
视觉测振技术在柔性太阳翼模态试验中的应用
2020-02-19 04:21郭其威黄建民宋汉文
宇航学报 2020年1期
臧 旭,吴 松,郭其威,黄建民,宋汉文
(1. 复旦大学航天航空系,上海 200433;2. 上海宇航系统工程研究所,上海 201109;3. 同济大学航空航天与力学学院,上海 200092)
0 引 言
柔性太阳翼发射前折叠收拢,入轨后通过中心伸展机构带动柔性基板展开,具有频率低、模态密集、阻尼特性复杂等动力学特性[1]。柔性太阳翼动力学参数是航天器姿态和振动控制系统设计中的主要参数,其准确性和可靠性对航天器在轨稳定运行具有重要意义[2]。有限元建模分析和模态试验是获取结构动力学特性的重要手段[3],柔性太阳翼结构复杂,有限元建模时采取大量等效和简化,导致其参数辨识结果必然存在误差。因此,模态试验是准确获取太阳翼动力学特性的重要途径。传统模态试验(Experimental modal analysis,EMA)采用力锤及激振器作为激励源,采用蜂蜡或胶水将力和加速度传感器固定在被测结构表面,同时测量所施加的激振力和输出响应,构造频响函数,辨识结构模态参数[4]。
随着机器视觉的迅速发展,视觉测振技术作为一种全新的非接触、无损、全场测量手段,被广泛运用于超低频、大尺寸结构动态测试中[5],其具有高效、高精度、远距离测量的特点。Laible等[6]利用发动机喷气羽流对国际空间站2A太阳翼进行激励,并通过两台相机获取了太阳翼的在轨振动响应曲线。在超低频大型航天器结构模态试验中,激励数据通常测量成本过高或根本不可测。工况模态辨识方法(Operational modal analysis,OMA)假设输入为白噪声,可仅依据输出信号获取结构动力学参数,是柔性机构地面模态测试及在轨参数辨识最常用的辨识方法,主要包括特征系统实现算法(Eigensystem realization algorithm,ERA)[7]、多参考最小二乘复频域法(PolyMax)[8]等。
柔性太阳翼在轨处于真空、零重力环境,而地面模态试验中空气和重力的影响显著且难以消除。本文针对柔性太阳翼地面模态试验,通过基于视觉测振的OMA方法获取太阳翼振动频率、振型等动力学参数,并结合基于基恩士位移传感器的EMA辨识结果及考虑地面模态试验中空气、重力影响的有限元分析结果,验证了视觉测振模态辨识方法的有效性和准确性。
1 视觉测振技术
视觉振动测量中,图像是振动测量信息的载体,本试验基于图像特征跟踪法[9],为保证测量精度和可靠性在太阳翼上粘贴圆形反光标记(待测点),通过双目CCD摄像机跟踪太阳翼上圆形标记的位置变化信息,并对测量数据进行预处理,将被测物体的可视化图像转换为用于整翼模态辨识的振动信息。
1.1 图像信息提取
图1(a)为振动测量中的一副原始图像,受输入转换器件及周围环境等因素的影响,使图像包含了一些背景和反光区,但从图1(b)灰度直方图可以看出原始图像的灰度主要集中在30和180附近两边,即标记区域和其周围背景的灰度相距较远。为此本文采用固定的阈值变换对原图像进行处理,即指定100为阀值,图像中某像素的灰度值小于阈值,则将该像素的灰度值设置为0,否则设置为255,处理后的图像如图1(c)所示。

