
多智能体系统的非震颤固定时间一致性
2020-02-18 15:19茆汉国张建德
计算机工程与应用 2020年4期
茆汉国,张建德
南京工程学院 计算机工程学院,南京211167
1 引言
随着人工智能技术的火热发展,多智能体系统的一致性问题受到了国内外学者们的广泛关注[1],并且在机器人编队控制、无人机协同控制、虫类蜂拥、蜂群计算等领域有着广泛的应用[2-5]。
在过去的几十年中,学者们对一致性问题的研究取得了许多成果。其中,Vicsek等[6]就一群自驱粒子的相变问题提出了著名的Vicsek模型。之后,Jadbabaie等[7]运用图论的方法就Vicsek模型的一致性行为给出了理论解释。在Vicsek模型基础之上,Cucker和Smale[8]又介绍并分析了一个含有N个粒子系统的蜂拥模型,简称C-S模型。Sun等[9-10]进一步探讨了C-S模型中存在通讯时滞和随机噪声扰动的蜂拥问题。除了线性系统之外,文献[11]研究了基于事件触发的随机非确定线性多智能体系统的指数同步问题。最近,文献[12]讨论了事件触发机制下的多智能体领导跟随一致性。
总体来说,在这些系统中[2-12]实现一致(或蜂拥)都是渐进稳定的,也就是收敛时间是趋于无穷大的。但是在实际运用中往往需要多智能体系统在有限时间内实现一致,比如要实现较高的控制精度。此外,有限时间一致性具有较高的抗干扰性和鲁棒性。Wang等[13]较早地分析了动态多智能体网络的有限时间一致性问题。Sun等[14-16]继续讨论了在噪声环境下的有限时间一致性和蜂拥问题。同时,这些工作[13-16]都对实现一致性(或蜂拥)时间的上界进行了估计。
此外,一个随之而来的问题是,对有限时间上界的估计高度依赖系统的初始状态,也就是不同的初始条件可能产生不同的时间估计。在实际多智能体系统中,由于一些不确定性因素的影响,人们无法预先知道系统模型的初始状态,这就对以往有限时间一致性问题又提出了挑战。为了克服这个困难,Polyakov[17]突破性地介绍了一种新型非线性回馈控制技术,实现了闭环系统的固定时间稳定性,其最终实现稳定的有限时间上界估计与系统的初始状态无关。最近,Chen等[18]讨论了多智能体系统中的固定时间凸优化问题。Tian等[19]分析了二阶多智能体系统中含有引导者-追随者的固定时间一致性问题。文献[20]对多智能体系统固定时间协同控制进行了概述。
无论是有限时间一致性(或蜂拥)问题,还是多智能体系统中的固定时间一致性问题,其控制协议中大多含有一个符号函数sign(⋅)。由于符号函数在0点处具有非连续性,在实际控制作用中当误差趋于0的时候势必产生震颤现象。如果震颤频率过高,则会对系统本身造成一定程度的伤害。为了解决这一问题,本文设计了一个光滑连续的一致性协议,从而有效地避免了震颤现象的发生。具体地,本文旨在探索非震颤固定时间多智能体网络的一致性问题,创新性如下:
(1)实现了多智能体网络的固定时间一致性,同时对实现一致的时间上界进行了估计,其不再依赖于系统的初始状态条件。
(2)设计了新颖的一致性控制策略,解决了传统有限时间和固定时间一致性协议中存在震颤的问题,提高了系统的性能。
(3)通过运用Lyapunov稳定性理论,得到了实现固定时间一致性的充分条件,且通过数值仿真验证了理论分析的有效性和可行性。
2 问题描述
2.1 预备知识
形式上,用一个图G=(V,E)来表示N个智能体所构成的网络。V={v1,v2,…,vN}为N个智能体构成的点集。E⊂V×V为图G的边集。图G中的无向边记为aij=aji=(vi,vj)=(vj,vi)∈E。如果智能体j与智能体i(i≠j)间存在一条连接,则aij=aji=1,否则aij=0。图G的拉普拉斯矩阵记为L=[lij]∈RN×N,其中lij=-aji(i≠j),lii=-。图中一系列的连接边构成路径。如果任意两个智能体之间都存在一条路径,则图是连通的。‖x‖表示列向量x∈RN的2范数。
2.2 模型建立
网络中每个智能体的动力学方程为:

