
双边直线开关磁阻发电系统建模与仿真研究
2020-03-06 13:40冯治岗马春燕窦银科侯向楠
微特电机 2020年2期
冯治岗,马春燕,陈 燕,窦银科,侯向楠
(太原理工大学,太原030024)
0 引 言
随着科学技术的发展和工业进程的加快,人类对能源的需求量逐年递增,导致地球上的一次能源的存储量逐渐在减少。目前,各国科学家把目光都转向新能源的研究与开发,波浪能作为一种无污染、可再生能源而备受重视。海浪发电的优点是储量大、成本低、无污染,波能发电基础设施一旦建成,可以低成本运营[1],研究海浪发电对解决目前的能源紧张问题意义重大。
传统的波能发电系统采用旋转式发电机作为能量转换机构,由于需要中间转换装置,故首先将上下浮动的波浪能转换为机械能,然后再转换成电能[2]。该发电装置结构复杂、运行不稳定、后期维护难度大,且效率相对低下。而由直线发电机组成的直驱式波浪发电系统,省去了中间转换装置,具有结构简单、易维护等优点,且效率相对较高。因此,目前研究波浪能发电的学者都将研究重点放在直线发电机本体上。
近年来,直线永磁发电机已经受到各国研究人员的广泛关注,并在永磁直线发电机方面取得突破性的成果。直线永磁发电机鲁棒性好、效率高,但制造成本高,且电机内嵌的永磁体易受海底环境影响,很难适应恶劣的工作环境[3],在一定程度上限制了其广泛应用。
为此,设计一种双边直线开关磁阻发电系统。双边直线开关磁阻发电机(以下简称DLSRG)继承了传统旋转开关磁阻发电机的特点,遵循磁阻最小原理[4-6],动、定子结构简单、坚固、每一相可独立运行[7],具有无磨损、无润滑、可以实现低速运行等优点[8]。与直线永磁发电机相比,DLSRG 动、定子均由硅钢片叠压而成,无需安装永磁体,受外界环境影响较小,可在高温、高腐蚀等恶劣环境下运行,更加适用于海浪发电。通过Ansoft Maxwell 软件设计模型,在Ansoft Simplorer 中搭建功率电路和控制电路,将Maxwell 中的DLSRG 模型导入Simplorer 中,对DLSRG 系统进行联合仿真研究。
1 DLSRG 结构及运行原理
1.1 DLSRG 结构
直线开关磁阻发电机由旋转式开关磁阻发电机演变而来,按照结构不同可以分为单边式结构和双边式结构,如图1 所示。
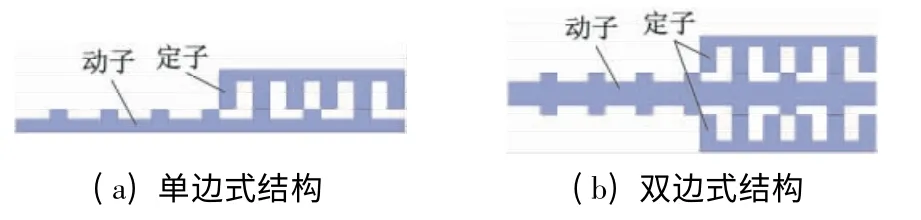
图1 直线开关磁阻发电机结构示意图
