复杂不确定系统可靠性分析的贝叶斯网络方法
2020-02-18 03:21王海朋段富海
兵工学报 2020年1期
王海朋,段富海
(大连理工大学 机械工程学院,辽宁 大连 116024)
0 引言
现代可靠性工程研究对象已发生从简单到复杂、从组件到系统、从单状态到多状态的转变,呈现出复杂性、不确定性、集成性和多态性等新特点。在实际工况中,由结构复杂、可靠性数据不足等因素导致的复杂多态系统可靠性分析不确定性问题,引起了学者的广泛关注。随之发展起来的系统可靠性分析方法有:模糊故障树[1-2]、Takagi-Sugeno(T-S)模糊故障树[3-4]、模糊Petri网[5-6]、生成函数法[7-8]和贝叶斯网络(BN)方法[9-10]等,其中BN不仅能够清晰、有效地表达多态系统的复杂逻辑关系,而且具有独特的双向推理机制,特别适合于高可靠性、小子样复杂系统的可靠性分析,已应用于可靠性分析[11-12]、风险评估[13-14]、故障诊断[15]等领域。
模糊数学和灰色系统理论是目前最活跃的两种不确定性系统理论[16],为基于BN的不确性分析提供了重要理论依据。文献[4]针对BN方法和T-S故障树方法的不足,结合模糊数学,将T-S故障树引入BN中,构建出一种模糊可靠性评估模型,并对巷道运输车液压系统进行了可靠性评估。文献[17]将直觉模糊集应用到BN中,提出一种能够精确确定BN各根节点状态发生概率的方法。文献[18]将灰色系统理论引入BN模型中,解决了组件之间故障状态难以界定的问题。文献[19]用模糊数学和灰色系统理论对油轮设备进行了故障模式和影响分析。文献[20]将模糊技术引入BN可靠性模型中,赋予BN解决不确定信息的能力,并以液压系统验证所提模型有效。
基于BN的不确定分析,或引入灰色系统理论,或引入模糊技术,虽然取得了较好的研究成果,但对现代系统的复杂性、不确定性及多态性考虑仍不完善,存在问题有:1)对故障状态描述的隶属度函数的模糊支撑半径都为定值,如文献[4,18]等,这虽然能解决某些不确定性条件下的多态系统可靠性分析问题,但难免在隶属度函数的构建过程中引入过多主观信息,导致系统可靠性分析结果出现偏差;2)将系统与组件间的故障逻辑关系假设为确定的,如文献[10,20]等,这忽略了由于可靠性数据不足、运行环境复杂多变等因素导致的组件和系统间逻辑关系的不确定性,难以满足对复杂系统可靠性分析的要求。
本文针对以上问题,将模糊数学和灰色系统理论引入多态BN的可靠性分析模型中,提出一种基于不确定隶属度函数和区间特征量的复杂系统可靠性分析方法。用含变量的隶属度函数来表征组件故障状态,不仅避免了人为主观因素对隶属度函数选择的影响,而且将组件故障状态的不确定性有效量化;用区间灰数描述条件概率表(CPT)中的确定值,有效表达了组件和系统间不确定的故障逻辑关系;构建出含模糊支撑变量的系统可靠性特征量参数规划模型,将可靠性特征量的不确定性量化,并表示为区间;最后以卫星推进系统为例,验证了所提方法的有效性。
