基于计算全息的无衍射光莫尔条纹三自由度测量方法研究
2020-02-22 03:30:00吕清花翟中生王选择崔甲臣
光电工程 2020年2期
吕清花,程 壮,翟中生*,王选择,崔甲臣,吕 辉
基于计算全息的无衍射光莫尔条纹三自由度测量方法研究
吕清花1,2,程 壮3,翟中生3*,王选择3,崔甲臣1,2,吕 辉1,2
1太阳能高效利用湖北省协同创新中心,湖北 武汉 430068;2湖北工业大学理学院,湖北 武汉 430068;3湖北工业大学机械工程学院现代制造质量工程湖北省重点实验室,湖北 武汉 430068
针对工作台运动误差,提出了一种基于计算全息的无衍射光莫尔条纹三自由度测量方法。通过液晶空间光调制器(SLM)生成无衍射光,利用两束无衍射光干涉生成莫尔条纹。设计了无衍射光莫尔条纹三自由度测量光路,建立了三自由度运动误差数学模型,并用几何分析法将三种运动误差(偏摆角、滚转角和俯仰角)进行分离。利用旋转台模拟不同大小的三自由度运动误差,带有误差信息的无衍射光和莫尔条纹图案分别由CCD1和CCD2接收。实验结果表明,通过光斑中心偏移量计算出的实际运动误差值接近理论值,测量误差不超过0.0104°,验证了无衍射光莫尔条纹三自由度测量系统的可行性与正确性。
三自由度测量;无衍射光;莫尔条纹;液晶空间光调制器

1 引 言
大行程精密工作台在工业生产和科研领域内占有重要的地位,其运动精度会直接影响零件的加工精度与测量精度[1],当工作台工作时,受直线导轨自身精度的影响,不可避免地会产生微小的角运动,这种附加运动必然会产生多余的运动误差,并且随着行程不断增大,运动误差也会增大。为了提高加工与装配精度,通常采用补偿的方式去减小这种附加运动所带来的运动误差[2],但是补偿的前提是能够检测出导轨在运动过程中产生的微小线位移与角位移。
众多领域有对多自由度测量的需求。目前,多自由度测量技术主要分为接触式和非接触式。接触式测量对被测对象产生干扰,应用较少。非接触式测量主要采用光学原理,利用激光具有高分辨率、高灵敏度、抗干扰能力强的特点。Zhang提出了一种基于激光外差干涉的位移角度实时测量系统[3-4],该方法仅能实现一个方向上角度和位移的同时测量。