人工智能科学在软土地下工程施工变形预测与控制中的应用实践
——理论基础、方法实施、精细化智能管理(示例)
2020-03-09 09:09温海洋
隧道建设(中英文) 2020年1期
孙 钧, 温海洋
(1. 同济大学隧道及地下工程研究所, 上海 200092; 2. 上海市隧道(股份)集团公司院士工作室, 上海 200032)
0 引言
就隧道与地下工程而言,在岩土介质材料方面,它是一种“客观上随机性、不确定性和不确知性高,材性上离散性强;主观上则又模糊性,计算上简化近似性及任意性大”的“灰箱”问题,单凭力学手段和数值方法一般都难以达到定量决策的效果。
在城市中心城区兴建轨交/地铁,除关心工程结构自身的施工安全外,还要考虑周边环境不同程度土工病害的防治问题。
文献[1-3]论述了城市建设地下工程施工活动中的环境土工学问题,提出人工智能方法是有别于传统力学计算和数值分析的另一种对施工变形预测与控制的有效手段。分别以地铁车站深大基坑开挖施工和地铁区间隧道盾构掘进为例,介绍了在几处工程现场所做的施工变形智能预测与控制的示范性应用。文献[4-6]采用人工智能神经网络和模糊逻辑法则等手段,对地铁车站深大基坑和地铁盾构施工中的土体变形以及土工环境问题进行智能预测;在变形达到规定限值之前,通过变形控制的模糊逻辑智能方法,藉调整地铁施工诸技术参数,达到合理控制施工变形的目的。我团队1年来通过多处工程项目的应用实践,认为: 就我国广大软土地区而言,如因施工变形过大,随地铁车站深大基坑开挖/区间隧道盾构掘进施工进展,可藉调整各相关施工技术参数施行变形超限后的智能控制策略,可将变形始终约束在规定的阈值范围之内。本文主要对建议的人工智能方法和地下车站等深大基坑以及地铁盾构施工变形智能预测和控制案例进行介绍,说明其采用优点。同时,简要介绍了已研发的盾构掘进施工中工程周边地表沉降/隆起变形的多媒体三维动态可视化仿真程序软件及相应的计算机智能技术管理系统,这些均在应用中获得了实效,并有相当的创意和进取。
1 基于人工神经网络的智能预测方法
当前,许多重大工程在施工中均有海量的(大数据)、系统的变形监测数据,利用已编制好的、由这些监测值组成的工程监测数据库和当地地质、水文资料库制作“样本”,以提供作为搜索、查证、咨询和调用,并作为采用智能化分析时的基础输入数据。这就构成了对工程结构变形位移和周边地表沉降/隆起值进行预测、分析、判断和控制的一种有别于数值模拟而另辟蹊径的软科学手段与方法。
利用人工神经网络可以很好地模拟人脑的思维和推演功能,且因该法具有自适应性和容错性良好的特点,能够从已建工程前一时段(2~3个月前)监测到的数据,采用笔者建议的多步滚动预测法智能化手段,预测3~5 d将要发生的结构变形位移和周边地表沉降/隆起的定量值。相对于传统的信息化施工而言,可视为一次更高层次的技术提升。
1.1 人工神经网络智能预测(多步滚动预测法)的实施
人工神经网络结构示意见图1。

图1 人工神经网络结构示意
现对图1所示的工神经网络自左向右的3个层面展开说明。
1)第1层(左首层)为输入层。对此处讨论的施工变形智能预测问题而言,将输入以下基础数据: 测点y1及其周边各测点(y2,…,yn)早前时刻已测得的变形值,即:y1(t),y1(t-1),…,y1(t-n);y2(t),y2(t-1),…,y2(t-n);yn(t),yn(t-1),…,yn(t-n)。
2)第2层(中间层)也称隐层。这是人工神经网络发挥其自学习和自适应性功能强的关键一层。它将左首输入层所示的相应各测点及其在不同时刻的历时变形变化——与其变形速率联系为一体,进而可根据人工神经网络输出各测点下一时刻相应各值的发展变化。人工神经网络的具体实施,可参见其他有关专著或笔者早年已见刊的论述[1-5],此处不再赘述。
3)第3层(右首层)为输出层。将中间隐层相应各测点变形值的历时变化及其在输入层所测时刻t及之前各时刻(t-1,t-2,…,t-n)已测得的相应各变形值,通过人工神经网络的学习和训练,可在图中右首层经预测得出后一时刻(t+1)所对应的相应各测点的智能预测值,即:y1(t+1),y1(t+2),…,y1(t+n)和y2(t+1),y2(t+2),…,y2(t+n);……。依此类推下一时刻及其他测点后续各个时刻、各个测点智能预测值的后续历时变化。