图1 图像处理过程Fig.1 Image processing process
将处理后图像根据形心计算公式得到每幅图像中光斑的形心位置(xc,yc),即可得到圆形反光标记的运动信息。图像中光斑的形心位置(xc,yc)的计算式为:
(xc,yc)=
(1)
式中:f(i,j)为位于(i,j)位置的像素点的强度值,xij和yij为像素中心的x和y坐标值,M为行像素点的数目值,N为列像素点的数目值。相邻两帧图像之间,待测点在x,y方向上的振动大小Δx和Δy分别为:
(2)
式中:x1,y1和x2,y2分别为振动前后两帧图像中光斑的形心位置。
1.2 三维空间坐标重建
在视觉测振中,每台相机将被测物体的三维物理空间坐标反映在二维图像坐标中,图像承载了被测物体的所有信息。为获取被测物体在物理空间中的振动信息,需同时利用两台相机对其进行拍摄。首先,根据视场内的固定靶点对相机主点坐标(图像中心坐标)、焦距、比例因子和镜头畸变等内部参数,及相机像空间坐标系相对于世界坐标系的三维位置和方位关系等外部参数进行标定,获取从图像空间到物理空间的转换关系,如图2所示。
根据立体图像中靶点、待测点和相机间的空间位姿关系,通过双目多约束的联合测量算法获取被测物体的待测点在物理空间中的三维振动信息,其具体测量流程如图3所示。

图2 空间点三维重建Fig.2 Spatial point 3D reconstruction
1.3 位移数据零均值处理
图像数据在经过繁琐复杂的坐标系转换后,最终得到每个待测点在空间绝对坐标下的振动位移数据。但这些位移数据具有一定的非稳态漂移和静态变形如图4(a)所示,不符合振动模态辨识中零均值数据的要求。经过简单的零均值处理后,振动位移数据仍有较大幅值的零频率信号,由于一般的滤波算法会造成一定的相位畸变,本文采用经验模态分解(Empirical mode decomposition,EMD)法[10],将振动位移数据按频率由高到低进行分解,使复杂信号分解成有限个本征模函数(Intrinsic mode function,IMF)(见图4(b)),且每个IMF都满足:1)函数在整个时间范围内,局部极值点和过零点的数目必须相同,或最多相差一个;2)在任意时刻点,局部极大值的包络(上包络线)和局部最小值的包络(下包络线)平均必须为零。去除低频的IMF分量,并将其它各阶IMF进行求和,作为重构振动位移数据用于模态参数辨识。
2 柔性太阳翼地面模态试验
为最大限度抵消重力对结构的影响,对太阳翼进行倒立垂直悬挂根部固定。试验中在宽频激励下通过基于基恩士位移传感器的EMA方法和基于双目相机视觉测振的OMA方法进行模态参数辨识,两种方法相互校验,获取太阳翼模态参数,试验流程如图5所示。
2.1 试验方案及实施过程
参试柔性太阳翼由主框架和两块柔性阵面组成(见图6(a)),整翼长度8 m,单块柔性阵面尺寸为6.5 m×2 m,整翼宽度为5 m,除阵面外主体结构采用铝合金材料,整翼总质量为175 kg。试验时采用APS-110激振器,为太阳翼提供低频大位移激励,并在激振器头部串联一个力传感器获取试验激励数据(见图6(c))。在太阳翼背面通过基恩士位移传感器,获取其振动位移数据(见图6(d))。在太阳翼正面粘贴直径20 mm的圆形反光标记,并通过两台Baumer TXG50 CMOS相机进行图像采集,如图6(b)所示。

图4 位移数据EMD分解Fig.4 The signal decomposition using EMD method

图5 柔性太阳翼模态试验流程图Fig.5 Solar array modal test flow chart

图6 试验现场示意图Fig.6 Test site diagram
试验过程中通过11个基恩士激光位移传感器对测点的位移响应信号和激励力信号进行逐行采集,进而获得其频响函数,测点如图7(a)所示;与此同时,两台相机对太阳翼上所有的测点进行同步采集,测点如图7(b)所示。在激光位移传感器获得一行响应数据的同时,相机可采集太阳翼所有测点的响应数据。在完成一次完备的EMA模态分析试验的同时,获得了多组图像数据,极大地提高了数据采集的效率。

