
重载运输智能驾驶技术研究
2020-03-05 02:33:54
技术与市场 2020年2期
(中车株洲电力机车有限公司产品研发中心,湖南 株洲 412001)
0 引言
自20世纪80年代起,澳大利亚、英国、德国、日本等国家进行了大量列车自动驾驶技术的研究,CBTC系统作为自动驾驶的关键技术得到广泛运用,而近年来国际重载运输飞速发展,美国、加拿大、俄罗斯、澳大利亚等地域广袤、煤炭矿石资源丰富的国家均大力发展重载运输技术,铁路在资源与环境可持续发展方面优势显著,但重载运输中还存在着人工操纵不一致、以人工作业为主,人为观察机车、线路异常,开行万吨重载组合列车操作强度与难度大等问题,因此现有重载运输列车运行效率、安全性与平稳性、资源利用率、社会经济效益方面仍有较大提升空间,提高列车控制水平和系统安全性成为提升重载列车技术发展的重要方向。
1 城轨交通自动驾驶技术
高密度、小间隔、安全运输是城市轨道交通自动驾驶技术运用中的显著特点,以移动闭塞为技术特点的CBTC系统正广泛应用于城市轨道交通自动驾驶,CBTC系统能实现车地双向、车与轨旁的实时大容量信息安全传输通信,产品安全认证等级可达SIL4,突破了传统信号系统的限制,控制更加灵活,运行效率更高,列车在运用中满足安全、准点、舒适、节能、精准停车等技术指标。
CBTC系统主要由软件构成,轨旁设备少,其主要结构如图1所示。

图1 CBTC系统结构图
CBTC是基于通信的列车控制系统,可实现精准定位,通过移动闭塞缩短运行间隔,将速度和位置信息通过车地通信传递,从而追踪控制区内全部列车,并为后续列车计算和发送移动授权,形成列车闭塞区间。VOBC综合线路速度和移动授权,计算并控制列车当前速度,保证列车运行的安全性。
2 重载列车智能驾驶技术
重载运输的特点是远距离、长编组、大载重、高能耗、运用环境复杂,因此,城市轨道交通的自动驾驶技术无法全部直接应用在重载运输领域,研究重载列车的自动驾驶技术,要基于线路条件、运用特点、装备现状,开发具有高可靠性、高安全性、高智能化特点的智能驾驶技术。
智能驾驶系统应保留机车原有的安全防护与电气系统控制逻辑,其原理见图2。
重载列车智能驾驶技术可实现自动唤醒、自动整备、自动运行、导向安全的自动逻辑控制、自动休眠的全自动化运行控制,融合地面调度、轨道信号,实现机车自动注册、自动调车、自动无线重联编组、运行过程中的临时限速,同时实现机车的智能化自检、智能跟随控制。
3 关键技术及研究重点
要实现上述重载列车智能驾驶技术,需要突破机车运用场景、线路条件、机车控制、障碍物检测等多项关键技术。
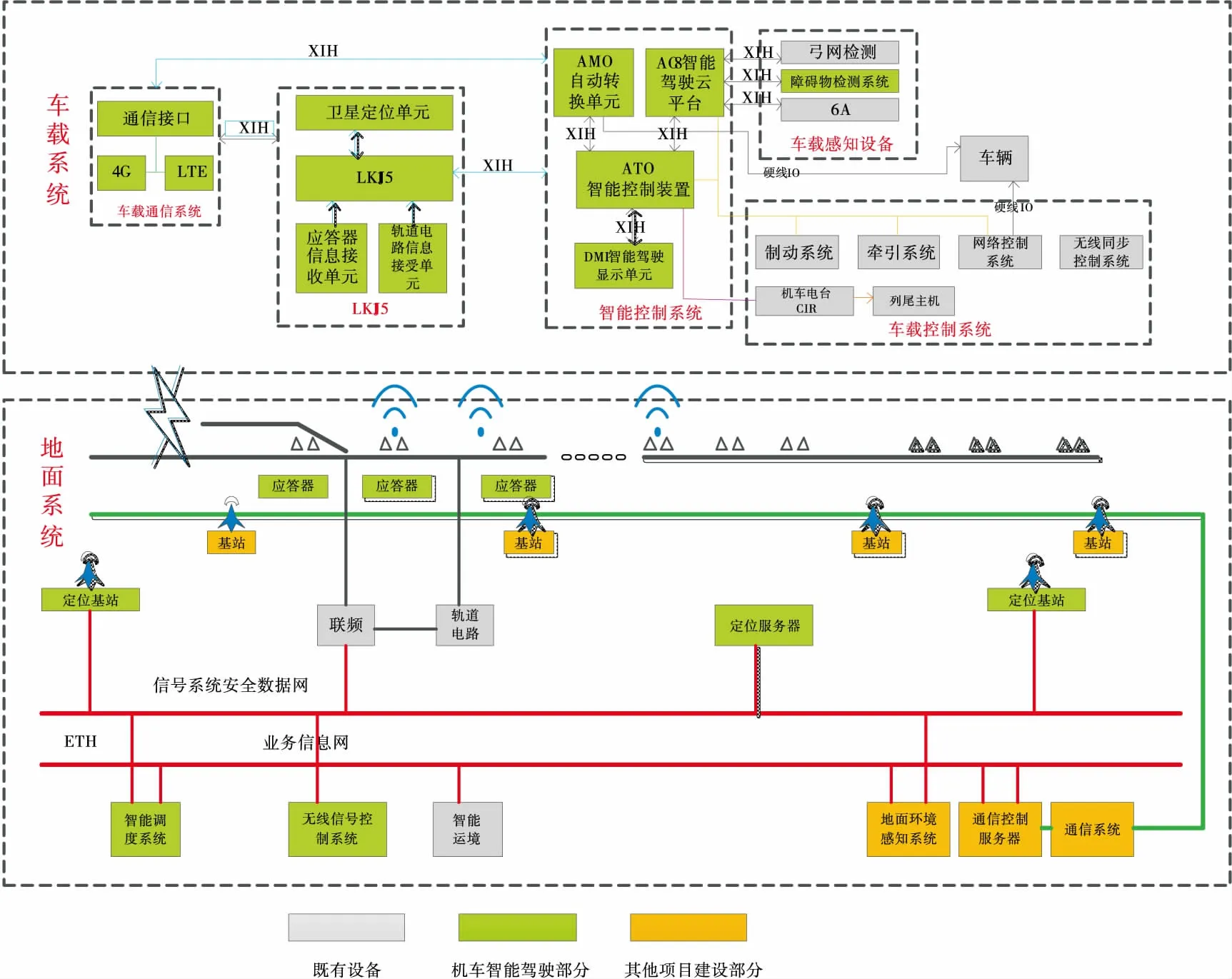
图2 系统原理框图(节车)
3.1 智能驾驶场景分析
智能驾驶技术结合机车特性、运用环境及司乘人员操纵机车的规定,研究机车智能驾驶过车中的段内作业、出段与挂车、始发站发车、区间运行、区间停车、区间发车、解编入段等多个应用场景,相关的场景描述、约束条件、功能边界、经验规则是开发重载列车智能驾驶技术的关键条件。