本文建议采用多步滚动预测法的流程框,见图2。所谓“多步滚动”,是指不是一次性预测很长时间(如后续1个月)的变形值,而只是预测后续3~5 d的变形值;随着预测时间的逐次向前推移,先前用到的、已预测过变形的日期将始终维持在2~3个月,即每天逐次将最前记录已测变形值的时间删除1 d。此予说明。

图2 多步滚动预测法流程框图
1.2 基于智能模糊逻辑的施工变形控制的实施
借用模糊数学中“隶属度”的概念,先通过“递阶/层次分析法”对地铁车站基坑开挖/区间盾构掘进诸有关施工技术参数(这些参数与变形值间不同程度的相关性、先已按层次分析法逐个得出,另见本文第1.3小节)进行敏感度分析;据已得出的各不同施工技术参数在变形值超限时作必要调整、变化后,按其对施工变形影响因子和影响程度大小(即按其对后续变形的重要性)进行排序;进而在施工变形达到超限阈值(该值先按行业规定拟定好)之前施加智能模糊逻辑控制(即调整诸有关施工技术参数,可使施工变形能始终约束在规定的相应限值之内)。智能模糊逻辑控制系统框图见图3。盾构掘进变形智能控制运作框图见图4。
1.3 测试样本的机器学习与演练
用上述智能方法取得预测和控制成效的关键在于: 1)要先选取测试“样本”,并对其进行“深度学习”(采用BP人工神经网络方法),即: “学习”、“训练”、“测试”和“演练”; 2)编制相对庞大、详尽的工程监测数据库和当地沿线的地质、水文资料库。
选取多组“样本” ,要求通过机器的深度学习。含: 数据、信息的采集,训练和测试,最后再通过演练确认正确无误,使之起到样本的作用。
“样本”的组别,大体可分为: 1)复杂的地质、水文条件; 2)复杂的施工条件(如: 盾构进出工作井、交叠盾构隧道、超浅埋暗挖掘进、超深大基坑,等等); 3)复杂的城市环境维护条件(含: 紧贴坑周有需保护的浅基民居和老旧建(构)筑物、盾构下穿桩基、邻近有已建/在建建(构)筑物,或遇有国家一、二级保护历史文物,等等)。

图3 智能模糊逻辑控制系统框图

图4 盾构掘进变形智能控制运作框图
采集“样本”,其输入的主要参数需按对结构施工变形、附近地面沉降/隆起值的影响程度,采用递阶分析和敏感度层次分析方法,进行层次排序,对基坑和盾构,可分别按层次先后列出。
1)对基坑开挖施工
①分层开挖深度;②沿纵向开挖步长;③先撑后挖/先挖后撑;④横向对撑是否施加预压应力(扁千斤顶);⑤坑土无支撑暴露时间;……。
2)对盾构掘进

2 人工神经网络智能预测与控制案例
2.1 基坑施工变形智能预测与控制实施案例
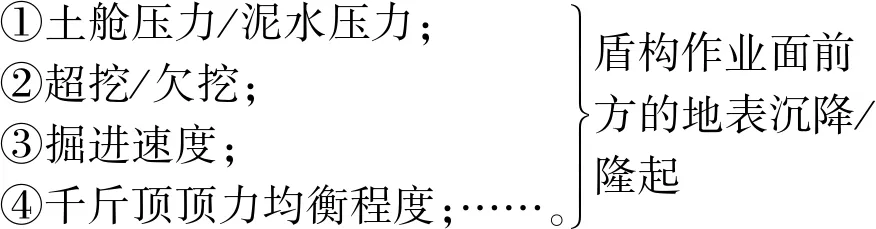
某悬索跨江大桥锚碇深大基坑,地下墙体深部为嵌岩,基坑支撑平纵面布置见图5。地下墙结构墙体水平位移实测与智能预测值的对比示例见图6。
(a) 基坑内支撑平面布置图 (单位: mm)