1 灰色模糊BN方法
1.1 可靠性建模与分析的灰色模糊BN方法
BN由有向无环图(DAG)和CPT组成,是一种概率图型模型。DAG由节点和有向边组成。节点可表示故障状态、故障模式等变量。根节点为不具有父节点的节点;叶节点为不具有子节点的节点;其他节点为中间节点[20]。有向边由父节点指向子节点。CPT表示节点间因果故障逻辑关系,即组件和子系统、系统间故障逻辑关系。
模糊数学借助隶属度函数研究不确定性问题,本文构建含模糊支撑半径变量r的梯形模糊数(TrFN)来描述组件和系统在故障演化过程中某时刻故障状态的模糊不确定性,主要包括两方面:1)人为主观因素选择隶属度函数引起的不确定性(将描述故障状态隶属度函数的模糊支撑半径设定为定值引起的不确定性);2)各故障状态间的模糊不确定性。
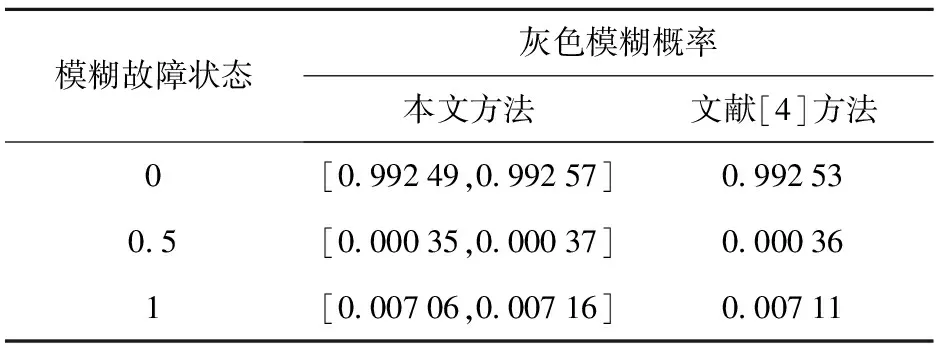
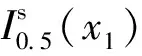
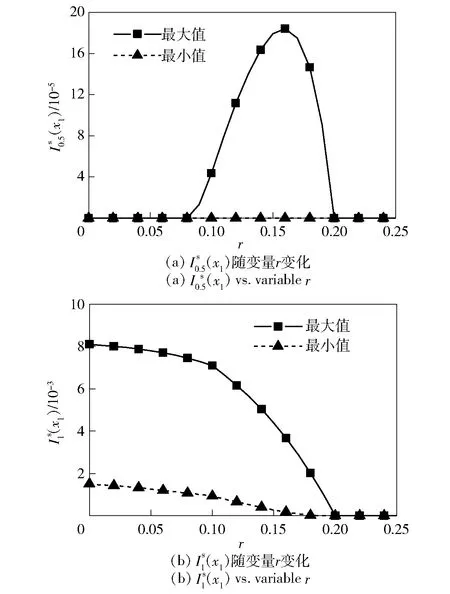
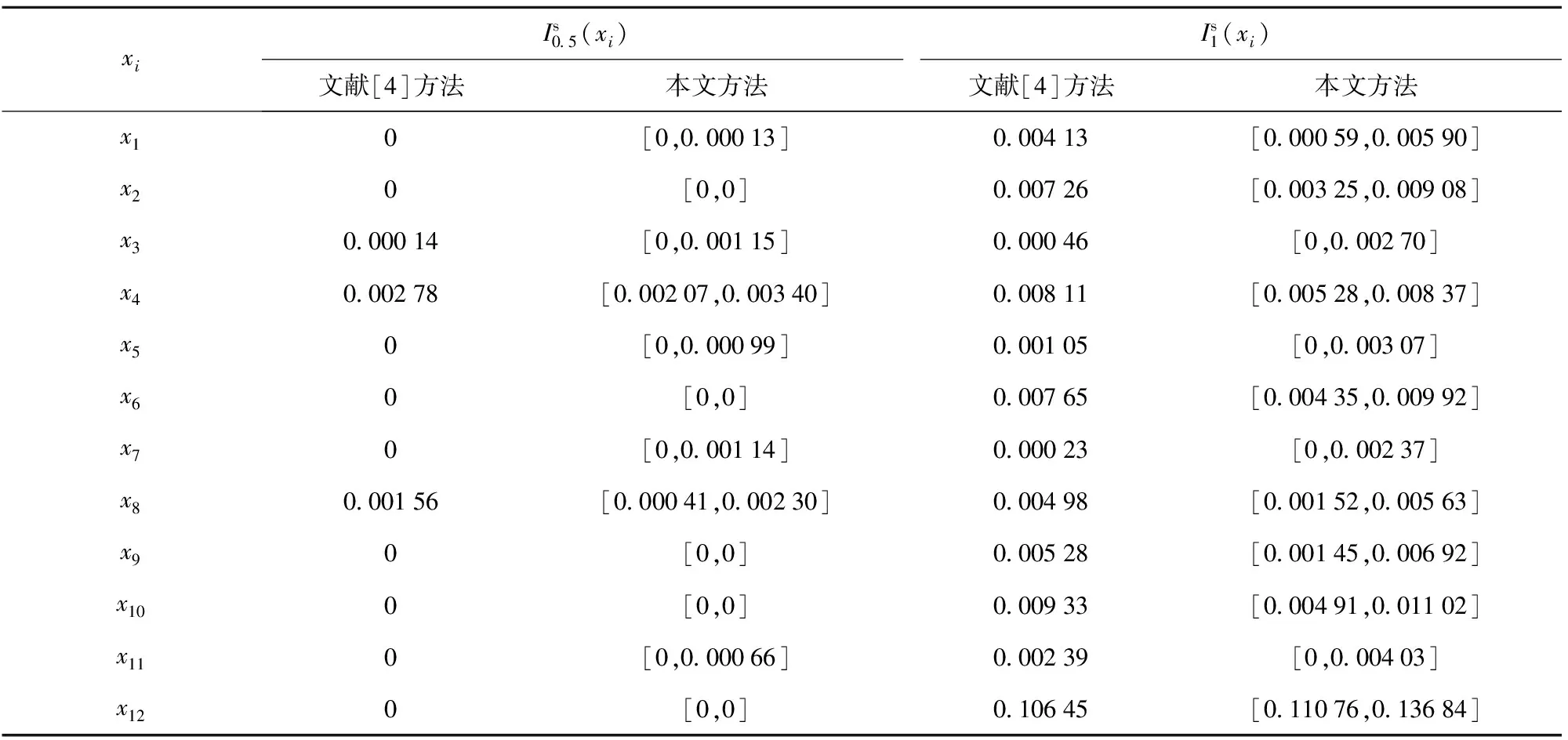
灰数是灰色系统基本单元,是描述只知取值范围而不知其确切值的数;区间灰数是灰数的一类,是指既有下界a、又有上界b的灰数,记为⊗∈[a,b],其中a,b∈R,且满足a 基于传统BN,系统可靠性建模与分析的灰色模糊BN方法步骤框图如图1所示。 图1 可靠性建模与分析的灰色模糊BN方法 图1所示方法将传统节点变量推广到灰色模糊BN节点,表达组件和系统在故障演化过程中某时刻故障状态的模糊不确定性;将传统的CPT推广到含区间灰数的CPT,表达组件和系统间具有灰色系统信息特征的不确定故障逻辑关系。步骤如下: 1)分析系统基本原理,明确各组件、系统的故障状态和故障模式,建立系统BN模型的DAG; 2)根据组件的故障状态和故障模式,引入含变量r的TrFN描述组件和系统在故障演化过程中某时刻故障状态的模糊不确定性,见1.2.1节; 3)构建含区间灰数⊗的CPT描述组件和系统间具有灰色系统信息特征的故障逻辑关系,见1.2.2节; 4)根据步骤1~步骤3和相应的系统可靠性特征量定义,得出相应的系统可靠性特征函数,见1.2.3节; 5)以系统可靠性特征函数为目标函数,以区间灰数⊗的取值区间为约束条件,构建出可靠性特征量参数规划模型,用优化算法分别进行叶节点可靠性分析和根节点重要度分析,根据分析结果评估系统可靠性和组件重要度,见1.2.4节。 1.2.1 灰色模糊BN节点的故障状态描述 实际工程中,组件和系统从正常工作到完全故障的演化过程中往往会表现出多种故障模式和多种故障状态,且各故障状态间没有严格界限,具有一定的模糊不确定性。