图7 试验测点布置图Fig.7 The arrangement of the measurement points
2.2 测试数据预处理
从相机图像中提取的各待测点位移原始数据是叠加了刚体位移后的绝对坐标,本文采用EMD分解对原始测试数据进行预处理,将其转化为相对坐标下近似零均值的随机位移数据。以太阳翼左侧阵面右下角角点第108测点为例,具体位置如图7(b)所示。
将第108测点原始数据进行EMD分解,分解后各阶IMF时域和频域功率谱密度(Power spectral density,PSD)曲线如图8所示。去除后三阶IMF,相当于执行了0~0.05 Hz的高通滤波,并将其它各阶IMF求和作为滤波后的重构振动位移数据进行模态参数辨识,图9为第108测点原始、重构和滤除数据的对比,重复以上步骤得到每个待测点在静平衡位置处的零均值无相位畸变的振动位移数据。

图8 第108测点位移EMD分解(共10阶,由上自下为1~10阶。左侧为时域;右侧为频域)Fig.8 The displacement signal decomposition using EMDmethod at point 108 (10 orders kept, from top to bottom: the1st~10th orders. Left: time domain; Right: frequency domain)

图9 第108测点信号滤波效果Fig.9 Filter effect of displacement signal at point 108
2.3 模态参数辨识方法
模态参数辨识主要包括两个部分:传统试验模态辨识部分(EMA法)、图像采集信号的细化处理和仅由输出响应的工况模态辨识部分(OMA法)。
1)EMA模态辨识
在太阳翼背面,通过11个基恩士位移传感器,自上而下逐行对所有测点的位移响应信号进行测量,同步根据力传感器获取激励信号,获取所有测点的频响函数。柔性阵面上测点的频响函数如图10所示,框架上测点的频响函数如图11所示,因试验中2 Hz以后的频响函数数值很小,故将频响函数图截取到2 Hz进行展示,并利用PolyMax法进行参数辨识[11]。

图10 柔性阵面测点频响函数Fig.10 Array points frequency response functions

图11 框架测点频响函数Fig.11 Frame points frequency response functions
2)OMA模态辨识
试验前先通过粘贴在固定工装上的两排靶点(见图8(a))对相机的内部参数和外部参数进行标定。然后,在太阳翼正面通过双目CCD摄像机跟踪太阳翼上254个圆形标记的图像信息,图像采集频率为10帧每秒。从图像数据中提取所有待测点的位移响应初始数据,并通过EMD方法进行分解、重构,将原始数据转换为静平衡位置处的零均值振动位移数据。利用自然激励技术(NExT)与特征系统实现算法(ERA)相结合的方法[12],先将处理后的振动位移数据进行相关计算,得到维数为254的相关函数矩阵R254×254,再通过自然激励技术,任意一列相关函数等价于原系统在初始条件下的自由衰减响应,进一步利用相关函数代替自由衰减响应,输入ERA算法进行模态参数辨识,具体过程如图12所示。
2.4 试验结果
基于基恩士位移传感器的EMA方法和基于双目相机视觉测振的OMA方法,辨识得到的柔性太阳翼前五阶模态频率如表1所示,前五阶振型如图13所示。从表1可以看出,基于双目相机视觉测振的OMA方法的辨识结果与常规EMA方法的辨识结果一致度较高,各阶偏差小于3.4%。

表1 柔性太阳翼前5阶模态频率Table 1 The first 5 natural frequencies by EMA and OMA

图12 基于NExT-ERA算法的工况模态辨识流程Fig.12 OMA modal analysis procedure by NExT-ERA method

图13 柔性太阳翼模态振型图Fig.13 Modal shape diagram of solar array
3 柔性太阳翼模态数值仿真
利用有限元软件MSC.PATRAN/NASTRAN建立柔性太阳翼有限元模型如图14所示,其中主框架采用梁单元模拟,柔性阵面采用壳单元模拟,太阳翼张紧力通过间隙(Gap)单元施加在柔性阵面上。为准确模拟太阳翼地面模态试验环境,须考虑空气影响[13]及地面重力带来的边界效应影响[14]。