(b) 地下连续墙槽段展开和基坑支撑纵剖面图 (单位: m)

图6 基坑墙体水平位移随深度变化的实测与智能预测值的对比示例
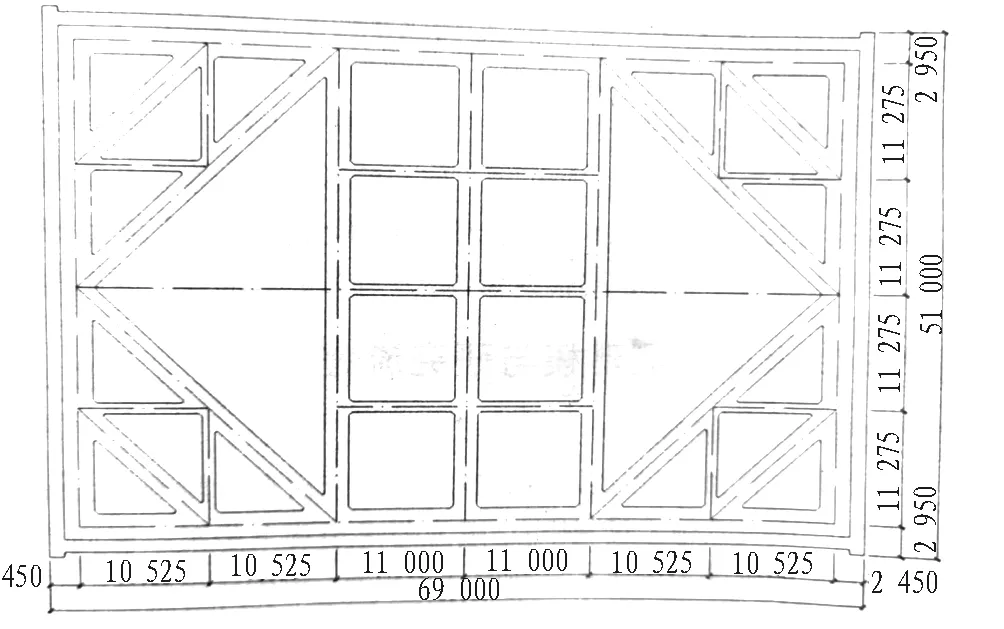
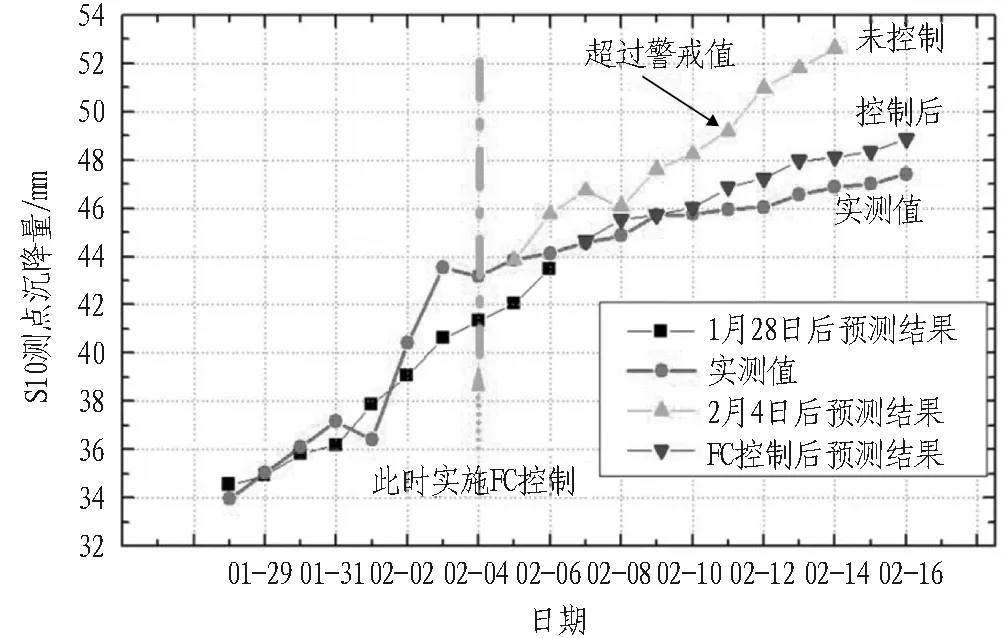
大桥锚碇深大基坑在施工开挖过程中地下连续墙体的水平位移和坑周地表沉降实测与智能预测值的对比示例见图7—8;采用智能模糊逻辑法则进行变形有效控制的效果示例见图9—10。由各图示例可见,智能预测与控制的精度均达到了工程设计要求,精度十分满意,但对土体沉降后期的预测精度(图8中,2月2日以后的预测值)则稍差,从现代土力学对沉降变形做计算预测的机理来看,也是可以理解的。