在10 A 直流励磁下,单边式结构和双边式结构直线开关磁阻发电机在运行一个发电周期内,径向磁拉力的变化波形如图2 所示。
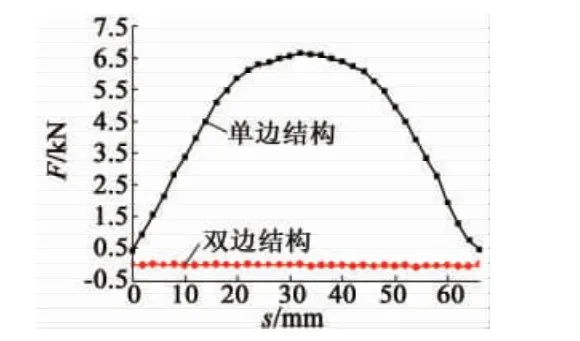
图2 径向磁拉力
由图2 可以看出:在前半周期,单边式结构发电机径向磁拉力在逐渐增大,在定子齿中心线与动子齿中心线对齐时达到了最大值为6.5 kN,在后半周期,单边式结构发电机径向磁拉力在逐渐减小;双边式结构发电机径向磁拉力在整个发电周期内在0 附近波动,且脉动较小,与单边式结构相比可忽略不计。
在10 A 直流励磁下,单边式结构和双边式结构直线开关磁阻发电机在运行一个发电周期内横向磁拉力的变化波形如图3 所示。由图3 可以看出,在定子齿和动子齿中心线对齐的位置,两种结构的发电机横向磁拉力为0,在前半周期和后半周期,双边式结构横向磁拉力值是单边式结构的2 倍。
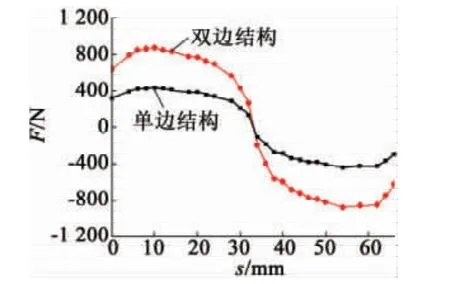
图3 横向磁拉力
通过上述分析可知,单边直线开关磁阻发电机在运行过程中径向磁拉力脉动较大,使得电机振动和噪声较大,对机械强度要求较高,严重时会影响发电机的稳定运行,降低发电机使用寿命。然而,双边式结构则与之不同,双边式在结构上对称,动子上受到的径向磁拉力可相互抵消,径向磁拉力合力脉动较小,所以DLSRG 能有效降低单边径向磁拉力影响。在同一激励源下,双边式结构横向磁拉力大于单边式结构,因此,DLSRG 在发电阶段吸收的机械能大于单边直线开关磁阻发电机。
由此可见,DLSRG 性能优于单边式直线开关磁阻发电机,采用双边式结构较为合理。
1.2 DLSRG 运行原理
DLSRG 机电一体化示意图如图4 所示。

图4 DLSRG 机电一体化示意图
S1 和S2 代表IGBT,D1 和D2 是续流二极管,U是直流电压源。DLSRG 的动子由浮球拖动上下运动,通过动子位置检测装置实现位置闭环,使得发电机在励磁和发电续流状态之间转换,当某相绕组上下桥臂的开关管导通时,相绕组中流过电流,发电机进入励磁状态,励磁结束后开关管关断。由于电感储能的作用,绕组中的电流不会立刻消失,电流会通过续流二极管向负载或者蓄电池输送电能,DLSRG的凸极效应使得相绕组成为有源线圈,工作在发电状态,向外输出电能。
2 DLSRG 发电系统仿真分析
2.1 DLSRG 发电系统建模
