
基于机器视觉的液压支架高度测量方法
2020-03-04 02:48郝丁丁王渊郭卫
现代电子技术 2020年2期
郝丁丁 王渊 郭卫


摘 要: 针对煤矿井下液压支架工况复杂,高度检测和控制难度较大等问题,提出一种巷道环境下液压支架高度非接触式测量方法。该方法采用基于双边滤波的单尺度Retinex图像增强算法得到增强图像,再对增强图像进行边缘检测、PPHT处理,求解出液压支架结构件的真实角度,间接测量出液压支架高度。实验结果表明,该液压支架高度测量方法可有效地煤矿井下视频图像中进行测高,且误差小于2 mm。
关键词: 液压支架; 高度测量; 机器视觉; 图像增强; 性能比较; 误差分析
中图分类号: TN307?34 文献标识码: A 文章编号: 1004?373X(2020)02?0138?04
Method of hydraulic support height measurment based on machine vision
HAO Dingding, WANG Yuan, GUO Wei
Abstract: As for the problems of complex working conditions and larger difficulty in height detection and control of hydraulic support for underground coal mine, a non?contact measuring method for the height of hydraulic support under the roadway environment is proposed. In this method, the single scale Retinex image enhancement algorithm based on bilateral filtering is used to obtain the enhanced image, and then the edge detection and PPHT processing of it are carried out to solve the true angle of the hydraulic support structure component and indirectly measure the height of the hydraulic support. The experimental results show that the height measurement method of the hydraulic support can effectively measure the height in the video image of underground coal mine, and the measurement error is less than 2 mm.
Keywords: hydraulic support; height measurement; machine vision; image enhancement; performance comparison; error analysis
0 引 言
在運用采煤机截煤所提供的高度调控的情况下,液压支架能够提供高度检测[1?2]参考数据。这对于其自动移降柱起到了过程控制策略的支撑作用。不过,对于工作面液压支架来说,在高度方面,无论是控制,还是检测都有难度。其原因为煤矿井下工况非常复杂。现如今的测量方法十分不理想:仅仅借助于机械装置进行读数并且记录方式为人工。
现有井下低照度环境下视频图像增强算法主要有三种:直方图均衡化[3]、中值滤波、双边滤波[4?5]。直方图均衡滤波算法处理后图像灰度级衰减,造成细节丢失,且出现局部过亮或伪轮廓现象。而就中值滤波而言,则对纹理破坏较大。双边滤波往往将图像细节在高频滤噪中丢失。Retinex算法容易在明暗对比强烈处产生“光晕现象”,使得边缘保持性较差。基于双边滤波的单尺度Retinex算法利用取对数的方法将照射光分量和反射光分量分离,用高斯模板对原图像作卷积,得到低通滤波后的图像,再用原图像减去低通滤波后的图像,得到高频增强的图像。一方面对该图像做基于灰度值的局部对比度增强,并补偿图像进行亮度估计情况下的损失;另一方面,在图像的亮度估计之中,采用双边滤波算法,然后取反对数,最终得到增强后的图像。
1 液压支架高度测量原理
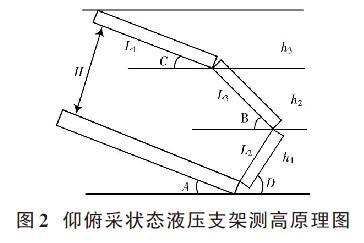