图7 基坑墙体水平位移历时增长变化的实测与多步滚动智能预测值的对比示例(2002年)

图8 坑周地表沉降历时变化的实测与多步滚动智能预测值的对比示例(2002年)
FC指模糊逻辑控制。
FC指模糊逻辑控制。
2.2 盾构掘进施工变形智能预测与控制实施案例
为了制定盾构掘进诸施工技术参数与沿盾构走向地表沉降/隆起变形值间的经验关系,需先行制作上述测试“样本”,并按设定的主要施工技术参数在盾构试推进阶段对各台盾构逐一经现场试推测试确定。盾构掘进的经验已证实: 1)对盾构作业面前方,影响地表沉降/隆起变形最主要的参数是“舱压”和“盾构掘进速度”; 2)在管片脱出盾尾后,影响后方地表早期沉降/隆起变形最主要的参数则是“同步注浆量”对“盾构与管片间建筑空隙的填充率”和若有“注浆滞后时的滞后时间”。不同盾构的这些参数都需在盾构试推进阶段逐个实测确定,不能用其他盾构的相应各值代替。
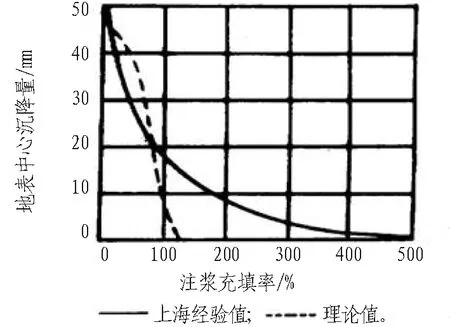
盾构试推进阶段,主要施工参数与盾构后上方地表纵向中心沉降量间的实测关系曲线见图11。
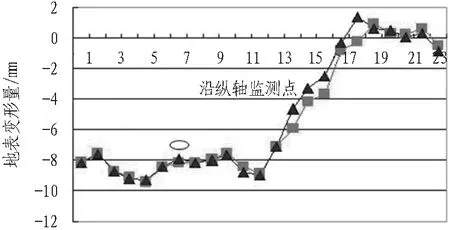
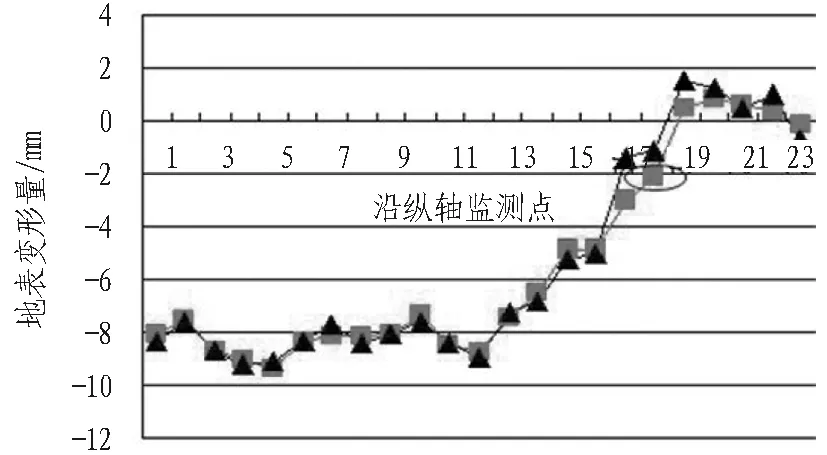
在盾构掘进中,沿隧道纵、横向作业面前、后方地表隆起/沉降变形曲线的智能预测与相应实测值的对比示例,分别见图12—15。
早前,盾构施工变形控制采用传统的人工控制策略,见图16。现在改用了智能控制,可见两者过程基本一致,说明电脑仿真效果与人脑的一致。