不失一般性,本文构建含模糊支撑半径变量的梯形隶属度函数来表征组件和系统的故障状态。 (1) (2) 图2 含变量r的组件故障状态的隶属度函数 由图2可知,梯形隶属度函数的确定性区域和不确性区域随变量r的变化而变化。由图2得节点各故障状态隶属度的计算公式如表1所示。 1.2.2 灰色模糊BN的CPT描述 复杂系统拥有大量交互成分,内部关系复杂,且运行环境复杂多样,导致其故障模式和故障机理复杂多变,使得组件对系统可靠性影响具有不确性;且受到研制成本和研制周期等影响,系统可靠性特点和规律的全部信息,难以在预定的时间内获得,这都导致组件和系统间的故障逻辑关系具有灰色系统信息特征,使得组件和系统间的故障逻辑关系难以用确定值描述。为准确描述组件和系统间故障逻辑关系,用区间灰数描述BN中条件概率数值,n个包含m种状态节点的灰色模糊BN的CPT,如表2所示。 表1 组件故障状态的隶属度 表2 灰色模糊BN的CPT 表2中每行代表当父节点不同故障状态时,子节点为某故障状态的条件概率,如P(y=i|x1,x2,…,xn)=⊗1,1,…,1,i表示在节点x1~xn故障状态都为0时,节点y为故障状态i的概率等于区间灰数⊗1,1,…,1,i,⊗1,1,…,1,i∈[0, 1],且满足⊗1,1,…,1,1+…+⊗1,1,…,1,i+…+⊗1,1,…,1,m=1. 1.2.3 灰色模糊BN的多态系统可靠性分析 灰色模糊BN不仅能够表征和量化组件和系统不确定的故障状态,还能表达组件和系统间复杂多变的逻辑关系。此外,利用BN独特的双向推理能力,可有效分析系统叶节点可靠性、系统根节点的重要度等系统可靠性特征量。 灰色模糊BN用含有变量的隶属度函数来描述节点的故障状态,并不是用简单的隶属度函数来描述;用区间灰数来表达组件和系统间不确定性的故障逻辑关系,并不是用确定值来表达。为区别传统BN定义,在灰色模糊BN中将可能性、发生概率、状态重要度、关键重要度拓展定义为灰色模糊可能性、灰色模糊概率、灰色模糊状态重要度、灰色模糊关键重要度,详见1.2.3.1节和1.2.3.2节。 1.2.3.1 灰色模糊BN叶节点可靠性分析 1.2.3.1.1 叶节点各故障状态分析 设灰色模糊BN根节点为xi(i=1,2,…,n),中间节点为yj(j=1,2,…,n),叶节点为T;若各根节点当前故障状态为x′1,…,x′n,则叶节点T处于故障状态Tq的灰色模糊可能性为P⊗(T=Tq),应用桶消元法计算过程为 P⊗(T=Tq)= (3) 1.2.3.1.2 叶节点各故障状态的故障概率分析 (4) 1.2.3.2 灰色模糊BN根节点重要度分析 1.2.3.2.1 灰色模糊状态重要度 P⊗(T=Tq|xi=0)],0}, (5) 式中:P⊗(T=Tq|xi=x′i)表示节点xi故障状态为x′i时,叶节点T故障状态为Tq的灰色模糊可能性;P⊗(T=Tq|xi=0)表示根节点xi故障状态为0时,叶节点T故障状态为Tq的灰色模糊可能性。 