基于神经网络的分布式被动传感器信息融合技术
2020-02-18 03:52李洪瑞
兵工学报 2020年1期
李洪瑞
(江苏自动化研究所,江苏 连云港 222061)
0 引言
分布式传感器探测信息融合系统的主要难点和关键之一在于信息关联,尤其对于被动探测系统,除了关联问题之外,各单传感器探测系统还存在目标估计与定位难题[1-3],被动信息关联和定位相互依赖和制约,也制约了对分布式被动信息系统关键问题的解决。造成关联和定位困难的根本原因是被动观测系统只能获得目标的角度信息,在二维系统中测量量为目标方位信息,这种相对不同观测平台的不完全的、相对的量测量,在融合处理中存在以下困难:
1)难以对不同传感器方位进行时间和空间一致处理。在不同传感器测量的目标方位是相对本测量传感器的不完全相对量测量,因此很难把它们一致到统一的坐标系中。同样,也很难在时间上进行统一,因此传统方法[1]要求不同传感器进行时间同步观测。
2)难以用方位对比进行信息关联。由于不同观测传感器探测同一目标方位的期望值并不相等,因此无法对方位量测进行比较,确定它们是否源自同一目标,这与单传感器方位信息融合情况不同。
3)难以消除虚假目标。当多个传感器探测到多个目标方位时,通过互联构成的可能目标数(随着传感器和目标数的增加)呈组合增长,其中大量的目标为方位线交叉点上的虚假目标,造成大量计算,而且消除困难。
4)定位与关联相互依赖和制约。原理上,二者任何一个都不能独立或优先解决。由于单传感器纯方位系统目标定位完全依赖观测平台的有效机动,如果传感器平台未施行有效机动,则各种传统的[4]和新的、先进的估计方法都是无效的[5-8];而且在目标运动参数不确定的情况下,不能对不同平台方位和序列建立关联关系。因此对信息关联与目标定位问题采用传统分步处理方法处理,存在原理相悖。
关联是各种融合系统需要面对的技术难题,其性能直接影响到信息融合的性能,一直以来受到理论界和工程界的关注,当前针对具体的融合系统已提出了许多解决办法,例如用于量测关联的集合论描述法[1]、近邻域法、聚类算法、有限集多假设关联法[7]、计算智能算法和联合概率数据互联法以及神经网络联合概率数据互联法[9-10]等,多平台交叉定位后进行点迹关联法[11],模糊关联法或灰关联法等[12-14]。这些方法都不同程度地受到平台和目标数量的影响。
信息融合结构是融合系统不可回避的问题,它决定了采取何种信息融合算法[1],例如典型的分布式信息融合、集中式信息融合、混合式信息融合等,各种信息融合结构各有利弊,应用中很难一以概之,必须依据实际系统需求确定相应的结构,被动信息融合系统尤其如此[10,15]。
本文针对分布式被动传感器信息融合中信息关联和目标估计关键问题,采取融合中心分层处理的混合式信息融合结构,建立全局最优互联模型和非线性估计模型,并应用一种Hopfield型神经网络的求解算法,仿真结果表明这是分布式被动信息融合系统的一种有效解决方案。
1 问题描述
1.1 多源信息关联问题


满足上述条件的所有矩阵全体构成关联解空间Λ,多源信息关联问题就是在Λ中寻找出唯一正确的关联解。
1.2 多目标估计问题
对于一个关联解J=(jts)n×m,其对应的测量集为Z(J)={Z1,Z2,…,Zn},后验概率密度函数记为pJ=p(ZJ|X),其中X=(X1,X2,…,Xt,…,Xn),Xt为目标t的待估参数,例如位置、速度、航向等。