研究者还尝试用激光衍射技术进行多自由度测量[5-8],房丰洲等利用全息透镜实现四自由度的测量,该方法对环境稳定性要求很高。匡翠方等利用光斑位置检测技术得到光斑位置变化量对应的实际多自由度误差[9-10]。光斑位置精度将影响测量结果的精度和准确性。为了实现多自由度的测量,研究者们还采用了多个CCD的视觉检测技术[11-13]和多个探测器的光学准直技术[14-15]等,但结构复杂、对测量环境要求较高。为了增大测量范围,研究者提出了多技术相结合的测量方法[16-18],如赵转萍等[16]利用激光干涉和光斑位置检测技术相结合,通过CCD中被测物的位置信息以及激光干涉仪测得光臂长度的变化量计算出六自由度误差,该方法测量范围大,但是系统结构复杂,且光路调试比较困难。
我们前期提出了利用轴锥镜产生无衍射光莫尔条纹的方法测量三自由度角度误差[19],相比其它方法,具有受环境影响小、测量范围大和灵敏度高等优点。但由于轴锥镜的加工精度影响无衍射光莫尔条纹的效果,从而影响测量结果的精度,且对不同的测量范围和精度需要更换不同角度的轴锥镜,操作不便。
本文提出了一种基于计算全息的无衍射光莫尔条纹三自由度测量方法。采用空间光调制器(spatial light modulator,SLM)加载高阶相位全息图代替轴锥镜生成无衍射光,利用无衍射光长距离稳定性及莫尔条纹放大性,设计了工作台三自由度测量系统。并建立了运动误差数学模型,用几何分析法将三种运动误差进行分离,实现了偏摆角、俯仰角与滚转角三自由度的同时测量。通过改变全息半径,使生成的无衍射光和莫尔条纹的效果最好,不仅减少因轴锥镜加工精度带来的误差,且具有更好的操作灵活性。
2 测量理论
2.1 无衍射光莫尔条纹特性
无衍射光具有中心光斑能量集中,大小、形状不随传播距离发生变化的特性,其振幅表达式符合零阶贝塞尔函数,相连两零点距离近似为π,如图1(a)所示,所以在外观上将无衍射光看成等间距的贝塞尔环,可以类比作同心圆光栅。由相干光干涉理论可知,无衍射光莫尔条纹的干涉场为不同位置的零阶贝塞尔分布的复振幅的叠加,干涉场的强度为[20]

式中:1和2分别为两束光的光程,1和2分别为两束光在极坐标内的极径,和分别为轴锥镜的锥角和折射率,J0为零件贝塞尔函数,=2π/,为波长。