1.2.3.2.2 灰色模糊关键重要度 在故障树分析中,关键重要度是一个变化率的比,表征底事件故障概率的变化率引起顶事件故障概率的变化率。借鉴此思想,在多态系统中,关键重要度是指某一组件发生可靠性退化的变化率引起系统可靠性退化的变化率[22],因此可给出灰色模糊多态BN中根节点xi的关键重要度定义: (6) 1.2.4 系统可靠性特征量的求解算法 用含有模糊支撑半径变量的梯形隶属函数表征系统组件故障状态,用含区间灰数的CPT描述组件和系统间不确定的故障逻辑关系时,构造出如(7)式所示的参数规划模型,以(3)式~(6)式中某个系统可靠性特征量的表达式为目标函数,可对其进行求解。 max(min)f(⊗1,⊗2,…,⊗n), (7) 式中:ai和bi表征CPT中当父节点不同故障状态时,子节点处于某故障状态条件概率的最小值和最大值。 该参数规划本质是由一系列区间灰数⊗i在确定的区间[ai,bi]内求解函数极值的问题,可用商业优化软件(如MATLAB、Isight等)求解。 另外,大型复杂多态系统,组件的数量多,组件和系统间不确定的故障逻辑关系更加复杂,这使得(7)式中的目标函数变复杂,以及约束条件的数量增加,可借助Lingo、Gurobi、CPLEX等专业求解器来求解,计算量可控。对节点间可靠性特征量的大小比较,可根据Nakahara等[23]提出的区间大小比较规则,来评判特征量大小。 卫星推进系统是实现卫星变轨、姿态控制、轨道保持、定位和离轨等任务的动力系统,其性能的好坏直接影响卫星的控制精度和寿命。据统计,受外太空恶劣环境的影响,卫星推进系统故障概率相对较高,分析其可靠性非常必要。为验证所提灰色模糊BN方法的有效性,本节以卫星推进系统为案例,进行演示验证,并与文献[4,24]中的方法进行对比。 单组元推进系统结构小巧紧凑,是中低轨卫星领域最常用的一种推进系统,主要包括贮箱、加排阀、过滤器、自锁阀、压力传感器和推力器,如图3所示。贮箱为推力器提供推进剂;加排阀为贮箱加排增压气体和推进剂;过滤器用于过滤掉推进剂中的杂质,防止堵塞管道系统;自锁阀用来控制管路开关;压力传感器实时监测管道压力;推力器为系统提供推进力。 图3 单组元推进系统结构 单组元推进系统采用双备份结构,推力器1支路和推力器2支路只要有一个正常工作,系统就能正常工作;如果两支路都发生故障,则系统处于故障状态;由于组件与系统间不确定性的故障逻辑关系,当任一支路故障,另一支路半故障时,系统可能故障,可能半故障,也有可能正常工作。根据图3构造单组元推进系统BN,如图4所示。 