图14 柔性太阳翼有限元模型Fig.14 Finite element modal of solar array
空气的影响实质上是气固耦合问题,由于空气的附件刚度极小,因此其对太阳翼模态测试的影响主要表现为空气附加质量导致测试频率低于固有频率。空气影响可通过虚质量法进行仿真模拟,其预示结果如表2所示,空气对柔性翼弯曲和扭转频率影响较大,其中一阶弯曲模态频率下降约24%,空气对侧摆频率的影响可以忽略。

表2 空气对柔性太阳翼模态频率的影响Table 2 Influence of air on solar array modal frequency


表3 重力对柔性太阳翼模态频率的影响Table 3 Influence of gravity on solar array modal frequency
将同时考虑空气及重力影响的柔性太阳翼模态分析结果与试验结果进行对比,如表4~5所示。仿真分析频率与基于基恩士位移传感器的EMA方法和基于双目相机视觉测振的OMA方法辨识频率偏差均小于5%。

表4 柔性太阳翼仿真分析与EMA试验频率对比Table 4 Comparison of solar array’s simulation analysis andEMA test frequency
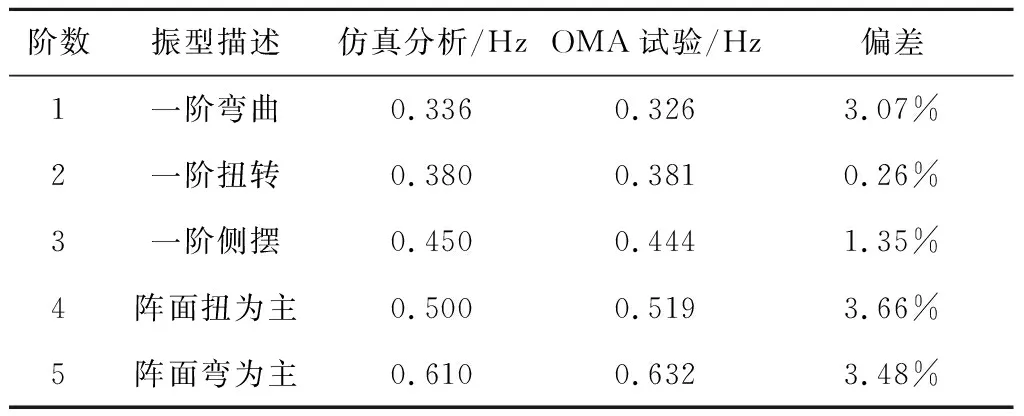
表5 柔性太阳翼仿真分析与OMA试验频率对比Table 5 Comparison of solar array’s simulation analysis andOMA test frequency
4 结 论
与传统模态试验方法相比,使用视觉测振技术测量结构振动信息具有非接触、实时性强、精度高以及信息量大等显著特点,本文通过两台CCD摄像机进行图像特征跟踪,并基于NExT-ERA算法的工况模态辨识方法,获取了柔性太阳翼模态频率、振型等动力学参数,结论如下:
1)基于双目相机视觉测振的OMA方法模态试验结果与基于基恩士位移传感器的EMA方法试验结果和有限元分析结果吻合较好,验证了视觉测振系统的准确性、有限元建模的等效性及分析方法的有效性。
2)地面模态试验中空气及重力影响不可避免,地面模态试验与有限元分析相互校验是准确预示柔性太阳翼固有模态参数的重要途径。
猜你喜欢
现代园艺(2022年17期)2022-08-23
汽车实用技术(2022年10期)2022-06-09
汽车工程师(2021年12期)2022-01-17
汽车实用技术(2021年10期)2021-06-04
舰船科学技术(2021年2期)2021-04-10
——以徐州高层小区为例
建筑技艺(2019年9期)2019-11-27
东坡赤壁诗词(2019年3期)2019-07-05
科技信息·下旬刊(2018年8期)2018-10-21
科技信息·中旬刊(2018年7期)2018-10-21
成长·读写月刊(2018年8期)2018-08-30
