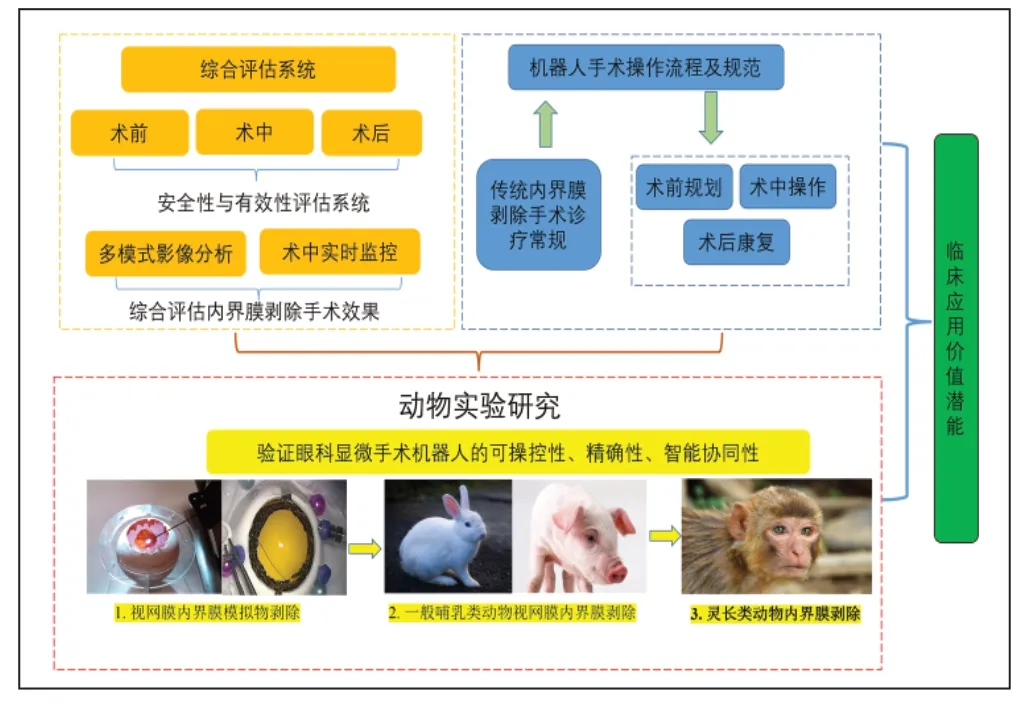
图10 眼科显微手术机器人的手术规划与动物实验方案
3 拟解决的关键技术
根据以上的研究技术路线和主要研究内容论述,不难发现,该眼科显微手术机器人的开发必须要解决的关键技术如图11 所示。
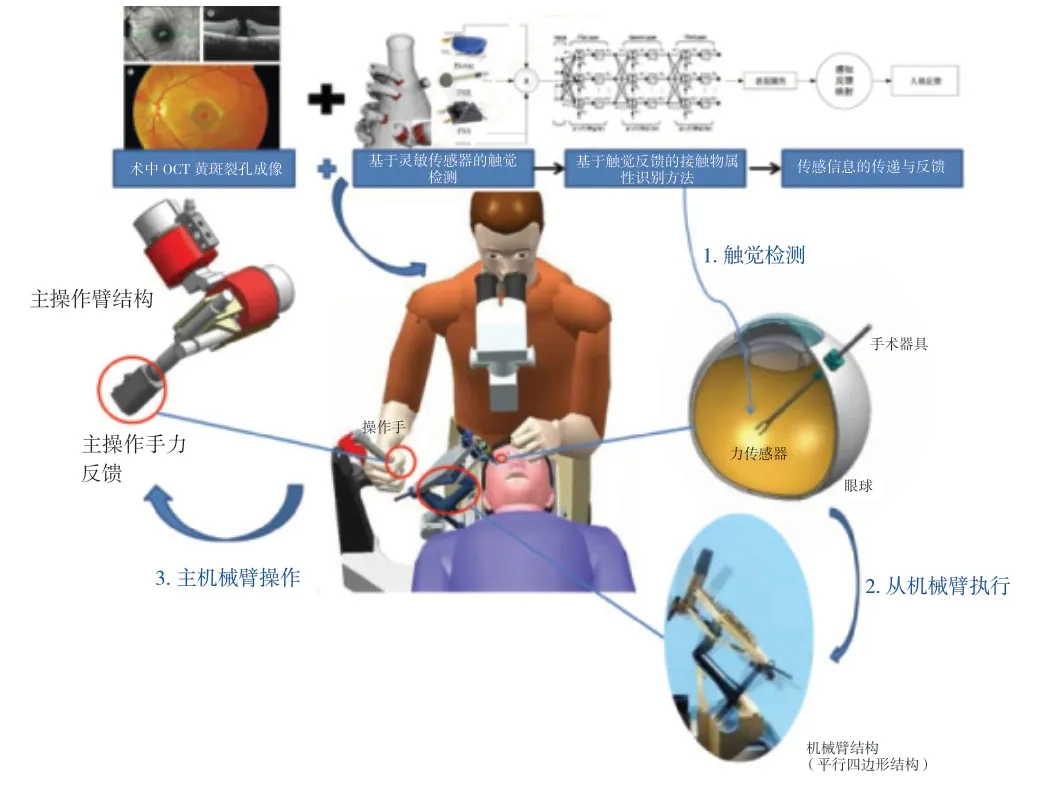
图11 眼科手术机器人关键技术研究示意图
3.1 OMOR 手术机器人刚柔性设计
目前眼科手术机器人存在触觉灵敏度低、刚柔软特性结合差的问题,限制了眼科手术机器人主操作手的触觉临场感和机器人本体的灵活程度。对此,应研究触觉感知、反馈及传感的方法以提高传感器的灵敏度和手术机器人主操纵手的力觉临场感,同时研究补偿机械连杆的运动学参数误差的理论方法,通过提高减速器刚度及机器人本身设计刚度补偿关节柔性及连杆柔性,提高机械零点标定功能。同时将前馈控制和反馈控制相结合来抑制医生手术时非自愿运动,如低频震动、急促和低频漂移的滤除。
本研究仿生设计的理论和方法,以手术机器人观人的手臂活动作为技术创新设计的依据,通过相似原理、系统理论、创新原理等相互结合,以抽象思维、全局观点、综合方法实现技术产品的创新设计;并且,在设计过程中,选择生物性能接近的、可降低能耗、增强效率的仿生材料、刚度特性好的刚性材料和柔软特性好的柔性材料;安装具有极高灵敏度的6 维力传感器,检测环境中的力信息并反馈至主手,从而使操作者获得较好的力觉临场感。
3.2 机器人精确感知与定位
眼科手术机器人除面临上述问题,还存在手术精度低的技术难题,为了提高眼科显微手术机器人的操作精度和响应速度,本机器人的开发应解决精确感知与定位方法的关键技术问题。
定位方法的关键在于获得高分辨率的图像并建立眼球的三维模型。现有的眼病诊断标准都是基于OCT 成像,目前的OCT 成像分辨率还无法满足机器人的精确定位要求,所以应研究OCT 成像分辨率的影响因素及提高办法,这是一关键技术。
对比分析OCT 水平、垂直、环形、放射状以及不同角度的线性扫描方式的优缺点,根据眼部病变的部位、性质选择设计合适的扫描方式。本研究建立手术虚拟边界的核心技术问题,提高视觉反馈的分辨精度。当手术镊在视网膜表面运动时,需要通过图像处理技术实时显示手术镊距离视网膜的距离,同时还需要z 轴调整补偿眼睛的曲率半径,从而防止手术镊在横向运动时无意中碰到视网膜。当手术镊和眼球组织接触时,要求有触觉反馈,同时还必须利用信息融合技术融合视觉信息和触觉信息,实现对手术过程的精确感知。