其中,xi∈RN为第i个智能体的状态,ui为待设计的一致性控制协议。
为了明确得出本文的主要结果,下面先给出固定时间一致性的定义和相关必备的引理。
定义 称系统(1)中各智能体状态在固定时间内达到一致,如果存在不依赖于初始状态的时间函数T,使得

这里,T也被称作设定时间。
引理1[21]如果存在一个连续函数V(t):[0,∞)→[0,∞),使得V正定,且存在正实数c>0,0<ρ<1满足V̇(t)≤-cVρ(t),t≥t0,那么V1-ρ(t)≤V1-ρ(t0)-c(1-ρ)(t-t0),t0≤t≤t*,且V(t)=0,t≥t*,其中t*=t0+
引理2[22]如果存在一个连续的径向无界函数V:Rn→R+∪{0},使得:
(1)V(x)=0⇔x=0;
(2)任意状态x(t)满足不等式:
D*V(x(t))≤-(αVl(x(t))+βVm(x(t)))k
其中,参数α,β,l,m,k>0,且lk<1,mk>1。D*V(x(t))为函数V(x(t))的右上界导数。那么,原点为全局固定时间稳定点,且设定时间

引理2给出了一个相对保守的设定时间估计。考虑以下情形:常数l、m满足形式l=1-γ>1,可以得到更为精确的时间估计,见下述引理。
引理3[22]如果存在一个连续的径向无界函数V:Rn→R+∪{0},使得:
(1)V(x)=0⇔x=0;
(2)任意状态x(t)满足不等式:
D*V(x(t))≤-αVl(x(t))-βVm(x(t))
其中,参数α,β>0,D*V(x(t))为函数V(x(t))的右上界导数。那么,原点为全局固定时间稳定点,且设定时间

引理4[23]如果y1,y2,…,yN≥0,那么

引理5[24]对一个连通无向图G而言,其拉普拉斯矩阵L有以下性质:任意x=[x1,x2,…,xN]∈RN,有。可知L为半正定,0是其单特征值,对应N元特征列向量1(每个元素都是1)。不妨设L的特征值为0,λ2,…,λN,并满足0<λ2≤…≤λN。此外,如果1Tx=0,那么xTLx=λ2xTx。λ2(L)也称作拉普拉斯矩阵L的代数连通度。
3 主要结果
为实现多智能体网络的非震颤固定时间一致性,设计如下的一致性协议:

其中,k1>0,k2>0为控制增益,A=[aij]∈RN×N,B=[bij]∈RN×N为多智能体之间信息传输网络的邻接矩阵。p、q、r、s为正奇数,且满足p<q,r>s。
注1受文献[25]的启发,本文设计了上述固定时间非震颤一致性协议(2)。与文献[13-16,18-19]中的控制协议相比,本文所设计的控制协议(2)不再使用传统的符号函数sign(⋅),即式(2)是光滑连续型的一致性协议,从而有效地避免了震颤现象的发生。
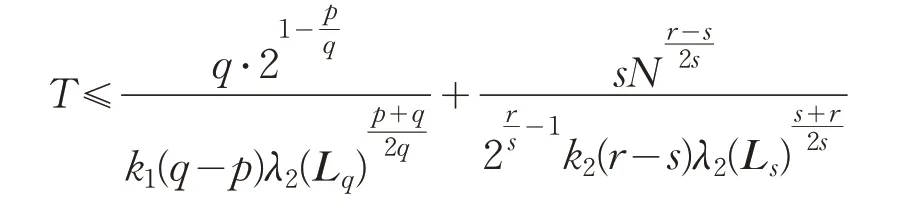
定理 无向连通多智能体网络中的各智能体i在一致性协议(2)的作用下,N个智能体能在固定时间内达到平均一致状态,且达到一致的时间上界满足:
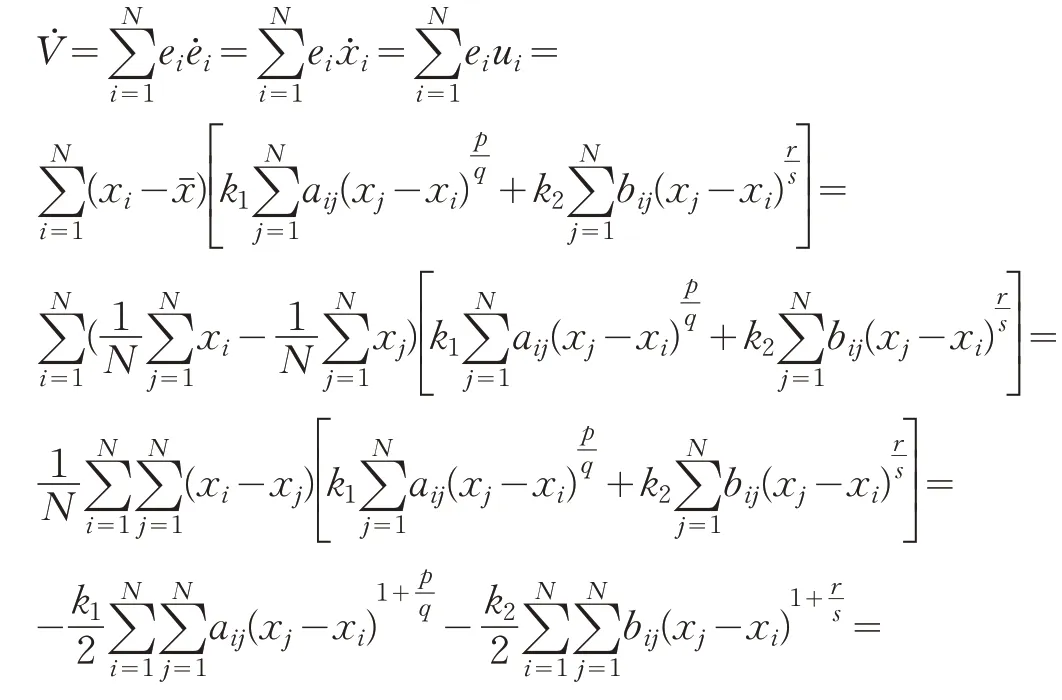
证明 考虑以下Lyapunov函数:

对上述Lyapunov函数求导,可得:

根据引理4,可得:

再根据引理5,可以得到:
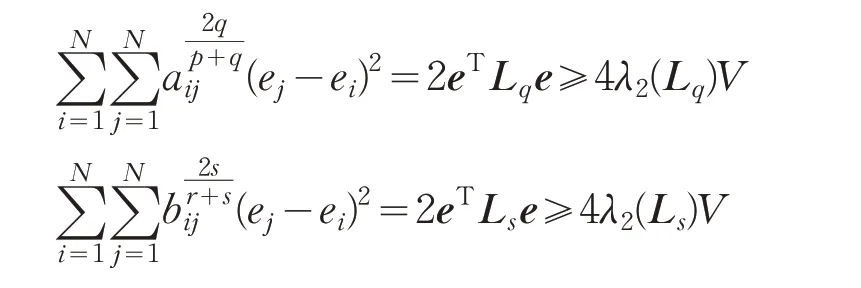
其中,Lq和Ls分别为权图和的Laplacian矩阵。λ2(Lq)和λ2(Ls)分别表示矩阵Lq和Ls的代数连通度。
那么有:
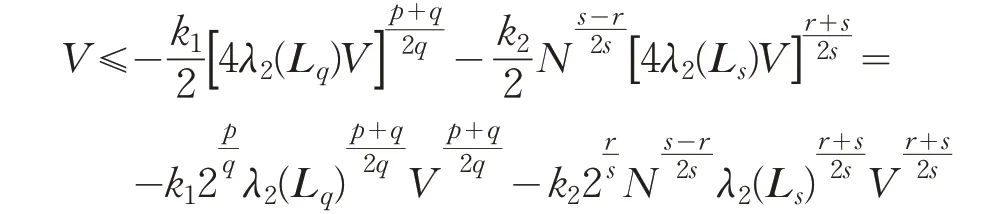
最后再由引理2可知,多智能体网络(1)可在固定时间内实现一致,且设定时间:

证毕!
根据引理3,可直接得到以下推论:
推论1在一致性协议(2)的作用下,如果参数p、q、r、s满足,且γ>1,那么无向连通多智能体网络(1)可以在固定时间Tmax:=内实现一致性。
如果控制协议(2)仅含有第一项,那么利用引理1可推导出下述推论。
注2控制协议(2)中第一项的作用是初步实现有限时间多智能体网络的一致性。但是从推论2可以看出,最终实现有限时间一致性的时间上界估计依赖于智能体系统的初始状态。类似地,文献[13-16]中对实现有限时间一致性时间上界的估计也高度依赖系统中各智能体的初始状态。为了摆脱这一束缚,本文进一步在(2)中设计了第二项,其作用是实现固定时间一致性,即智能体系统(1)在控制协议(2)的作用下达到有限时间一致性的时间上界估计与系统的初始状态无关。这样,对实现有限时间一致性的时间上界估计就可以事先根据实际需要,通过选取合适的控制增益k1、k2和参数r、s、p、q的值来调节。这是文献[13-16]所不及的,同时也是固定时间一致性与有限时间一致性的本质区别。另一方面,本文与文献[18-19]都对实现固定时间一致性的时间上界进行了估计。因为本文和文献[18-19]关于时间上界的估计式中的增益和参量选取都比较灵活,可根据现实需要进行适当选取,所以对估计值之间的比较并没有特殊意义。本文与文献[18-19]相比,其优点是本文所采取的控制策略是连续光滑型的,能够有效地消除震颤现象。
4 数值仿真
这里通过一个数值例子来验证理论结果的有效性和可行性。不妨设智能体网络的规模为N=5,其拓扑如图1所示。控制增益取k1=1,k2=2,参数p=1,q=3,r=5,s=3。各智能体初始状态值xi(0)从区间[-10,10]中随机选取。

图1 多智能体网络拓扑
由图2可以发现,各个智能体状态能够在固定时间不超过2.5 s内达到一致。同时,图3给出了控制协议(2)的演化轨迹。可以看出,这些曲线都是光滑的,不存在震颤现象。为了进一步验证固定时间一致性能够摆脱对系统初始状态的依赖,本文随机选取了6组不同的初始值进行模拟。图4给出了完全误差E(t)=‖ ‖e(t)轨迹。可以发现,对于任意的初始条件,多智能体网络系统总能在2.5 s内趋于一致。
5 结束语

图2 智能体x i(i=1,2,…,5)状态变化轨迹

图3 控制协议ui(i=1,2,…,5)的演化轨迹

图4 完全误差轨迹
本文研究了多智能体网络的固定时间一致性问题。一方面,克服了传统有限时间一致性问题对智能体系统初始状态的依赖性。另一方面,所设计的控制协议不再含有符号函数,解决了传统带有符号函数一致性协议中的震颤问题,提高了多智能体网络系统的性能。并且利用经典的Lyapunov第二方法得到了实现固定时间非震颤一致性的充分条件。在后续工作中可进一步考虑随机噪声和时滞所带来的影响,以及时间与能量的关系问题。
猜你喜欢
公民与法治(2022年5期)2022-07-29
新世纪智能(数学备考)(2021年9期)2021-11-24
教学考试(高考物理)(2021年5期)2021-11-08
速读·下旬(2021年11期)2021-10-12
中学生数理化·中考版(2021年3期)2021-07-22
中医眼耳鼻喉杂志(2021年1期)2021-07-22
新世纪智能(数学备考)(2020年9期)2021-01-04
中学生数理化(高中版.高考数学)(2020年9期)2020-10-28
大东方(2019年12期)2019-10-20
科学与财富(2017年22期)2017-09-10