(a) (b)
(c)
3 智能方法的优点和特色
从笔者所在研究团队(智能科学课题组)多年来所做的工作中认识到: 上述智能化方法已被业界誉为是一项“高一层次的信息化施工变形预测与控制工法”。该法的优点具体体现在: 不只是可以了解到当天已经发生了的信息;还可预见3~5 d将要发生的变形位移和沉降/隆起等的预测定量值(若在早前,对明后天的情况则只能根据今天已测得的信息凭以往个人经验来做推断和预测);必要时采用智能模糊逻辑控制,在施工变形达到超限阈值之前,通过有序地调整相应的施工技术参数,即可使后续变形始终处于允许的限值之内。
这里,只需调整有关施工技术参数(有了3~5 d的时间,便于施工方做出反应和应对),而无需再采取其他附加措施(如: 补充灌、注浆,增作预支护,预加固等)。有了专用程序软件和相应监测与地质、水文数据,该法操作性好,且方便、有据。
智能方法的优越性及其创意特色,主要可归结为:
1)预测变形的精度远高于用数值方法,一般与实测值的误差仅为5%~10%,能完全符合工程要求;
2)当预测变形超限时,只需按施工变形控制手段作相应的施工技术参数调整,而无需其他的额外花费,节约造价又节省工时;
3)便于主要技术负责人做远程、无线、视频操作实施,并及时决策是否需要下达调整指令;
4)远程、无线、视频监控,不受恶劣气候条件的影响,可远在异地工作室内及时完成上述施工监测与控制,大大改善了工作条件。
(a) 5月19日上午地表变形曲线
(b) 5月19日下午地表变形曲线
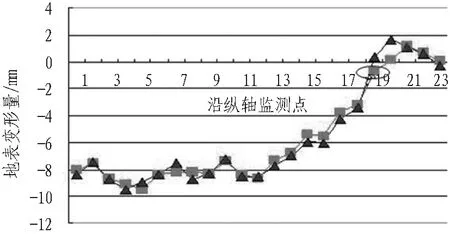
(c) 5月20日上午地表变形曲线

(d) 5月20日下午地表变形曲线
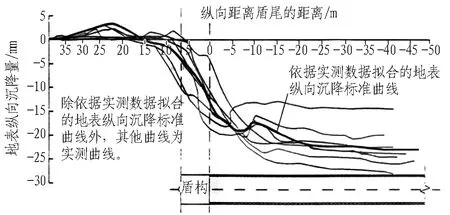
(a) 依据实测数据拟合的标准地表纵向沉降曲线

(b) 地表纵向沉降实测值与预测值对比

(a) 地铁盾构隧道线路剖面图

(b) 土体横向沉降预测值与实测值对比
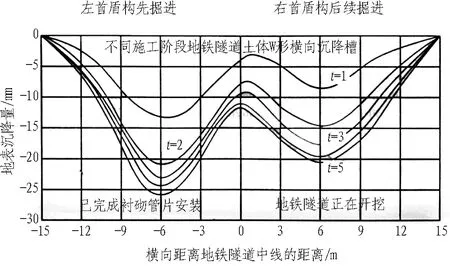
图15 上、下行双向盾构先后掘进时,土层横向沉降槽智能预测值的历时变化示例