在Maxwell 中建立2D 有限元模型,在Simplorer中建立功率模块。发电机定子齿槽等宽,定子齿宽、槽宽、轭宽、齿高分别为33 mm,33 mm,21 mm,74 mm,动子齿宽、槽宽、轭宽、齿宽分别为33 mm,33 mm,24 mm,19 mm,绕组采用三相独立集中式绕组,该电机的额定功率为1 kW,额定速度为1 m/s,发电机动子、定子均采用DW465-50 硅钢片叠压而成。DLSRG 发电系统仿真如图5 所示。
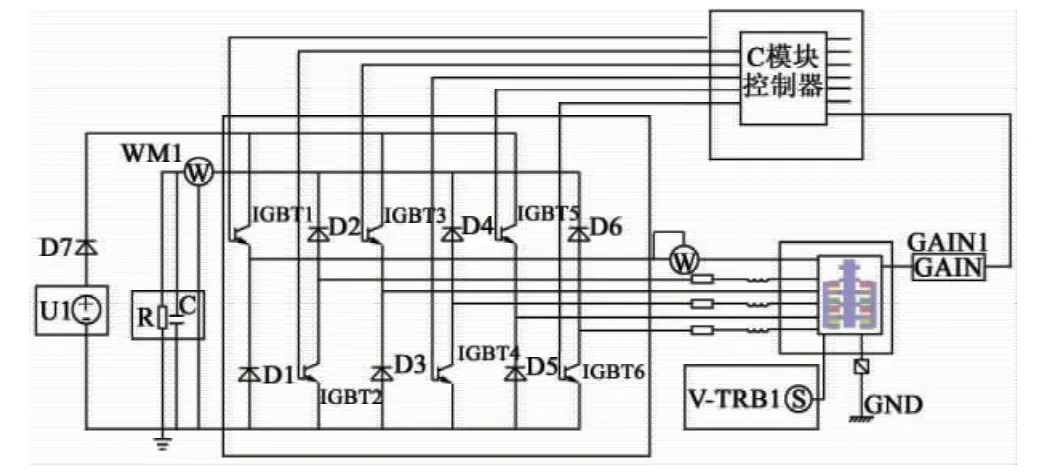
图5 DLSRG 发电系统仿真图
图5 中,主电路采用三相不对称半桥,主电路实现了相与相间完全隔离。主电路中开关元件采用IGBT,D1~D2 为续流二极管,负载端并联了滤波电容C,励磁电源端串联二极管,有效地将励磁电源和负载区分开,在一个发电周期可以看作励磁回路和发电回路。控制单元采用C 模块,在C 模块中编写程序,从而输出所需触发脉冲信号。
2.2 DLSRG 三相发电仿真分析
选取负载为10 Ω,励磁电压为100 V,选取最优开通位置和关断位置分别为18.5 mm 和49.5 mm,仿真时间设为100 ms,仿真步长设为2 ms,Maxwell和Simplorer 的仿真时间、步长保持一致,动子运动速度设为1 m/s。发电功率、励磁功率以及三相发电电压(无滤波)如图6、图7 以及图8 所示。无滤波输出量脉动较大,不能直接供给负载,因此需在负载端加储能电容,负载端并联1 800 μF 储能电容时的发电电压波形如图9 所示,从图9 中可以看出,发电电压在初始时刻迅速增长到70 V,在0.2 ~0.3 s发电电压增长放缓,在0.3 ~0.5 s 发电电压逐渐降低,在0.5 s 后,发电电压基本稳定在62 V。
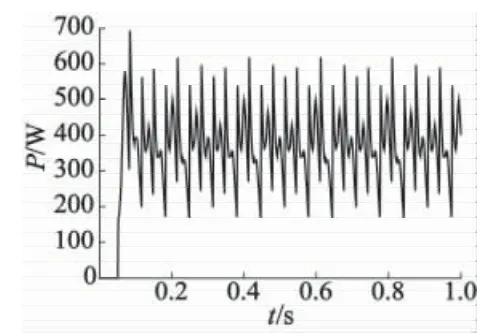
图6 发电功率
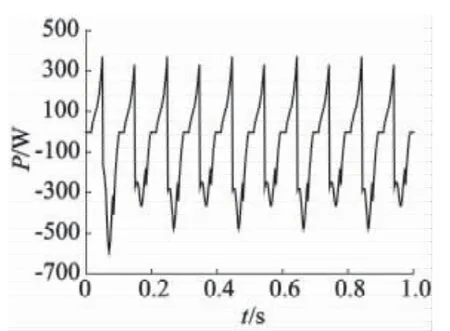
图7 励磁功率
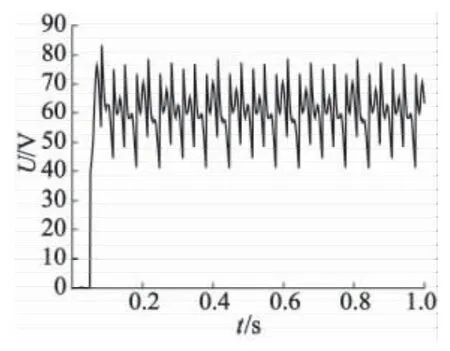
图8 发电电压(无滤波)
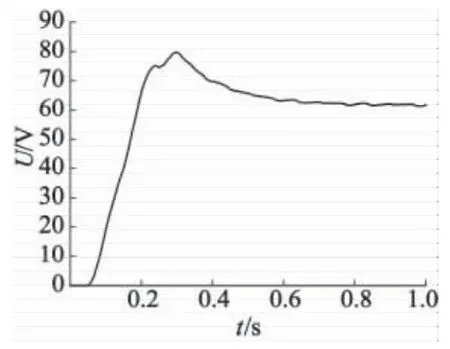
图9 发电电压(滤波)
通过上述对仿真结果的分析可知,本文的DLSRG 具有连续发电能力,可满足实际需求。
2.3 发电功率分析
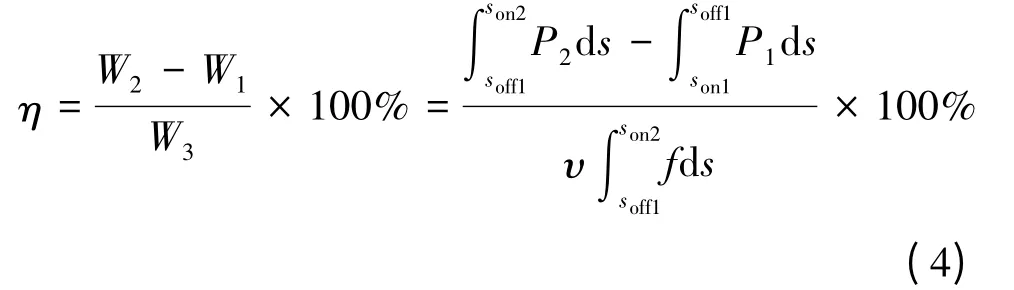