莫尔条纹仿真图如图1(b)所示。由于无衍射光莫尔条纹是两束无衍射光干涉而成,所以其兼具同心圆光栅莫尔条纹和无衍射光的特性。无衍射光中心光斑的大小和形状不随传输距离发生变化,并且莫尔条纹具有计量与放大作用。则根据无衍射光莫尔条纹的特性,将其引入三自由度测量具有一定的优势。
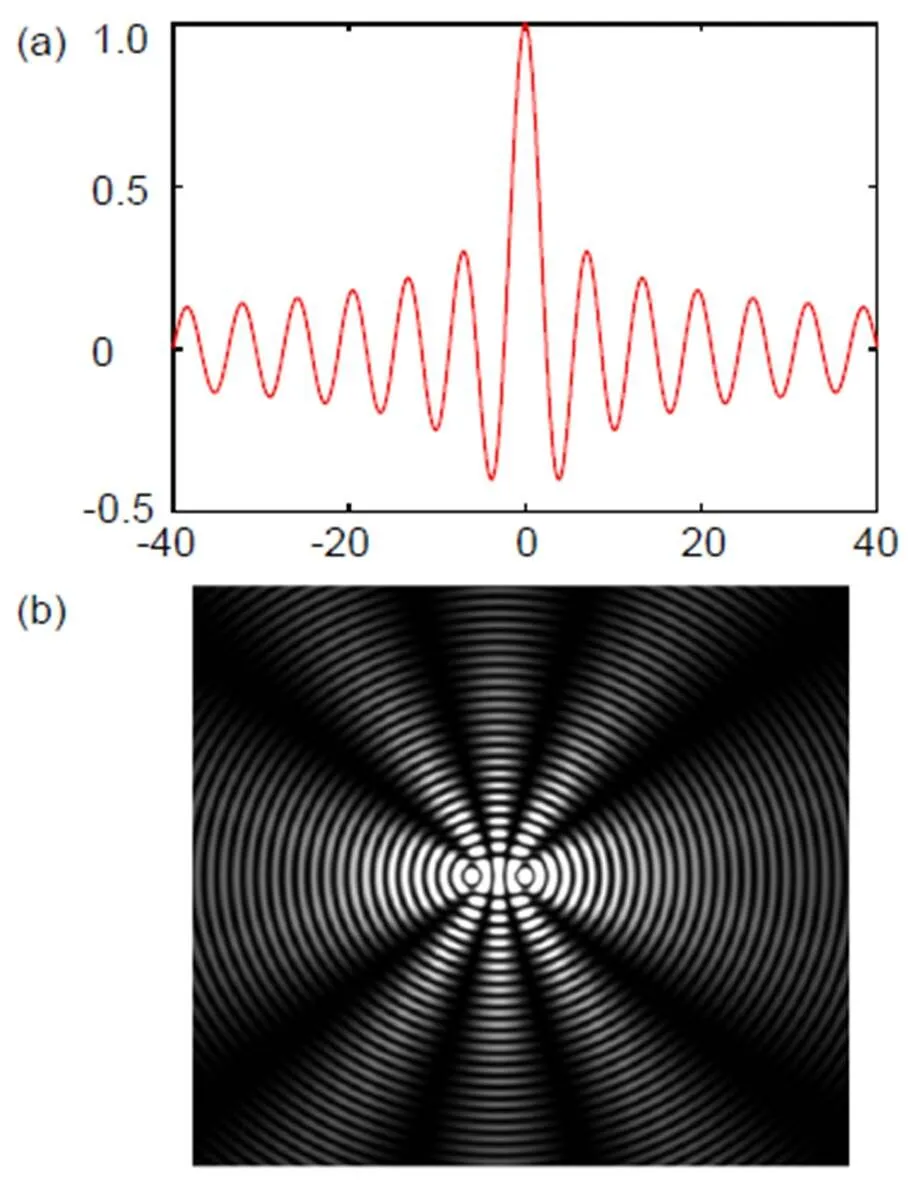
图1 无衍射光莫尔条纹。
(a) 无衍射光振幅;(b) 莫尔条纹仿真
Fig. 1 Non-diffracting Moiré fringes.
(a) Amplitude distribution of non-diffracting beam; (b) Simulation of non-diffracting Moiré fringes
2.2 三自由度测量系统
无衍射光莫尔条纹三自由度测量光路如图2所示,测量单元由反射镜1、半透半反镜和分光棱镜2组成(图2中虚线框部分),固定在工作台上。测量三种角度误差:偏摆角(Yaw,绕轴旋转)、俯仰角(Pitch,绕轴旋转)、滚转角(Roll,绕轴旋转)。从激光器出来的光经过准直扩束装置,入射到加载计算全息图的SLM,产生的无衍射光经过分光棱镜1变成两束,一束光经过光衰减片、反射镜1和分光棱镜2;另一束光经过反射镜2和半透半反镜,被反射的光束经过分光棱镜3被CCD1接收,透过的光束经过分光棱镜2和另外一束经过分光棱镜2的光束发生干涉形成莫尔条纹被CCD2接收。
当测量单元随着大行程工作台运动,在三个方向上会产生角位移运动误差,CCD1与CCD2中无衍射光的中心位置会发生相应的改变,根据CCD1与CCD2中的光斑中心的位置变化即可检测角位移运动误差的变化。
2.3 三自由度运动误差分离
从图2中可知,CCD1接收的是单束无衍射光,CCD2接收的是无衍射光莫尔条纹。定义三种角运动误差导致CCD1无衍射光中心光斑偏移量分别为:1()、1()、1(),CCD2中的光斑中心位移变化量为:2()、2()、2()。假设半透半反镜中心距离分光棱镜3的中心为1,分光棱镜3的中心距离CCD1的距离为2,反射镜1与分光棱镜2的中心连线距离为3。
1) CCD1中光斑位置变化