3.3 手术机器人系统的人机协同控制
提高“从”随“主”的响应速度、工作灵敏度与精度、提高人机协作系统的稳定性与安全性、减轻操作者劳动强度、增强操作舒适性的关键是解决人机协同中的核心控制问题。本文研究主从遥控制理论,研究触觉反馈的工作机理,安装具有极高灵敏度的6 维力传感器,检测环境中的力信息并反馈至主手,从而使操作者获得较好的力觉临场感;融合视觉反馈信息和触觉反馈信息,在手术过程中,可通过OCT 摄像头获得从手四周的三维环境,为医生操作从手提供更为精确的局部图像;研究低频飘移过滤的工作机理,过滤手部固有的、无意识的生理颤振信号对OMOR 手末端执行器的影响,提高系统的稳定性。为了预防操纵过程过大加速度或不连贯动作,保证系统的稳定性,研究眼科手术机器人控制的原理方法、人机协同智能控制原理和系统集成的方法都是完成人机系统的集成与控制的难点和关键所在。
4 结论与展望
本文在详细阐述分析国内外相关研究现状的基础上,围绕黄斑裂孔眼科手术临床存在的“险”、“难”、“盲”、“累”等技术挑战,提出眼科显微手术机器人(OMOR)开发的主要研究内容和拟解决的关键技术,得出如下结论。
1)具有高抓持精度的小型机械手的创新设计,是目前眼科显微手术机器人研究的主要内容。将目前现有机械手抓持精度提高,同时通过相似原理、系统理论、创新原理等相互结合,以抽象思维、全局观点、综合方法可实现仿生刚柔性设计;进行振动滤除并提高机器人手臂触觉反馈灵敏度及精度,可以达到mN 级;无需使用内界膜染色技术,避免染色剂对视网膜的毒性作用,同时手术机器人操作的精度和准确性提高,可降低甚至避免术中操作对视网膜的损伤。
2)多信息拾取与融合的手术区精确感知和病灶准确定位技术是目前眼科显微手术机器人研究的关键技术。针对眼科手术术区狭小(6cm3),定位精度要求高(<25m)以及感知困难的问题,采用多模图像信息、三维重建技术、图像配准技术和多传感器信息融合技术,以实现机器人对手术区的精确感知和病灶的准确定位,与传统OCT 相比,该方法缩短了扫描时间,获得了更高分辨率的眼底3D 成像、更少的运动伪像。
