
基于超声相控阵的水下船体表面成像方法研究
2020-02-19 03:17叶晓同王月兵郑慧峰
计量学报 2020年1期
叶晓同,赵 鹏,郑 珂,王月兵,郑慧峰
(中国计量大学 计量测试工程学院,浙江 杭州 310018)
1 引 言
目前,每天的活跃船舶数量平均为数十万艘。如此多的船舶在河流、海洋中行走难免会碰到一些暗礁或者附着一些藻类贝类生物,对水下船体造成损伤[1]。如果不及时发现、检修,将会对船上的人员货物造成无法估量的损失。由于水体的吸收和散射作用,传统基于电磁波的船体成像方法作用距离非常有限[2],存在局限性。而超声波作为一种探测手段,因其具有在水下远距离传播的优势,被广泛应用于水下物体成像[3]。
在超声成像应用中,张铁栋等利用单波束前视声呐实现了对水下场景的三维重建[4];Sabo等利用合成孔径声呐对海底断层进行成像[5];王爱学等使用单波束侧扫声呐对水下地形进行重建[6]。由于上述几种成像方法都是使用单探头,只能通过移动探头来提高成像性能,使用不方便且成像分辨率不足,因此无法应用于水下船体表面成像。之后董庆亮等在分析侧扫声呐和多波束测深系统的特点后,提出了侧扫声呐和多波束测深系统结合的方法增强声呐成像质量[7];在此基础上易媛媛等设计了一种以多波束声纳系统为核心的船舶底部安全检测装置,实验结果表明该装置初步具有三维图像识辨功能[8];之后陈孟君等将多波束声呐应用于水下船体成像,得到了船底三维图像,但成图效果较差[9]。此外多波束声呐往往需要通过国外途径购置,经济成本高昂,并且探测精度也越来越无法满足当前水下探测要求,迫切需要一种新的成像方法。
超声相控技术无需通过机械移动换能器即可实现空间区域的大范围扫描,且可有效地调节声波信号的辐射和声波聚焦位置等聚焦参数[10],在一定程度上可提高超声检测成像的空间分辨率[11]。为此,本文提出一种基于超声相控阵技术的水下物体成像方法,利用超声阵列换能器对物体进行扫描,实现水下船体表面的三维成像。
2 基本原理
2.1 超声阵列换能器声场特性
对于超声阵列换能器,利用惠更斯原理,将阵列中每个阵元看作独立声源,分别求出每个阵元对声场的贡献,再叠加起来,就可以得到整个阵列声场空间中任意位置的声压值。
超声阵列换能器单个阵元在空间中任意P点产生的声压为:
(1)
式中:ω为角速度;k为声波波数;ρ为介质密度;u0为换能器辐射面中心处的振速;m=1,2,…,M;n=1,2,…,N,即将单个阵元划分为M·N个微元;rm,n为辐射平面内第M·N个微元与声场中任意观察点之间的距离。
那么,整个超声阵列换能器的声场是各阵元声场的叠加,即
(2)
2.2 超声相控阵原理
将超声相控阵列视为相干声源,当输入激励信号时,由于干涉现象的存在,声波在空间相互叠加,形成波阵面。在波阵面上,相位相同的声波叠加,振动加强;相位相反的声波叠加,振动减弱。因此控制各阵元晶片辐射声波的发射时延,可形成具有聚焦或偏转特性的声场[12]。通过改变相位延迟,实现聚焦位置的更变,实现查扫功能。如图1所示为改变焦点位置至P点时声束偏转聚焦的几何示意图。

图1 相控声束偏转聚焦示意图Fig.1 Schematic diagram of deflection focusing of phased array sound beam
以阵列中心O作为参考点,当振元数N为奇数时,中心阵元到第n个阵元的距离为:
(3)
第n个阵元到焦点P的距离为:
(4)
则中心阵元和第n个阵元间的声程差为:
ΔSn=F-L
(5)
可以得出中心阵元与阵元n之间的时延差为:
(6)
式中:n=1,2,…,N-1;F为焦距;d为相邻阵元中心间距;θ为声束偏转角;c为声速。
N为偶数时,阵列中心到第n个阵元的距离为(n-(N-1)/2)d,与N为奇数时相等,因此,N无论为奇数或偶数时各阵元的时延均可通过式(6)求得。
2.3 成像原理