当存在偏摆角误差时,工作台绕轴旋转,同时运动单元里面的半透半反镜也会绕轴旋转,偏摆角误差模型如图3(a)。以入射在半透半反镜中心的光束分析,当半透半反镜绕轴旋转一定角度时,无衍射光的中心会在轴方向上产生一定的偏移。从平面方向观测偏摆角误差模型,简化的原理图如图3(b),11=1,11=2,由几何关系可得Ð1=2。则偏移量1()为


当存在俯仰角误差时,工作台绕轴旋转,俯仰角误差模型如图4(a),简化的原理图如图4(b),11=1,11=2,则Ð222=2。偏移量1()为

, (3)

图3 CCD1中偏摆角误差产生的位移量。(a) 示意图;(b) 简化原理图
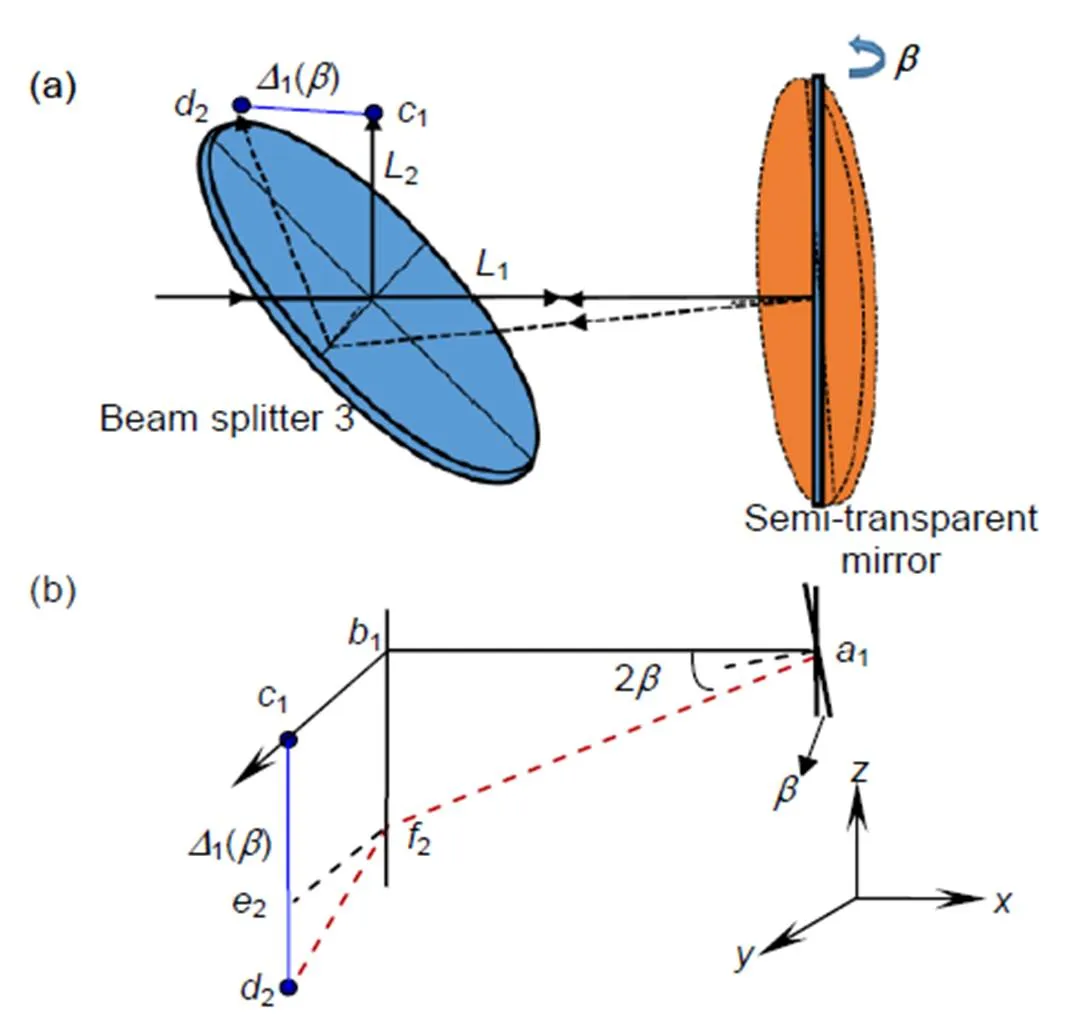
图4 CCD1中俯仰角误差产生的位移量。(a) 示意图;(b) 简化原理图
当存在滚转角误差时,工作台绕轴旋转,此时无衍射光的中心无偏移,即1()=0。CCD1中不能观测到滚转角误差带来的变化。
能用普通话正确、流利、有感情地朗读课文,是朗读的总要求,教师应结合文本材料的具体特点,因势利导,激发学生的朗读兴趣和欲望,利用朗读赋予语言文字生机,增添语言文字的魅力,从而达到情感共鸣。
2) CCD2中光斑位置变化
当存在偏摆角误差时,其模型如图5(a)。以入射在反射镜1中心的光束分析,当整体单元的中心绕轴旋转一定角度时,CCD2中接收到的运动光束的中心在轴方向上产生一定的偏移。从平面方向观测偏摆角误差模型,简化原理图如图5(b),由几何关系可得33=33/(sinÐ333),Ð333=π/2-2Ð333,则偏移量2()为


当存在俯仰角误差时,模型如图6(a)。运动光束的中心在轴方向上产生一定的偏移。简化的原理图如图6(b)所示,则偏移量2()为

当存在滚转角误差γ时,滚转角误差模型如图7(a)。运动光束的中心在y轴和z轴方向上产生一定的偏移,此时的偏移量Δ2(γ)由两部分组成:y轴方向的Δ2y(γ)和z轴方向的Δ2z(γ)。简化的原理图如图7(b),则由几何关系可得,在y轴方向上的偏移量Δ2y(γ)为
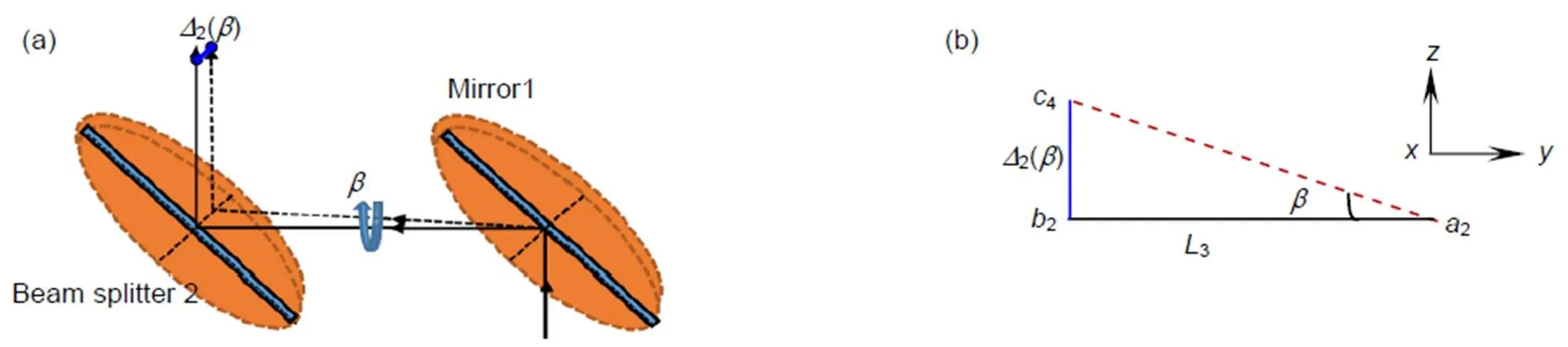
图6 CCD2中俯仰角误差产生的位移量。(a) 模型;(b) 原理图