直线开关磁阻发电机一个发电周期分为励磁和发电两个阶段,对直线开关磁阻发电机进行发电仿真后,可对一个发电周期的励磁阶段消耗的电能、发电阶段发出的电能以及外部输入的机械能进行估算,进而估算DLSRG 的效率,具体计算方法如下。
(a)励磁阶段消耗电能计算方法:在该阶段,励磁电源给DLSRG 提供励磁电压时消耗的电能定义为W1,可表示[9]:

式中:P1为励磁阶段消耗的功率;ton1和toff1为DLSRG 相绕组励磁的开通时间和关断时间;son1和soff1为DLSRG 相绕组励磁的开通位置和关断位置;υ和s 分别为DLSRG 动子的移动速度和位移。
(b)发电阶段发出电能计算方法:该阶段的横向电磁力与外部机械力反向,吸收外部机械能,将外部机械能转换为电能供给负载,则负载所消耗的电能就是DLSRG 所发出的电能,定义为W2,可表示:

式中:P2为DLSRG 发电阶段输出的功率;ton2和son2分别为DLSRG 下一个发电周期相绕组励磁的开通时间和开通位置。
(c)外部输入机械能计算方法:发电阶段将吸收的机械能转换为电能,吸收的机械能定义为W3,可表示:

式中:f 为DLSRG 处于发电阶段时动子受到的横向拉力。则DLSRG 一个发电周期的发电效率如下:
DLSRG 相绕组电感曲线一个周期为66 mm,0~33 mm 属于电动励磁状态,33 ~66 mm 属于发电状态。DLSRG 动子运动速度设为1 m/s,负载为10 Ω,最优开通位置为18.5 mm,最优关断位置为49.5 mm,选取励磁电压U1为100 V。
DLSRG 某相绕组单发电周期励磁阶段消耗的功率P1随动子位移变化的曲线图如图10 所示。从图10 中可以看出,DLSRG 仅在绕组导通时消耗励磁电压,即son1为18.5 mm,soff1为49.5 mm 时消耗励磁功率。DLSRG 某相绕组单发电周期发出的功率P2随动子位移变化的曲线图如图11 所示。从图11中可以看出,DLSRG 在该发电周期励磁结束后开始发电,在下一发电周期励磁开始时停止发电,即son2为84.5 mm。DLSRG 单发电周期动子上受到的横向力随位移变化的曲线图如图12 所示。
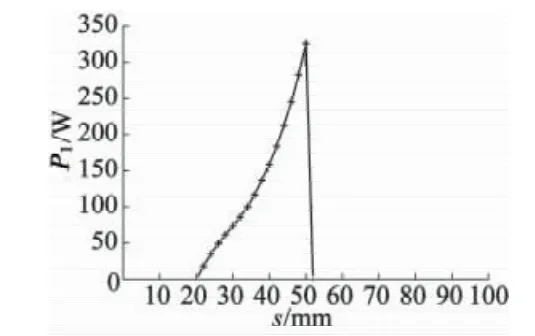
图10 DLSRG 励磁功率

图11 DLSRG 发电功率

图12 DLSRG 横向受力
通过估算可得到DLSRG 的发电效率约为80.6%。
3 DLSRG 系统控制策略研究