(1)
根据1.1节定义可知,关联解空间Λ的不同元素个数为r(Λ)=(n!)m-1。因此随着目标数和传感器数的增加,r(Λ)呈组合式上升,在解空间Λ寻求唯一的正确关联解一般很困难,其寻优问题为非确定性多项式(NP)计算复杂性难题。为了解此计算复杂性难题,本文从信息融合结构和算法入手:一是研究采取分层信息融合结构,避免上述多重组合问题;二是研究应用一种优化神经网络算法,避免关联中的组合计算。
2 信息融合结构
如图1所示为融合中心所采取的传感器有序分层信息融合结构。在这种信息融合结构中,首先,按一定顺序将传感器优先级进行排序,优先者排前;其次,在融合处理中心依次构建m-1个有序的融合处理节点;第三,按节点顺序进行传感器信息融合处理,每个节点仅对两个信息源进行融合处理,在最后一个节点输出融合结果。优先顺序一般可以按照传感器精度、探测范围、分布位置等来设置。
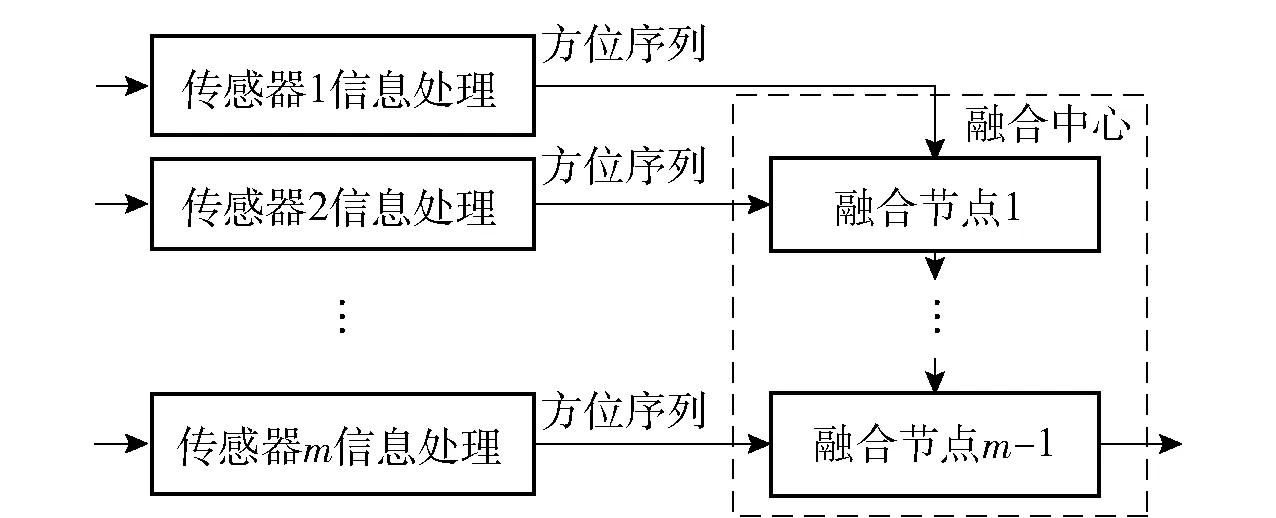
图1 融合中心有序分层信息融合结构
这种处理结构由于每个融合节点考虑了两个传感器信息,解决了单传感器测量系统的不可观测问题。在计算量方面,分层信息融合处理时可能目标数为(m-1)n!,它与多传感器信息融合时可能目标数之比为(m-1)n!/(n!)m-1,因此分层信息融合计算量降低了(n!)m-2/(m-1)倍。这表明当传感器数目m>2时,分层信息融合处理结构的计算量是大量减少的。
然而,进行双传感器信息关联处理时,可行关联的目标总个数达到n!,其计算量依然具有NP计算复杂性,在目标数目较大时,一般信息融合系统难以承受。为此,本文将应用一种优化Hopfield型神经网络建立双传感器信息关联算法。
3 全局最优关联模型
在进行双传感器信息的关联处理时,将传感器1目标的排列顺序固定,则双传感器信息的关联由传感器2的目标排列顺序确定。设k时刻2个探测传感器的融合输出分别为
(2)
式中:


(3)
(xt(k),yt(k))为目标位置参数,(xos(k),yos(k))为传感器位置参数,ns(k)为测量噪声,t=1,2,…,n,s=1,2.
定义矩阵
C=(cij)n×n
(4)
称为可行关联矩阵,其元素仅为0或1:
(5)
且满足如下约束条件:

设l1,l2,…,ln为1,2,…,n的一个排列,则L=(l1,l2,…,ln)构成一个可行关联解。若可行关联矩阵Cl的元素满足(Cl)jli=1,而其他元素等于0,则其对应的可行关联解L=(l1,l2,…,ln);反之,若有可行关联解,则矩阵Cl的(Cl)tlt=1,而Cl的其他元素等于0,即Cl是一个可行关联矩阵。因此,一个可行关联矩阵完全表达了2个传感器信息间的关联关系。将所有可能的可行关联矩阵集合记为
C(n)={C1,C2,…,CN},
(6)
式中:N=n!.则在可行关联矩阵为Cl∈C(n)(1≤l≤N)的假定下,各目标对应的方位序列为



(7)
设方位测量的条件概率密度函数为p(Z|Cl,X),则可构建解关联和目标估计问题的全局联合优化模型为
(8)
其等价描述的模型为
(9)
显然
p(Z|Cl,X)=p(Z(Cl)|X)=