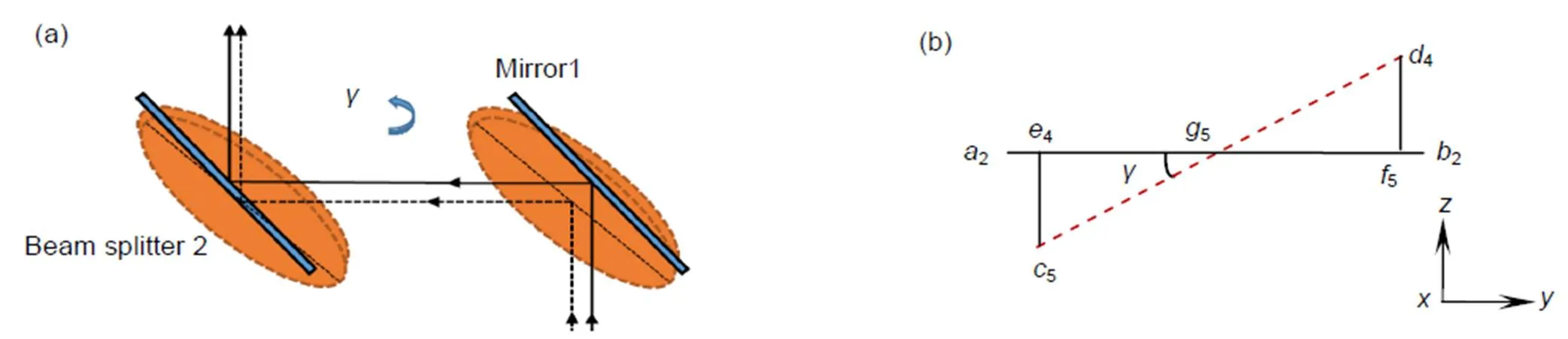
图7 CCD2中滚转角误差产生的位移量。(a) 示意图;(b) 简化原理图
在轴方向上的偏移量2z()为

当三自由度误差混合存在时,由于CCD1中光斑中心位置变化反映偏摆角和俯仰角的变化,先分别通过CCD1中光斑中心偏移量计算出偏摆角误差和俯仰角误差,并分别计算出由于偏摆角和俯仰角误差引起CCD2中光斑中心在方向和方向上的偏移量,则方向和方向上的剩余偏移量即为滚转角误差引起的,实现三自由度运动误差分离。
3 实验验证
利用旋转台模拟三自由度变化,将反射镜1、半透半反镜和分光棱镜2组成的测量单元放置于旋转台上。依据图2测量系统原理,搭建了基于计算全息的无衍射光莫尔条纹三自由度测量验证光路。其中激光器采用波长为632.8 nm的He-Ne激光器;SLM的液晶类型为透射式LCD,型号为GCI770102,分辨率为1024×768,像元间距为26 μm;选取全息半径大小为7 pixel的256级相位全息图;CCD的分辨率为1280 ×1024,像元间距为5.2 μm。旋转台的传动比为180:1。实验过程中在CCD前放置透镜缩小图像,使图像的整体轮廓信息尽可能反映完全。并测得半透半反镜中心距离分光棱镜3的中心1为16 mm,分光棱镜3的中心距离CCD1的距离为2为20 mm,反射镜1与分光棱镜2的中心连线距离3为94 mm。
为了检测三自由度变化引起CCD1与CCD2中光斑中心位置的变化情况,在0.5°的转动范围内,分别在三个方向上每次旋转0.125°,旋转次数为4次,记录下CCD1与CCD2中光斑中心位置,部分实验结果如图8和图9所示。
利用图像处理技术和无衍射光莫尔条纹相关算法,计算出其光斑中心的像素坐标如表1所示。
由表1可以看出,偏摆角变化,CCD1中光斑中心横坐标基本不变,主要变化反映在纵坐标;俯仰角变化,CCD1中光斑中心纵坐标基本不变,主要变化反映在横坐标;滚转角变化,CCD1中光斑中心横、纵坐标都基本不变(变化小于1像素)。
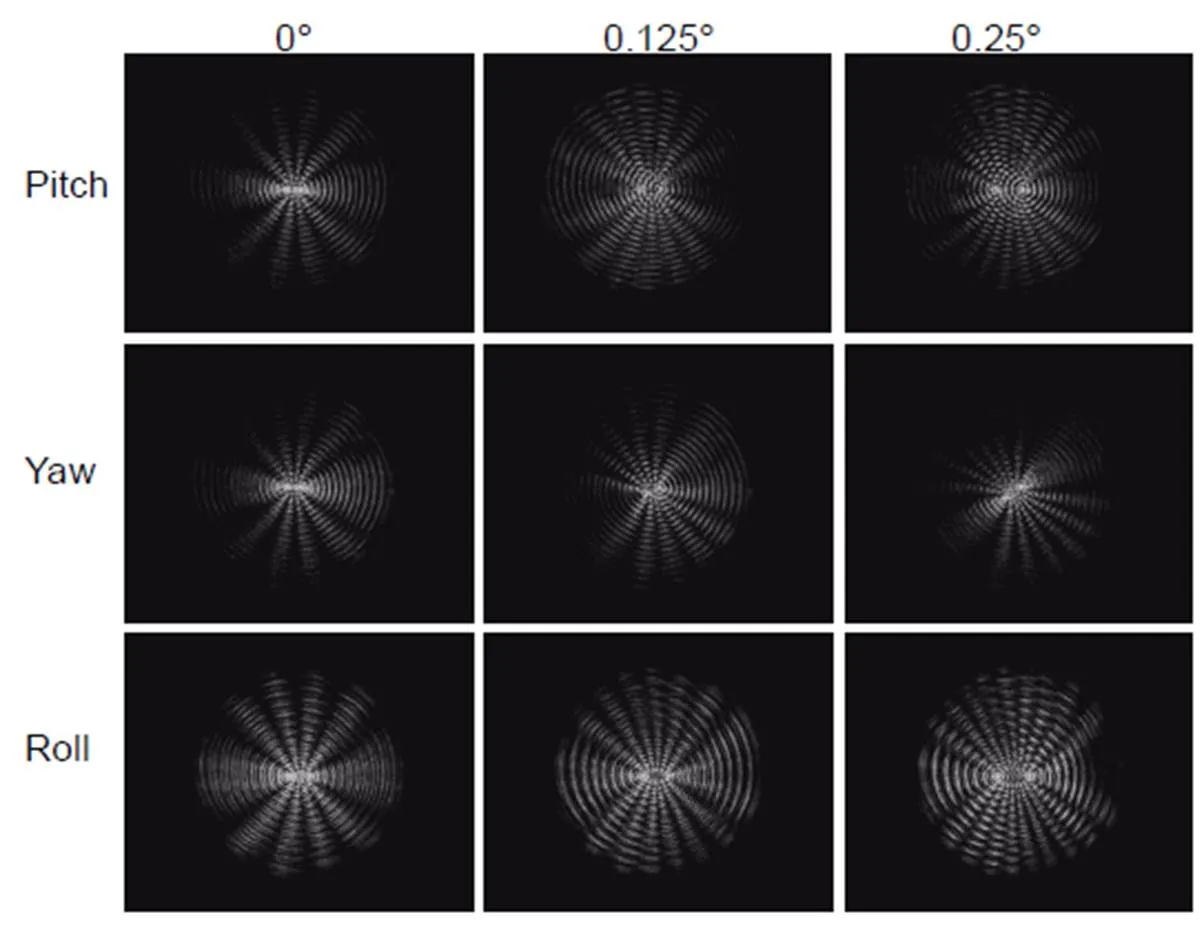
图8 CCD1中三自由度变化的实验结果