图16 早前,盾构施工变形控制采用传统的人工控制策略(供与智能方法控制作比较用)
4 盾构施工网络多媒体图形图像仿真精细化智能技术管理的实施
1)初步实现了操作、掌控、系统维护和通信等多功能于一体的综合集成智能技术管理。盾构各施工现场通过网络进行智能技术管理的基本模式,见图17。
2)在盾构施工监控系统的研发方面,已可基本实现以下各项功能: ①现场实景监控;②高速、高质量的数据与图像传输;③盾构施工计算机技术管理软件,自学习、自动诊断和遇紧急情况时自动处理;④能预测和模拟施工开挖、支护各工况的变形控制并具有分别调整各有关设计施工参数的功能;⑤从工程危象险情预报及其控制的各安全管理值,可具备选取相应对策与有效技术措施(主要指调整盾构施工参数)的功能。
3)在各子项研制过程中,已初步解决了若干关键技术: ①将各种高端科技综合集成于一体,并能较成功地应用于本系统;②图形数据对象的处理技术;③人工神经网络智能控制方法的采用;④盾构施工过程中的三维动态可视化仿真模拟;⑤决策库的设计与建立;⑥各子系统的综合集成。
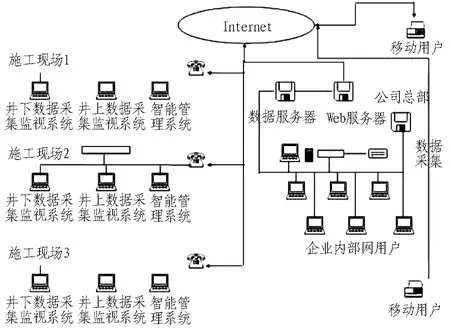
图17 盾构各施工现场通过网络进行智能技术管理的基本模式
4)研究中的若干创意: ①将网络多媒体视频监控技术综合集成于一体,并应用于施工监控与环境土工维护;②建立了盾构施工全过程的三维动态可视化人工实景仿真模拟系统以及变形控制指标体系与相应的控制标准;③研制了盾构掘进施工计算机智能管理系统大型软件包,并在盾构施工现场实践中作演示和试用,取得了一定成功。
5)在隧道和地下工程业界,盾构施工信息管理系统远程发布平台(由上海隧道工程有限公司自主研制),已在上海市沿江通道盾构施工中得到了试验性应用,取得了良好的技术效益[7];不仅使用户能够在远程端及时掌握现场施工的实时信息,还为远程用户提供了历史数据查询功能,为沿江通道工程的盾构施工提供了科学有据的技术保障。
5 结语
我研究团队因为做智能研究起步较早(1997年年初起),已采用此法先后在上海和外地的各类别深大基坑和大直径盾构的开挖、掘进作业中共获11次较成功应用,效益也十分显著。现正在样本“深度学习”和在早前采用BP神经网络的基础上,对“遗传算法”、三维可视化、BIM技术应用等多方面做进一步的深化探索和研讨。
用人工智能高新科技更新、改造传统的土木工程学科和岩土设计施工行业,在更高层次上建立新的工程智能化预测、预警和监测、监控手段,进而形成一套行之有效的工程施工变形预测与控制及其有效整治的智能技术管理方法,完善计算机现代化施工智能技术管理系统,赶超与国外先进企业的技术差距,使我国城市地下空间开发和轨交/地铁建设水平再跃进一个新的台阶,是所期待。
最近,华为推出5G技术商用和频谱军转民,进一步有力促进了人工智能的更大拓展(详见文末二维码)。
组成智能项目研究团队的主要成员,除了工程设计施工人员为主体外,还要有从事通信和网络工程、信息技术管理和计算机软件研发等多个领域的技术专家合作组成共同研究体。它是一项较大的人事系统工程,有关单位为此要尽可能组织好上述的人才技术条件。
猜你喜欢
建材发展导向(2021年22期)2022-01-18
建材发展导向(2021年11期)2021-07-28
铁道建筑技术(2021年4期)2021-07-21
考试与招生(2021年5期)2021-05-25
幽默大师(漫话国学)(2020年10期)2020-10-29
模具制造(2019年7期)2019-09-25
电子制作(2019年10期)2019-06-17
科学与财富(2016年34期)2017-03-23
娃娃乐园·3-7岁综合智能(2016年6期)2016-09-19
北京航空航天大学学报(2016年3期)2016-02-27