为了将液压支架姿态描绘出来,通过测量液压支架结构件的角度值,建立数学模型计算出液压支架结构高度值。在结构件轮廓边长数据的基础上,完成液压支架垂直高度逆向运算,也就是h1,h2和h3。这三个数值的和即为总高度H。角度值测量液压支架高度原理图如图1所示。
由于工作面具有一定的倾角,需要将坐标系旋转,以标准水平面作为基准。仰俯采状态液压支架测高原理图如图2所示。
使用已经标定好的CCD相机对液压支架进行视频采集。并进行视频帧图像增强处理和角度实时测量。为了获取将摄像机内外参数,在单目CCD摄像机的标定之中选用张正友标定法。以地面为基准面,且取经过CCD摄像机上某一参考点竖直于地表平面的轴为Z轴,相互的向量X,Y分别为X轴,Y轴确定世界坐标系。标定好的场景中,P点在世界坐标[[XWYWZW]T]与摄像机坐标[[XCYCZC]T]间变换关系为:
[XCYCZC=UXWYWZW+T] (1)
式中,T和U分别为其外部参数的平移向量和旋转矩阵。
2 图像增强算法
本文算法流程图见图3。
[Retinex]算法可简述如下:
[R(x,y)=logS(x,y)-log[F(x,y)*S(x,y)]] (2)
式中:[Gauss]核为[F(x,y)=λexp(-(x2+y2)c2)];“[*]”表示卷积运算;[c]为控制邻域范围的尺度常量;[λ]为归一化常数,使得[F(x,y)dxdy=1]。
采用双边滤波进行亮度估计,公式为:
[hx= k-1x-∞+∞-∞+∞fξcξ,xsfξ,fxdξ] (3)
归一化常数为:
[k(x)=-∞+∞-∞+∞c(ξ,x)s(f(ξ),f(x))dξ]
式中,[c(ξ,x)]表示临近点[ξ]与中心点[x]之间的距离相似度,而就中心点[x]和临近点ξ而言,其亮度相似度是用[s(f(ξ),f(x))]来表示的。其具体情况如下:
[cξ,x=e-12ξ-xσd2]
[s(f(ξ),f(x))=e-12δ(f(ξ),f(x))σr2]
基于灰度值的局部對比度提升算法选择3×3模板在图像滑动,局部对比度增强算法可表示为:
[g(x,y)=s·f(x,y)+(1-s)·g_(x,y)] (4)
式中:[g(x,y)]为当前像素点[f(x,y)]邻域内均值;s是表征增强程度灵敏度的系数。
3 液压支架高度测量方法
对于低照度原图要获得识别度比较高的图像,需要借助于图像增强算法进行处理。而就ROI,也就是感兴趣区域而言,在设置并提取该区域的情况下,同步实施图像角度的测量。这样,先采集原图经灰度化处理,并借助于ROI区实施边缘检测,在累计概率霍夫变换[6?7]之后,获取液压支架边缘直线的斜率并进行角度计算。最终根据角度和液压支架结构件的轮廓长度,间接测量出液压支架高度。
要对图像里面亮度变化显著的像素点集合实施识别,就要借助于边缘检测[8?9]。而常用图像边缘检测方法通过计算图像梯度,然后根据给定的灰度控制阈值来处理图像。本文所实施的边缘检测滤波选用传统Canny算子。对于图形旋转,采用累计概率霍夫变换(PPHT)直线检测,这样,相比于标准霍夫变换,计算的时间会因为计算量的减少而缩短。最终,将检测结果在原图像上进行标记。在CCD摄像机标定之中,将其安装于液压机模型的侧面。在此基础上,实施液压支架视频图像的采集,环境设置两组:一组为理想环境;另一组模拟煤矿井下巷道低照度,低对比度,高噪声环境,取其液压支架的同位置实施同时序2帧图像进行对比。现场采集的图像解析度为640×480,图4是液压支架图像采集中两组不同环境下的对比。
4 实验结果及分析
经对比,针对煤矿井下复杂环境噪声较多,分别采取灰度图双边滤波、中位数滤波、直方图均衡滤波、基于双边滤波的SSR算法的图像增强算法对图像进行处理[10?11]。所有算法先进行灰度变换,再对图像的对比度实施适度扩展,并且从主观评价方法和客观评价方法[12?13]两方面入手进行比较。相关参数设置如下:[σd]=3,[σr]=0.1,[σd]和[σr]分别代表空间距离相似度和色彩范围相似度的灵敏度。滤波窗口大小为11×11,s=10,c=250,[λ]=exp(0.5)。实验结果如图5所示。
图5f)~图5j)为同一ROI区域提取结果。图像增强实验结果经对比,本文给出的4种方法增强效果存在较大差异。从主观条件上看,图5g)的去噪效果非常明显,不过,因为光线较暗,所以效果并不好,尽管在亮度和去噪方面有所改善;图5h)则存在诸如图像边缘模糊和照度偏暗现象;图5i)层次感明显,边缘锐化不足;图5j)较完整地保留边缘的细节信息,层次感表达较好,视觉效果突出。
图6所示为4种算法处理的灰度值直方图。