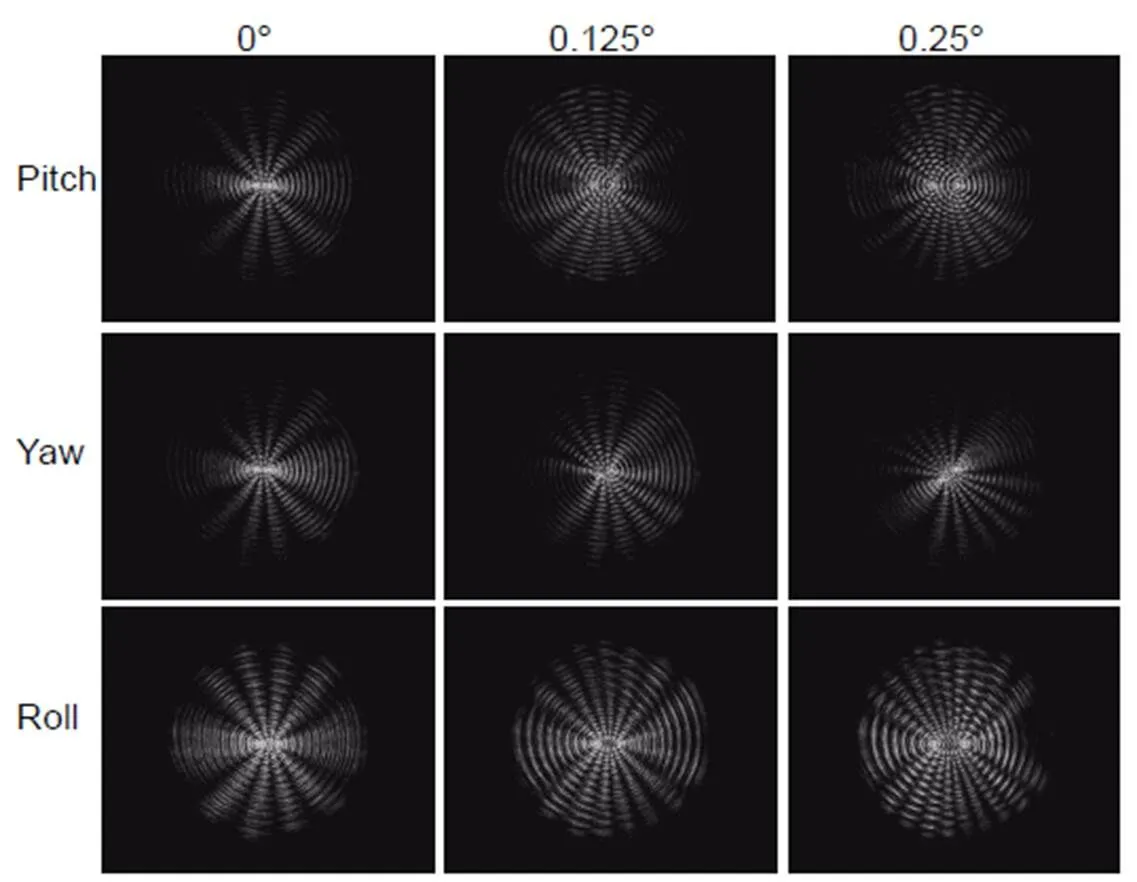
图9 CCD2中三自由度变化的实验结果
由表1可以看出,CCD2中,偏摆角变化,光斑中心纵坐标基本不变,而横坐标发生较大变化;存在俯仰角,横坐标基本不变,纵坐标变化较大;滚转角变化,纵坐标是基本不变,主要变化反映在横坐标上,与图9中光斑位置变化规律一致。
根据对应方向的变化量、相关元器件及被测量参数,利用理论推导的光斑中心变化量,计算出实际角位移变化量,计算结果如表2,变化趋势如图10。
由图10(a)可以看出,角度运动误差从初始状态0°,依次增加0.125°至0.5°时,理论上每旋转1次,角位移变化0.125°,根据CCD1中光斑中心的偏移量求得角位移,与理论值进行比较,最大误差约为0.132°-0.125°=0.007°。由图10(b)可以看出,同样根据CCD2中光斑中心的偏移量求得角位移,与理论值进行比较,最大误差约0.0104°。
4 结 论
针对工作台的三自由度运动误差,本文通过SLM生成无衍射光,利用无衍射光中心光斑的大小和形状不随传输距离发生变化的特性,同时结合莫尔条纹的计量与放大作用,提出了一种基于计算全息的无衍射光莫尔条纹三自由度测量方法。实验表明,该方法其角位移误差测量精度不超过0.0104°,验证了测量三自由度角度误差的可行性。在测量精密工作台的运动误差时(0.0001°数量级),可以通过增加CCD与测量单元之间的距离,选用像素更小的CCD等方法实现。同时,需要在后续的研究中,通过SLM校正成像像差以及改进光斑中心定位方法等方面提高测量精度。

表1 CCD1、CCD2中三自由度变化对应的光斑中心
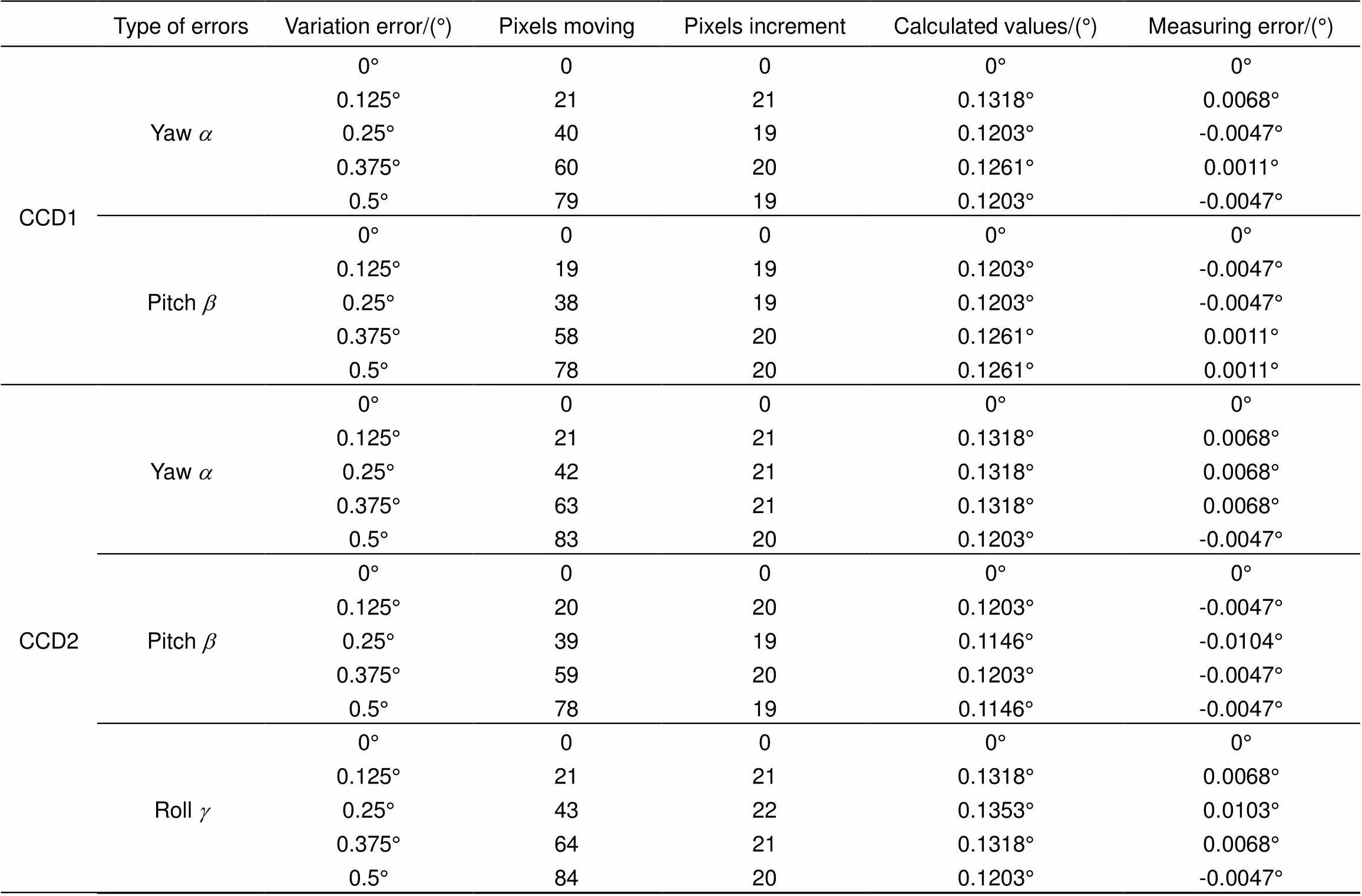
表2 根据CCD1、CCD2中图像运动误差计算结果
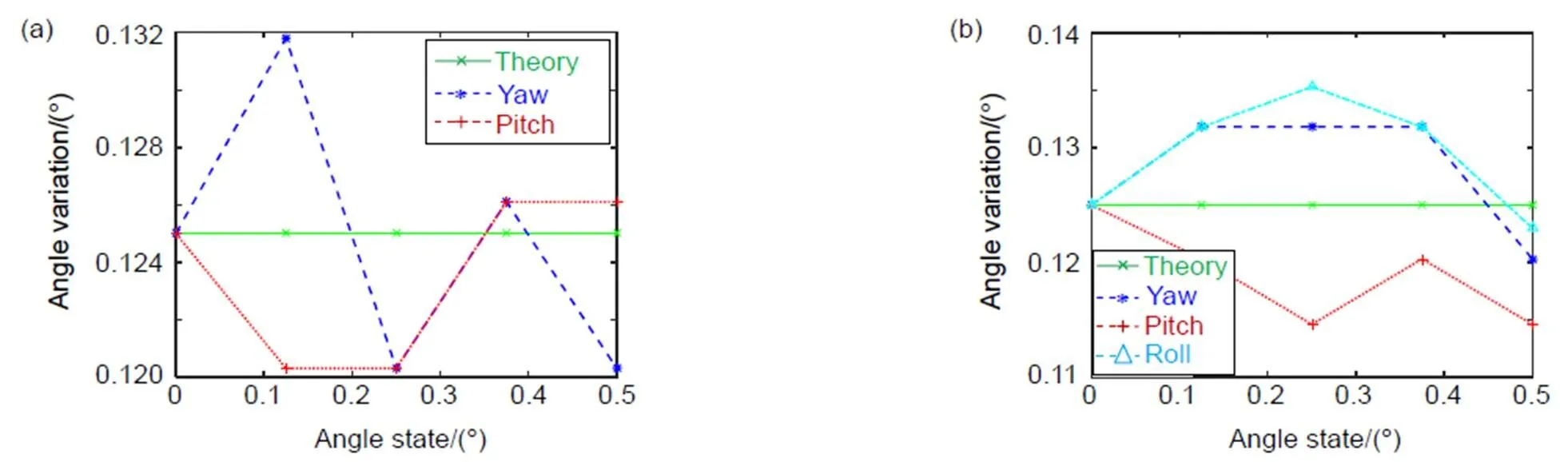
图10 实验结果。(a) CCD1;(b) CCD2
[1] Ekinci T O, Mayer J R R, Cloutier G M. Investigation of accuracy of aerostatic guideways[J]., 2009, 49(6): 478–487.