图4 单组元推进系统BN 表3 节点y1的CPT 表4 节点y2的CPT 2.2.1 叶节点故障状态分析 已知各根节点当前故障状态为x′1=0.3,x′2=0.4,x′3=0.2,x′4=0.6,x′5=0.3,x′6=0.7,x′7=0.1,x′8=0.7,x′9=0.3,x′10=0.4,x′11=0.2,x′12=0.8.由表1可知各根节点故障状态的隶属度,如表6和表7所示。根据表6和表7,由(3)式和(7)式,运用MATLAB软件优化工具箱提供的fmincon函数,可求出叶节点T在不同故障状态下的模糊可能性,即叶节点T灰色模糊可能性的极值随变量r的变化曲线,如图5所示。由图5可知: 表5 节点T的CPT 1)从系统可靠性的角度分析,在已知组件当前故障状态条件下,由于结构复杂、可靠性数据不足等原因导致的不确定性,叶节点T灰色模糊可能性(系统可靠度)可能在两条曲线和两条曲线间区域的任一点取值,显然,由不确性问题导致系统可靠性分析结果的差别较大。 2)当0≤r<0.2时,随着变量r增大,根节点的不确性减小,叶节点T各故障状态灰色模糊可能性上、下限值的差值总体呈现减小趋势。以叶节点T=0的灰色模糊可能性为例,如表8所示。 3)当0.2≤r≤0.25时,由各根节点求出节点y3不确定性为0,求出叶节点T各故障状态灰色模糊可能性均是一条与变量r值无关的直线。 表6 二态根节点故障状态的隶属度 表7 三态根节点故障状态的隶属度 图5 叶节点T的灰色模糊可能性 表8 叶节点T=0的灰色模糊可能性 表9 叶节点T处于不同故障状态的灰色模糊可能性 由表9可知: 1)灰色模糊BN方法得到的结果包含文献[4]中的结果,验证了所提方法的有效性。 2)区间大小比较规则,得P(T=1)>P(T=0)>P(T=0.5),表征在当前故障状态下,推进系统出现故障的可能性和无故障的可能性均高于半故障的可能性,且系统发生故障的可能性最大。 2.2.2 叶节点故障概率分析 根据工程实际和文献[25-26],各组件故障状态为1的故障率如表10所示,并假设过滤器和推力器组件故障状态为0.5与故障状态为1的故障率相同。 表10 组件故障率 表11 各根节点模糊概率 根据表11、(4)式和(7)式,计算出叶节点T处于不同故障状态灰色模糊概率(见表12)。用文献[4]方法来验证灰色模糊BN方法计算叶节点T处于不同故障状态灰色模糊概率的有效性,结果如表12所示。 表12 叶节点T处于不同故障状态的灰色模糊概率 由表12知: 1)灰色模糊BN方法得到的结果包含文献[4]方法计算得出的结果,验证了所提方法的有效性。 2.3.1 灰色模糊状态重要度 图6 节点x1灰色模糊状态重要度随变量r变化的曲线 根节点状态重要度受组件当前故障状态和变量r的综合影响,当各组件当前故障状态和变量r不同时,各根节点状态重要度的取值区间不同,分析得出系统的薄弱环节也不同。