(10)
因此上述联合优化模型可分解为如下全局最优关联模型和最优估计模型:
(11)
(12)
式中:dij称为互相关指数。
本文给出了基于Hopfield神经网络的全局优化关联求解算法,过程如图2所示,其重点在于解全局关联优化问题(11)式和解参数优化问题(12)式,相应算法将分别在第4、第5节中描述。

图2 神经网络全局优化关联求解过程
4 多目标估计
设目标匀速直线运动,待估参数取为目标初始直角坐标位置和坐标轴方向速度分量,即Xt=(x0ty0tvxtvyt)T=(xt1xt2xt3xt4)T,在已知关联矩阵Cl的条件下,有
(13)

(14)
令
(15)
将方位测量代入得
(16)
式中:
(17)
(18)
因此得到目标估计问题的最优化模型为
(19)
上述优化模型本质是多目标运动参数的估计问题,其算法可见文献[16]的非线性估计算法和文献[17]的滤波算法。
5 神经网络关联求解
5.1 神经网络构造
为了从(11)式求全局最优关联解,类似于多目标跟踪问题[9],构造一个n×n维的神经网络阵列V=(Vij)n×n,行对应于传感器1的目标,列对应于传感器2的目标,阵列中神经元的状态对应可行关联矩阵的元素,对应关系为
(20)
当cij=1时,表示传感器1的目标i与传感器2的目标j关联。定义能量函数:
(21)

(22)

Cδjs+D+Edijδitδjs,

(23)
式中:δij为Kronecker-δ函数,当i=j时δij=1,否则δij=0.
5.2 神经网络模拟运行
建立动态系统方程:
(24)
显然g′(u)>0.动态系统运行时,能量的变化率为
(25)
可见,能量函数变化呈下降状态,并随着时间的推演达到能量极小。
初始时刻取t0、迭代步长取Δt,对动态方程离散化处理可得
(26)
6 仿真计算实例
在仿真计算中,模拟4个被动传感器探测、15个目标的应用场景(m=2,n=15),传感器和目标的初始参数如表1(包括它们的初始坐标、速度、航向)所示,传感器(方位)测量误差均方差分别为0.50°、0.70°、0.90°、1.20°,按传感器测量精度分层,采样和系统融合周期为10 s.在模拟神经网络运行中,能量函数系数取为:A=10,B=10,C=200,D=50,E=150,强调关联指标的优化;动态系统的数字仿真参数取为t0=1 s和Δt=0.005 s,运行终止条件为能量函数变化率ΔE小于ε=0.000 01,选取初值为
Uij(0)=ΔUij-U0ln(n+1),
(27)
式中:ΔUij为[-U0,U0]上的随机数,U0=0.1.
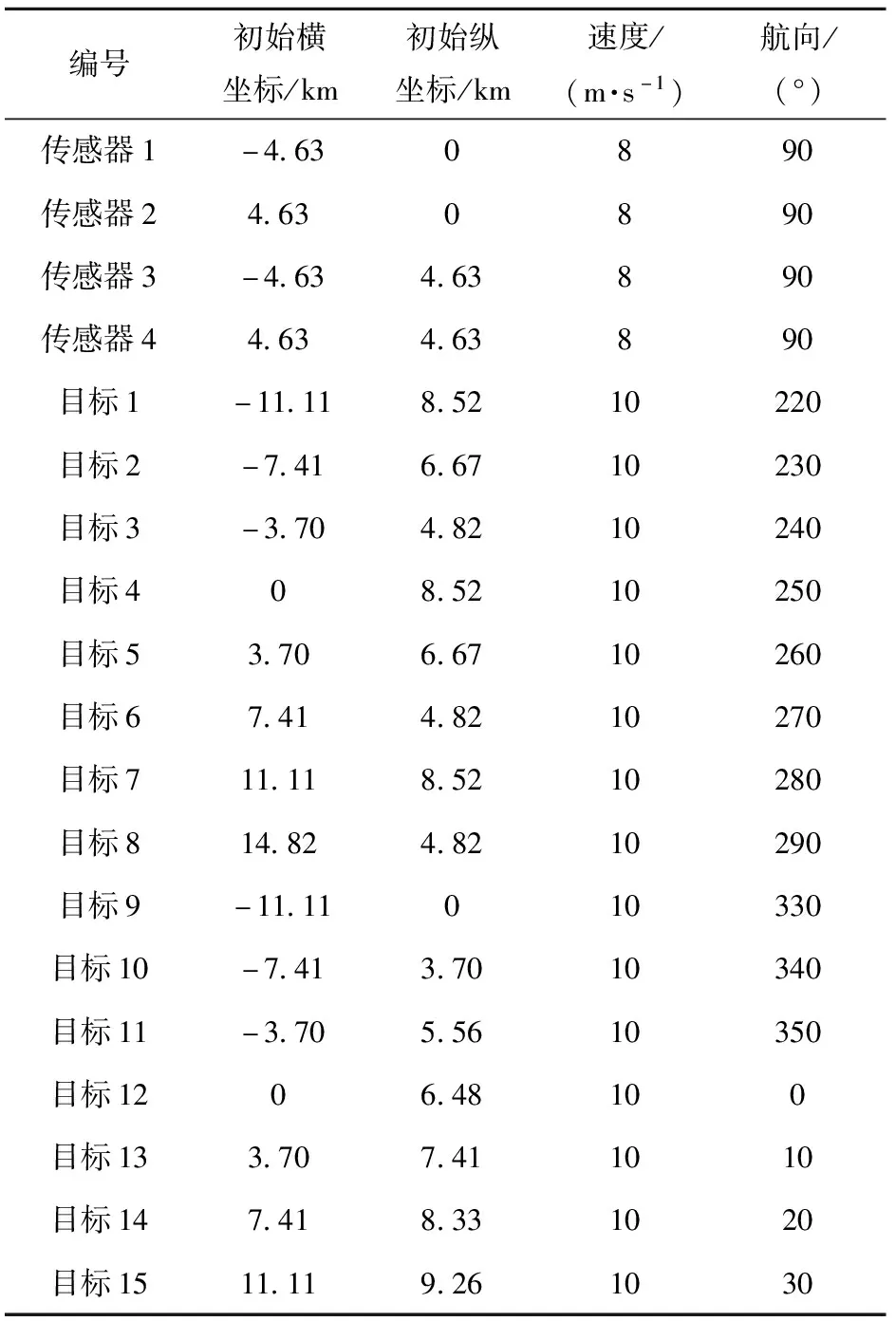
表1 仿真态势初始参数