[2] Zhang X F, Huang Q X, Yuan Y,. Large stroke 2-DOF nano-positioning stage with angle error correction[J]., 2013, 21(7): 1811–1817.
张昔峰, 黄强先, 袁钰, 等. 具有角度修正功能的大行程二维纳米工作台[J]. 光学精密工程, 2013, 21(7): 1811–1817.
[3] Zhang J H, Menq C H. A linear/angular interferometer capable of measuring large angular motion[J]., 1999, 10(12): 1247–1253.
[4] Menq C H, Zhang J H, Shi J. Design and development of an interferometer with improved angular tolerance and its application totheta measurement[J]., 2000, 71(12): 4633–4638.
[5] Fang F Z, Zhang Y Q, Zhang G X. A posion-setting method of six-freedoms in space[J]., 1998(2): 39–41.
房丰洲, 张奕群, 张国雄. 空间物体六自由度定位术[J]. 航空精密制造技术, 1998(2): 39–41.
[6] Kim J A, Bae E W, Kim S H,. Design methods for six-degree-of-freedom displacement measurement systems using cooperative targets[J]., 2002, 26(1): 99–104.
[7] Zheng S C, Zhou S M, Huang G K,. Micro-angle measurement based on two-dimensional moire fringes generated by square aperture micro-lens array[J]., 2018, 38(2): 0205002.
郑三超, 周素梅, 黄高坤, 等. 基于方形孔径微透镜阵列二维叠栅条纹的微小角度测量[J]. 光学学报, 2018, 38(2): 0205002.
[8] Khodadad D, Singh A K, Pedrini G,. Full-field 3D deformation measurement: comparison between speckle phase and displacement evaluation[J]., 2016, 55(27): 7735–7743.
[9] Liu Y D, Wang J, Liang J W. Dynamic target pose measurement by laser tracking[J]., 1999, 29(3): 148–151.
刘永东, 王佳, 梁晋文. 动态目标全姿态激光跟踪测量[J]. 激光与红外, 1999, 29(3): 148–151.
[10] Kuang C F, Feng Q B, Liu B. Methods for simultaneously measuring five-dimension information by laser[J]., 2005, 29(3): 322–324.
匡萃方, 冯其波, 刘斌. 五维信息同时测量的激光方法[J]. 激光技术, 2005, 29(3): 322–324.
[11] Wu H, Zhang X M, Gan J Q,High-precision displacement measurement method for three degrees of freedom-compliant mechanisms based on computer micro-vision[J]., 2016, 55(10): 2594–2600.
[12] Ruan X D, Li S L, Zhuge L,. Study on the pose measurement of multi-degree freedom mechanisms with stereovision[J]., 2000, 11(5): 571–573.
阮晓东, 李世伦, 诸葛良, 等. 用立体视觉测量多自由度机械装置姿态的研究[J]. 中国机械工程, 2000, 11(5): 571–573.
[13] Lv Y, Feng Q B, Liu L S,. Six-degree-of-freedom measurement method based on multiple collimated beams[J]., 2014, 43(11): 3597–3602.
吕勇, 冯其波, 刘立双, 等. 基于多准直光的六自由度测量方法[J]. 红外与激光工程, 2014, 43(11): 3597–3602.
[14] Kroll J J. Six degree of freedom optical sensor for dynamic measurement of linear axes[D]. Charlotte: University of North Carolina at Charlotte, 2003.
[15] Thomas B L, Bass H M, Loftus L K,. Laser aligned five-axis position measurement device: 5798828[P]. 1998-08-25.
[16] Zhao Z P, Lv X M, Zheng S F,. The study of measuring and tracking of six-freedom object using a single laser beam[J]., 2001, 22(S2): 35–36, 38.
赵转萍, 吕晓明, 郑叔芳, 等. 运动目标六自由度单束激光跟踪测量方法研究[J]. 仪器仪表学报, 2001, 22(S2): 35–36, 38.
[17] Hsieh H L, Pan S W. Three-degree-of-freedom displacement measurement using grating-based heterodyne interferometry[J]., 2013, 52(27): 6840–6848.
[18] Kim J W, Kang C S, Kim J A,. A compact system for simultaneous measurement of linear and angular displacements of nano-stages[J]., 2007, 15(24): 15759–15766.
[19] Bie Y G, Lv Q H, Shang Y Y,. A method of three-degree-of-freedom measurement based on non-diffracting beam[J]., 2018, 35(4): 81–87.
别业广, 吕清花, 商逸远, 等. 基于无衍射光的三自由度误差测量方法[J]. 重庆师范大学学报(自然科学版), 2018, 35(4): 81–87.
[20] Zhai Z S, Zhao B. Experiments and theoretical analyses of non-diffracting beams interference[J]., 2007, 27(8): 1503–1507.
翟中生, 赵斌. 无衍射光的干涉实验与理论分析[J]. 光学学报, 2007, 27(8): 1503–1507.
3-DOF measurement method for non-diffracting Moiré fringes based on CGH
Lv Qinghua1,2, Cheng Zhuang3, Zhai Zhongsheng3*, Wang Xuanze3, Cui Jiachen1,2, Lv Hui1,2
1Hubei Collaborative Innovation Center for High-efficient Utilization of Solar Energy, Wuhan, Hubei 430068, China;2School of Science, Hubei University of Technology, Wuhan, Hubei 430068, China;3Hubei Key Laboratory of Modern Manufacturing Quantity Engineering, School of Mechanical Engineering, Hubei University of Technology, Wuhan, Hubei 430068, China

Schematic diagram of measurement system of 3-DOF error motions
Overview:Error motions of a linear stage directly influence the performance of the precision positioning system in which the stage is used. Therefore, it is a critical task to measure the error motions. A measurement method for the determination of three-degree-of-freedom (3-DOF) error motions based on non-diffracting Moiré fringes is proposed.