图13 为DLSRG 系统的双闭环控制框图,该控制策略是以发电机输出电压与给定值偏差为零为最终控制目标。双闭环控制包括电压PID 闭环控制和DLSRG 自身的位置闭环控制。图3 中,通过位置信号控制开关管的导通和关断,实现位置闭环控制;Ug是控制系统中的电压给定信号,Uf是实际测量的电压信号,二者进行偏差处理,然后通过PID 调节给出对应的PWM 信号,进而调节输出电压跟随给定值变化,当给定值为一个定值时,输出恒定电压,最终实现DLSRG 系统的恒压控制目标。
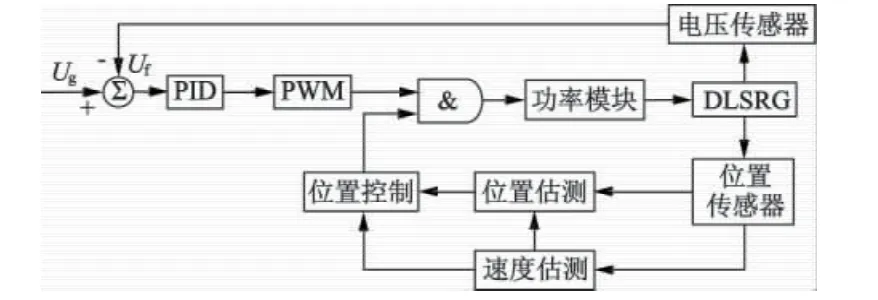
图13 DLSRG 双闭环控制框图
双闭环控制策略仿真系统励磁电压为100 V,纯电阻负载选为10 Ω,仿真步长设置为2 ms,为了充分反映双闭环控制策略的可行性,仿真时间设为200 ms,动子运行速度设为1 m/s,位置控制为外环控制,选取最优开通/关断位置(开通位置为18.5 mm,关断位置为49.5 mm)。图14 为位置外环和电压PID 内环恒压控制的电压仿真波形。图14(a)为给定值60 V 的电压输出波形,从图14(a)中可以看出,在发电机开始运行45 ms 后输出电压趋于稳定;图14(b)为给定值45 V 的电压输出波形,从图14(b)中可以看出,在40 ms 后输出电压趋于稳定。
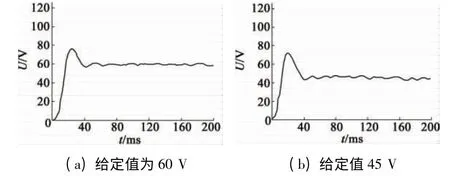
图14 恒压控制输出电压仿真波形
通过对上述仿真结果的分析可以看出,采用双闭环控制策略可实现恒压控制,达到了预期的目标。
4 结 语
通过联合仿真研究可知,DLSRG 系统具有连续发电能力,且发电效率较高,约为80.6%,符合设计要求。在位置控制内环和PID 电压外环的双闭环控制策略下,DLSRG 系统稳定输出,可控性好,动态响应时间短,能够实现恒压控制。
猜你喜欢
大电机技术(2022年5期)2022-11-17
大电机技术(2022年3期)2022-08-06
北京航空航天大学学报(2022年5期)2022-06-06
大电机技术(2022年2期)2022-06-05
防爆电机(2022年1期)2022-02-16
防爆电机(2021年6期)2022-01-17
防爆电机(2021年4期)2021-07-28
电子制作(2018年19期)2018-11-14
电子制作(2018年11期)2018-08-04
电子制作(2018年1期)2018-04-04