利用超声相控阵技术实现声束聚焦,当船体位于聚焦区域内时声束会发生强散射,散射声波被换能器接收,如图2所示,两个接收振元O1、O2分别接收来自同一反射点Q(x,y,z)的回波信号,以换能器阵列中心作为空间坐标原点,两接收阵元与X轴的空间距离分别为d1和d2;扫描点Q(x,y,z)与两个接收端的距离分别为L1和L2。

图2 扫描阵元与扫描点空间几何关系Fig.2 Geometric relationship between scanning array elements
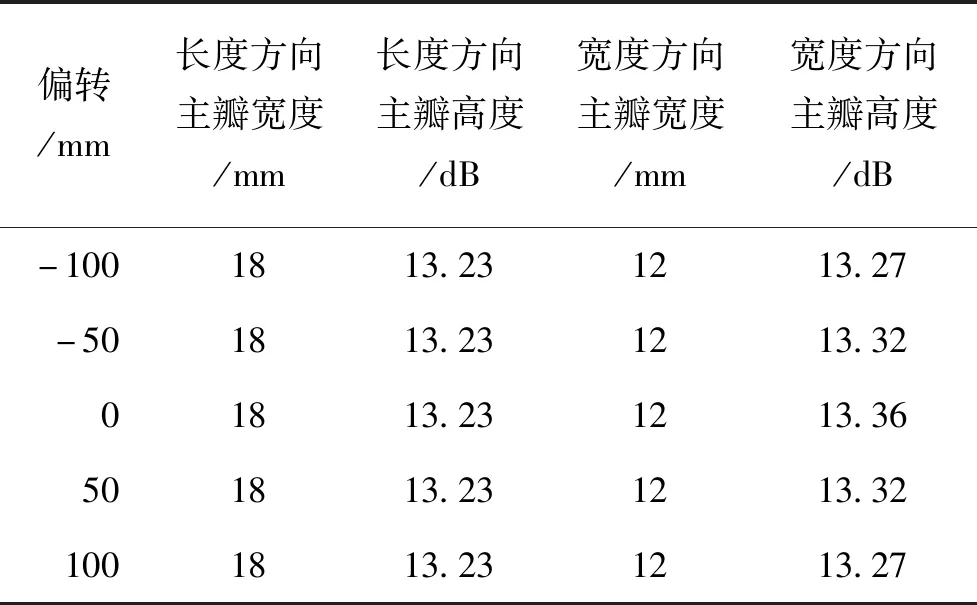
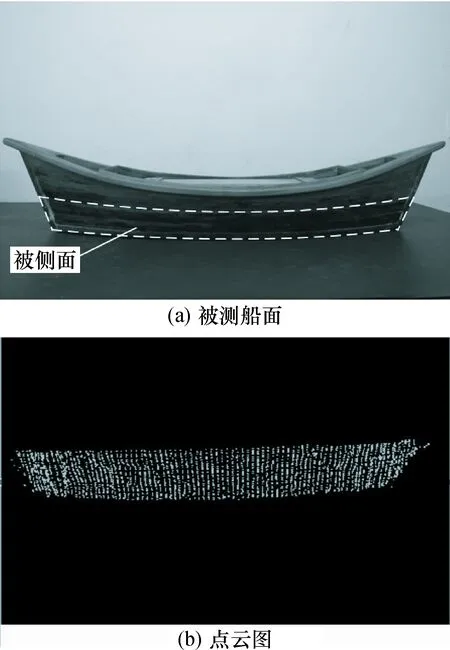
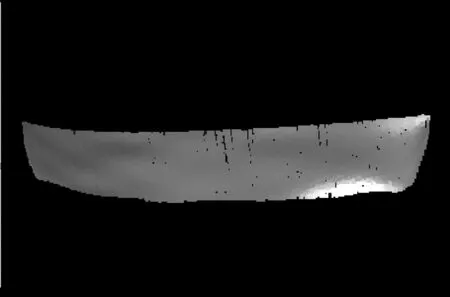
根据图2所示的几何关系,在YOZ平面中,分别以O1、O2为圆心,L1、L2为半径画圆,当两圆的圆心距D满足条件:|L1-L2| (7) 因为两圆相交有两个交点,并且声波是沿Z轴正方向传播,因此,这里取Z正方向的交点,即扫描点的空间位置坐标Q(y,z)两坐标值为正。 由于所用为一维阵列换能器,只能实现YOZ平面的相控扫描,因此扫描点Q的x坐标值与初始原点O处相同,在完成一条扫描线相控扫描后,需要在x方向机械移动换能器阵列,移动后x值即为该扫描线x值,通过移动换能器即可实现空间二维扫描。 换能器的性能对成像效果有直接的影响[13],因此在进行成像实验前需对换能器性能进行测试。在设计换能器时依据文献[13]所得结论,在保证换能器焦域覆盖范围与轴向径向分辨率的条件下,则应选择频率较高且阵元中心距较大的探头。实验使用的换能器阵列由32片压电陶瓷片构成,其中每个阵元都可以用来发射声波信号,同时第4、12、20、28阵元可以用来接收回波信号,4个接收振元两两组合后依据式(7)得出6组扫描点空间坐标,取平均值以提高精度。每个阵元宽度为3.6 mm,长度为120 mm,相邻阵元中心间距为4 mm,阵列的工作频率f=500 kHz。介质声速c=1 480 m/s,介质密度ρ=1 000 kg/m3,质点振速u0=0.016 m/s。由于一维线型超声阵列换能器只能在一个方向聚焦,为了提高换能器聚焦性能,在换能器阵列前端加装曲率半径为450 mm的声透镜,实现在换能器宽度方向自聚焦,焦距为800 mm。 依据式(6)计算出相控时延分别控制声束汇聚在距换能器表面800 mm,相控偏转-100、-50、0、50、100 mm的地方,使用水听器对焦点处X轴、Y轴的声压进行扫描,将水听器测试得到的实测结果与利用式(1)在相同偏转位置处得到的仿真结果进行对比,结果如图3、图4所示。比较图3与图4,与仿真结果相比,实测结果与仿真结果趋势基本一致,换能器具有良好的聚焦效果。 图3 换能器焦平面各偏转方向实测声压Fig.3 Actual sound pressure measured at different deflection directions on the focal plane of the transducer 图4 换能器焦平面各偏转方向仿真声压Fig.4 Simulating sound pressure in different deflection directions on the focal plane of the transducer 表1与表2给出了实测与仿真情况下的主瓣最大声压值下降6 dB的主瓣宽度和主瓣高度。 表1 各偏转方向实测声压数据Tab.1 Measured sound field data in different deflection directions 由表1和表2可见,两个方向的实测主瓣宽度略大于仿真结果,主瓣宽度较窄,具有良好的成像分辨率。 同时对换能器声束聚焦在距换能器表面800 mm、无偏转时声轴方向上的声压进行测试,并与仿真结果对比,结果如图5所示。 