3.2 目标速度曲线规划与跟随技术
智能驾驶技术基于最优控制与模型预测控制理论,采集列车编组、基础线路信息、机车状态等信息,规划出列车运行的最优目标速度曲线,再结合模型预测控制算法生成控制指令,最终实现目标速度跟随,实现列车安全、正点、平稳、节能的目标。
3.3 基于斜楔-弹簧模型的列车车钩力计算与仿真
重载列车编组长、载重大,尤其是空气制动缓解过程,列车纵向冲动大,容易出现车钩断裂缓冲器磨损、渡板变形等问题。智能驾驶技术以现有运用的真实实验数据为基础,建立精确车钩-缓冲器模型,实时计算并反馈车钩力,同时作为列车智能驾驶正常运行的一个约束条件,有效防止车钩力过大,降低维修成本。
3.4 障碍物检测技术
在机车运行前方的铁路限界内,智能驾驶技术综合运用激光雷达、毫米波雷达、视频监控可实现障碍物检测、识别及报警。各系统结合各自传感优势进行预警,保障机车在复杂路况下的运营安全,系统还具备优良的探测功能、目标识别、事件记录等功能,在不同光照条件、风雨雪等恶劣环境下均具有良好的适用性。
3.5 基于流体力学的制动管路+阀建模、列车制动系统建模
智能驾驶技术通过对空气波列车管、制动缸中暂态变化过程的准确建模,实现列车车钩力的精确计算与仿真,通过空气制动力的精确计算,得出列车牵引/制动控制的可靠算法,以保证列车运行的安全。
3.6 基于精确多质点动力学模型的机车车辆纵向力和冲动研究
智能驾驶技术通过列车动力学及能耗优化建模、空气制动特性研究、多质点列车动力学建模研究、不同编组方式下的牵引力与电制动力综合建模、不同级位的特性控制与级位转换、不同减压量的作用时间与缓解时间建立精确的列车动力学模型,从而实现机车牵引、制动性能的全面把控,对提升列车寿命、减少重载运输能耗作用显著。
4 结语
通过研究开发重载列车智能驾驶系统,提出机车运用场景,以及障碍物检测、精准定位、安全导向控制策略等前沿技术的研究方向,从而达到降低司乘人员配置和司乘人员工作量,提高运输效率,提升运行安全性的目的,对提高国际重载运输列车智能驾驶技术有着重要意义。
猜你喜欢
中国设备工程(2023年2期)2023-02-13 06:22:56
小哥白尼(趣味科学)(2021年4期)2021-07-28 02:23:50
控制与信息技术(2021年2期)2021-07-23 01:10:48
云南画报(2021年4期)2021-07-22 06:17:10
装备制造技术(2021年2期)2021-07-21 05:38:24
小学生学习指导(低年级)(2019年6期)2019-07-22 03:32:48
铁道通信信号(2019年2期)2019-03-26 06:39:42
时代农机(2018年11期)2019-01-09 03:45:14
铁道学报(2018年4期)2018-05-07 08:00:53
中国铸造装备与技术(2017年3期)2017-06-21 11:33:36