A semi-transparent mirror (STM), a beam splitter and a mirror are adopted as the measurement head, which is fixed on the moving stage in order to sense 3-DOF angular errors. Two CCDs are used to capture the non-diffracting beams patterns that are carrying the errors. Computer generated holograms (CGHs) are loaded into a liquid crystal spatial light modulator (SLM) to produce non-diffracting beams. A beam splitter prism (BS1), placed after the SLM, splits the non-diffracting beam into two beams, the transmitted beam and the reflection beam. The reflected non-diffracting beam, after reflection by mirror 2, traveling through BS3, is reflected by the STM, and reaches CCD1. The image of the non-diffracting beams is captured by CCD1. The other beam transmits from BS3 to CCD2 after travelling through STM and BS2. The transmitted non-diffracting beam exiting BS1 passes through an attenuator, and then is reflected by mirror 1, from where it meets the beam from the moving unit. These two non-diffracting beams generate non-diffracting Moiré fringes, which are captured by CCD2.
When the stage moves, the position of the central points of the non-diffracting beams (as received by CCD 1) and the forms of Moiré fringes (obtained by CCD 2) will change in relation to different errors. It can measure the 3-DOF errors, which are yaw, pitch, and roll. By analyzing the geometric position of these center points, mathematical models for 3-DOF motion errors are established. Obviously, one of central points in CCD2 will be unchanged while the other one will changes according to different motion errors of stage.
A rotary table is used to simulate the 3-DOF motion errors and demonstrate the theoretical analysis. The measurement head is fixed on the table, which rotates different small angles (0°, 0.125°, 0.25°, 0.375°, 0.5°). The on-diffracting beam and non-diffracting Moiré fringe patterns are obtained by CCD1 and CCD2, respectively. The actual angular displacement is calculated by the offset of the center of the spot with the mathematical models. Compared with the theoretical value, the angular displacement error is less than 0.0104°, which verifies the feasibility and correctness of the 3-DOF measurement system for non-diffracting Moiré fringes.
Citation: Lv Q H, Cheng Z, Zhai Z S,3-DOF measurement method for non-diffracting Moiré fringes based on CGH[J]., 2020, 47(2): 190331
3-DOF measurement method for non-diffracting Moiré fringes based on CGH
Lv Qinghua1,2, Cheng Zhuang3, Zhai Zhongsheng3*, Wang Xuanze3, Cui Jiachen1,2, Lv Hui1,2
1Hubei Collaborative Innovation Center for High-efficient Utilization of Solar Energy, Wuhan, Hubei 430068, China;2School of Science, Hubei University of Technology, Wuhan, Hubei 430068, China;3Hubei Key Laboratory of Modern Manufacturing Quantity Engineering, School of Mechanical Engineering, Hubei University of Technology, Wuhan, Hubei 430068, China
Aiming at the motion errors of the linear stage, a measurement method for the determination of three-degree-of-freedom (3-DOF) error motions is proposed based on non-diffracting Moiré fringes produced by computer-generated holograms (CGHs). A liquid crystal spatial light modulator (SLM) is used to generate non-diffracting beams, and two non-diffracting beams form Moiré fringes. A 3-DOF measuring optical path of non-diffracting Moiré fringes is designed. Meanwhile, a 3-DOF mathematical model of motion errors is established, and three kinds of motion errors (yaw angle, roll angle and pitch angle) are separated by geometric analysis method. A rotary table is used to simulate the 3-DOF motion errors on different conditions. The NDB and non-diffracting Moiré fringe patterns are obtained by CCD1 and CCD2 respectively. Experimental results show that the motion errors calculated by the positions of the central points agree well with the theoretical value with the error less than 0.0104°, which can verify the feasibility and correctness of the 3-DOF measurement system for non-diffracting Moiré fringes.
3-DOF measurement; non-diffracting beam; Moiré fringes; SLM
Supported by National Natural Science Foundation of China (51575164), the Science and Technology Research Project of Department of Education of Hubei Province (D20161406), and Hubei Collaborative Innovation Center for High-efficient Utilization of Solar Energy (HBSKFZD2014007)
TP391
A
10.12086/oee.2020.190331
: Lv Q H, Cheng Z, Zhai Z S,. 3-DOF measurement method for non-diffracting Moiré fringes based on CGH[J]., 2020,47(2): 190331
2019-06-14;
2019-11-04
国家自然科学基金资助课题(51575164, 51405143);湖北省教育厅重点项目(D20161406);太阳能高效利用湖北协同创新中心基金项目(HBSKFZD2014007)
吕清花(1980-),女,副教授,博士研究生,主要从事光电子技术、光电检测、光伏技术方面的研究。E-mail:linsa080@126.com
翟中生(1978-),男,教授,博士研究生,主要从事激光加工、光电检测方面的研究。E-mail:zs.zhai@mail.hbut.edu.cn
吕清花,程壮,翟中生,等. 基于计算全息的无衍射光莫尔条纹三自由度测量方法研究[J]. 光电工程,2020,47(2): 190331
* E-mail: zs.zhai@mail.hbut.edu.cn
猜你喜欢
都市(2023年6期)2023-12-28 07:56:54
诗歌月刊(2023年1期)2023-03-22 14:06:24
天水行政学院学报(2022年4期)2022-11-18 09:02:36
地理空间信息(2022年3期)2022-04-01 14:16:14
少儿美术(快乐历史地理)(2020年4期)2020-02-24 13:06:28
阅读(高年级)(2019年9期)2019-11-15 07:22:54
阅读与作文(小学高年级版)(2019年8期)2019-10-16 04:46:50
学苑创造·A版(2019年4期)2019-05-10 00:19:52
制造技术与机床(2017年7期)2018-01-19 02:29:53
测绘工程(2017年3期)2017-12-22 03:24:50