从图6对比可看出:原始图像的明暗区域灰度值分布不均衡;图6b)~图6d)的灰度值分布改善则并不大;图6e)灰度值在明暗区域占比均匀,亮度方面有所增强,轮廓细节在对比度较高的情况下更加清楚。
运用客观评价方法对误差进行衡量,采用均方误差(MSE)、信噪比(SNR)、峰值信噪比(PSNR)、平均绝对误差(MAE)和运行时间为评价标准。4种算法增强图像的质量评价如表1所示。
由表1可知,就直方图均衡化算法而言,其增强效果不佳,但在对比度和运行时间上有优势。从MSE和PSNR上看,灰度双边滤波算法和中位数滤波算法没有较好的保真效果。基于双边滤波的SSR算法对比度高,保真效果好,图像边缘突出,综合效果好。
就基于双边滤波单尺度Retinex图像增强算法而言,在运用该算法的液压支架高度的测量之中,分别将液压支架调到不同的角度,将本文方法与实际液压支架高度测量值进行差异对比。表2表示为相关的结果。
5 结 论
本文提出一种煤矿井下巷道环境下液压支架高度测量方法,该方法将图像增强算法与单目视觉相结合,对液压支架高度进行非接触式测量。液压支架高度测量方法采用了基于双边滤波单尺度Retinex图像增强算法,并从主观评价方法和客观质量评价两方面比较几种图像增强算法的性能。结果表明,该算法提高了图像的对比度和信噪比,突出了图像的细节和边缘信息,提高了运算效率。实验证明,所提方法高度测量误差小于2 mm,满足工业应用要求。
参考文献
[1] 程耀,陈兆星,蔡永伦,等.一种可调节的液压支架高度测量装置:CN204154234U[P].2015?02?11.
[2] 牛剑峰.液压支架高度测量技术研究与应用[J].煤矿机械,2015,36(5):210?212.
[3] 宋文,程智林.一种基于暗通道的自适应直方图增强去雾方法:CN105225210A[P].2016?01?06.
[4] 梁广顺,汪日伟,温显斌.基于双边滤波与非局部均值的图像去噪研究[J].光电子·激光,2015(11):2231?2235.
[5] 王一帆,尹传历,黄义明,等.基于双边滤波的图像去雾[J].中国图象图形学报,2014,19(3):386?392.
[6] MAO S B. Exact pupil detection algorithm combining Hough transformation and contour matching [J]. Journal of computer applications, 2016(5): 16?19.
[7] JIAO J, GONG X, GUO H. Airport runway detection based on local Hough transform [J]. Journal of equipment academy, 2017(3): 64?71.
[8] DU Y, TONG M, ZHOU L, et al. Edge detection based on Retinex theory and wavelet multiscale product for mine images [J]. Applied optics, 2016, 55(34): 9625.
[9] LENG X, JI K, XING X, et al. Hybrid bilateral filtering algorithm based on edge detection [J]. Iet image processing, 2017, 10(11): 809?816.
[10] 寇兴元.基于Retinex理论的图像增强算法研究[D].沈阳:沈阳航空航天大学,2015.
[11] 刘晓阳,乔通,乔智.基于双边滤波和Retinex算法的矿井图像增强方法[J].工矿自动化,2017,43(2):49?54.
[12] 韩泽,蔺素珍.基于主客观评价相关性的多波段融合图像评价方法[J].光电工程,2017,44(9):895?902.
[13] 张小利,李雄飞,李军.融合图像质量评价指标的相关性分析及性能评估[J].自动化学报,2014,40(2):306?315.
作者简介:郝丁丁(1992—),男,陕西榆林人,硕士,研究方向为煤矿机械及其自动化、计算机视觉。
猜你喜欢
物联网技术(2016年12期)2017-01-21
物理教学探讨(2016年11期)2016-12-19
科学与财富(2016年15期)2016-11-24
科教导刊(2016年25期)2016-11-15
软件工程(2016年8期)2016-10-25
科学与财富(2016年28期)2016-10-14
科技视界(2016年20期)2016-09-29
企业导报(2016年10期)2016-06-04