3)手术机器人系统高度人机协同控制技术的研究至关重要。考虑到眼科手术风险大、精度高及人机协同实时高效的要求,结合OMOR 机械臂、信息采集与处理系统及智能决策与控制系统,能够实现OMOR 手系统集成;同时,基于主从遥控制系统、触觉反馈及低频飘移过滤的工作机理,可以搭建具有“人—机—环境”融合特征的人机智能协同系统的应用技术平台与典型示范。
4)医生手术时非自愿运动,如震动、急促和低频漂移的滤除技术研究,也是目前眼科显微手术机器人研究的难题。提高主从控制中“从”随“主”的响应速度、工作灵敏度与精度,应采用高性能的传感器技术来实现主从手间的力觉反馈。
综上所述,眼科手术机器人的未来功能与结构不再是像达芬奇手术机器人一样系统庞大、价值昂贵,而是体型较小、成本较低、功能类型特定的一种眼科手术机器人。同时,未来手术机器人操纵臂从仿生学的设计出发,结合刚柔性的理念,实现小范围、高精度、零延迟、高智能的操作控制系统。对于重复单调工作,打破主从控制的传统人机协同的控制方式,实现结合神经网络控制、专家系统控制、机器学习控制以及遗传算法控制等各方法优点的智能自动控制系统,解放医生的双手,减少手术时长,遏制术后的再次发病率。
眼科显微手术机器人临床应用必将是大势所趋。此相关领域的研究能够促进眼科医疗领域的进步,为医疗经济带来巨大价值,满足众多眼部疾病患者的需求,为提高眼部疾病治疗的成功率、降低康复过程复发率提供技术可能,对优化社会结构与环境等方面具有重大作用。
猜你喜欢
海外星云(2021年6期)2021-10-14 07:20:42
保健医苑(2019年5期)2019-05-15 01:07:34
特别健康(2018年3期)2018-07-04 00:40:20
中华胃食管反流病电子杂志(2017年2期)2017-10-27 01:47:16
中华胃食管反流病电子杂志(2016年1期)2016-10-19 08:25:12
工业设计(2016年4期)2016-05-04 04:00:20
济宁医学院学报(2014年4期)2014-08-16 13:44:19
中外健康文摘B版(2014年8期)2014-06-27 06:33:03
河南医学研究(2014年4期)2014-02-27 14:52:19
河北医科大学学报(2011年8期)2011-03-25 10:16:53