表2 各偏转方向仿真声场数据Tab.2 Simulated sound field data in different deflection directions 图5 声轴方向仿真与实测声压Fig.5 Simulated and measured sound pressure in the direction of the sound axis 以声压最大值降低一半的范围作为有效聚焦区域,由图5可知此换能器有效聚焦区域为距换能器600~1 250 mm的地方,其中800 mm处为焦点所在。在此区域内换能器聚焦效果较好,经被测物体散射后回波信噪比最高。 为了验证成像结果,搭建了如图6所示实验系统,以木质船模作为成像物体,对一侧水下船体进行扫描。系统主要由超声阵列换能器、被测船模、固定装置、牵引装置、超声相控阵收发系统和上位机组成。上位机控制超声相控阵收发系统发出正弦脉冲信号激励换能器发出超声波,超声波信号在经过船模散射后被换能器接收,经超声相控阵收发系统传送至PC机显示。超声阵列换能器通过硬连接固定在牵引装置上,被测船模成像面放置在换能器有效聚焦范围内,本实验中为800 mm左右的地方。 图6 测量系统Fig.6 Test system 设备搭建完成后,控制超声阵列换能器进行相控扫描。在扫描时设置每条扫描线40个扫描点,相邻扫描点间距为2 mm,单条扫描线长为80 mm;在一条剖面线扫描完成后利用牵引装置将换能器运动一段距离,移动步进距离为5 mm,移动次数200步。即在80 mm×1 000 mm的扫描范围内扫描8 000个点。扫描的范围如图7(a)所示,图示部分为实际被测面,同时将扫描得到的各个点的数据绘制成图7(b)所示的点云图。 图7 对比图Fig.7 Compare photos 对所得到的点云数据首先进行中值滤波剔除奇异点[14],之后利用三次样条插值对数据缺失部分进行填补,最后利用LaBVIEW附带的3D Vision工具包用处理后的点云数据重构出被侧面三维模型,如图8所示。为了对重构模型进行误差分析,需要得到被侧面真实三维模型,因此利用海克斯康公司的型号为Global Classic 9158的桥式三坐标测量机对小船模型测量面进行三维坐标扫描,将三坐标机获取的点云数据作为被测面真实三维模型,如图9所示。 图8 测试三维模型Fig.8 Testing 3D models 图9 原始三维模型Fig.9 Original 3D model (8) 针对传统水下船体表面成像设备成本较高、成像误差较大的问题,本文研究了利用超声阵列换能器成像的方法。基于超声相控阵技术,利用超声阵列换能器对水下船体进行扫描,通过散射回来的回波信号,获取水下物体的空间坐标信息,实现了水下船体表面的扫描成像,且具有较高的成像分辨率。 对于本文所用的一维超声阵列换能器,目前只能实现一个方向的相控扫描,还需要借助行走机构实现二维扫描,在机械行走时花费了大量时间,因此接下来可设计成二维线阵换能器,实现两个方向的相控扫描,提高水下船体三维空间聚焦扫描成像的速度与精度。3 换能器测试




4 成像测试与结果分析




5 结 论
猜你喜欢
舰船科学技术(2022年20期)2022-11-28
中学生数理化·八年级物理人教版(2022年9期)2022-10-24
数学物理学报(2022年4期)2022-08-22
机械设计与制造(2022年4期)2022-04-28
海洋信息技术与应用(2020年3期)2020-08-24
海洋信息技术与应用(2020年1期)2020-06-11
铁道通信信号(2020年12期)2020-03-29
小学科学(学生版)(2019年10期)2019-11-16
汽车工程(2018年12期)2019-01-29
家庭影院技术(2018年11期)2019-01-21