可根据实际工程选择合适的变量r,当r为0.125时各根节点状态重要度的取值区间(见表13)。用文献[4]方法来计算根节点的状态重要度,结果如表13所示。 表13 根节点灰色模糊状态重要度 由表13可知: 2)在已知根节点当前故障状态条件下,从节点的状态重要度分析时,对于系统的半故障状态,节点x4为系统最薄弱环节;对于系统故障状态,节点x12为系统最薄弱环节。 2.3.2 灰色模糊关键重要度 由表14可知: 2)当从节点的关键重要度分析时,对于系统半故障状态,节点x3和x7发生可靠性退化的变化率引 表14 根节点灰色模糊关键重要度 起系统可靠性退化的变化率最大;对于系统故障状态,节点x9发生可靠性退化的变化率引起系统可靠性退化的变化率最大。 上述分析过程是在计算机配置为Window7 64位系统,Intel Core i5-4460处理器,3.2 GHz主频,4 GB内存的MATLAB 2012a软件平台上计算所得。借助于软件平台,通过该案例可知本文方法编程思路清晰,逻辑清楚,运算效率高,计算量可控。 本文将模糊数学和灰色系统理论引入BN中,提出一种基于不确定隶属度函数和区间特征量的复杂不确定系统可靠性分析灰色模糊BN方法,能够有效定量分析不确定条件下的复杂系统可靠性和组件重要度。得出以下主要结论: 1)所提方法给出了传统BN不能反映组件故障状态和故障率、不能有效描述组件和系统间不确定故障逻辑关系等不确定性问题的有效解决方法。 2)所提方法在不需要精确值条件下,能有效表征和量化由于系统结构复杂、实验样本有限、可靠性数据不足等因素导致的不确定性对系统可靠性的影响。 3)用所提方法分析卫星推进系统的可靠性,求解出在已知各根节点当前故障状态和故障率条件下的系统可靠度;利用BN的双向推理机制分析了组件的重要度,所求出的系统可靠度及组件重要度等可靠性特征量均以区间值形式表示,能为复杂不确定系统的可靠性分析、故障诊断和维修决策提供重要参考依据。
1.2 灰色模糊BN方法详细步骤














2 卫星推进系统可靠性分析
2.1 系统建模




2.2 系统叶节点可靠性分析








2.3 根节点重要度分析


3 结论
猜你喜欢
舰船科学技术(2022年10期)2022-06-17
能源工程(2022年2期)2022-05-23
太阳能(2022年1期)2022-03-05
商用汽车(2021年4期)2021-10-13
无线互联科技(2020年10期)2020-08-14
小学生学习指导(低年级)(2020年3期)2020-06-02
Coco薇(2017年2期)2017-04-25
Coco薇(2017年2期)2017-04-25
电子技术与软件工程(2016年24期)2017-02-23
科技与创新(2016年20期)2016-11-25