图3 分布式被动传感器信息融合态势

图4 分布式被动传感器信息融合目标参数误差
目标参数估计采用文献[16]中的四维非线性模型。仿真结果的融合态势如图3所示,蒙特卡洛仿真统计的目标参数误差如图4所示。在100次的蒙特卡洛和20 min观测共120次采样周期的计算中,模拟神经网络关联正确率达到94%.在对如表1的目标态势参数进行随机扰动,模拟新的态势进行蒙特卡洛计算,统计得到的关联正确率为90.0%.
在耗时方面,从传感器获得测量到输出多目标运动态势,用i5-3470型4核处理器、8 GB内存的个人计算机,平均每个处理周期耗时0.47 s.在传统组合优化状态下,在15个目标情况下,解空间状态个数为1.30×1012,如果一次搜索耗时1/100 ms,则每个融合处理周期平均耗时需要时间约360 h.
从仿真计算看,用神经网络解全局关联在运行实效方面具有相当明显的优势,使目标数较大情况下全局关联优化组合的不可解问题变得可解。
在神经网络运行参数不变的情况下,对仿真态势进行扰动,仿真结果显示,信息融合性能受到一定影响,表明神经网络存在一定的不稳定性以及对态势的依赖性,这些因素在应用中值得重视。
7 结论
本文针对分布式被动传感器信息融合的特点、难点,研究了信息融合结构、信息关联、目标估计等关键技术。通过应用一种混合式有序分层信息融合体系结构,建立了用于双传感器信息融合的纯方位信息关联与参数估计联合优化模型,并采用神经网络算法求解最优关联解。本文所用方法避免了多传感器信息的多重组合和多目标关联中的组合计算,有效解决了定位与关联相悖的问题。
仿真结果表明,本文所提出的信息融合结构及其联合优化模型在数据互联正确率、目标参数估计精度等性能上均表现出良好的性能,关联和估计稳定。本文所采取的解决方法可以应用于多被动声纳、电子支援措施等无源探测信息融合领域。
猜你喜欢
舰船科学技术(2022年11期)2022-07-15
煤气与热力(2022年2期)2022-03-09
北京航空航天大学学报(2021年4期)2021-11-24
幼儿园(2021年12期)2021-11-06
当代陕西(2019年15期)2019-09-02
电子制作(2019年24期)2019-02-23
学苑创造·A版(2018年11期)2018-02-01
读者(2017年5期)2017-02-15
小学生时代·大嘴英语(2015年7期)2015-11-23
棋艺(2014年7期)2014-09-09