
水电枢纽水下摄像数据的畸变机理及标定研究
2020-01-14 03:37:34李永龙王皓冉齐宪荣
自动化与仪表 2019年12期
李永龙 ,张 华 ,王皓冉 ,齐宪荣 ,汪 双
(1.西南科技大学 信息工程学院,绵阳 621000;2.清华四川能源互联网研究院,成都 610000;3.清华大学 水沙科学与水利水电工程国家重点实验室,北京 100084;4.嘉陵江亭子口水利水电开发有限公司,广元 628400)
水电枢纽发挥着发电、防洪、灌溉等众多重要功能,是一类重要的基础设施。长期运行或洪水发生后,需要对水电枢纽的建筑物进行周期性和及时的巡检,发现可能的隐患,保障建筑物的安全运行。水电枢纽建筑物巡检的难点在于部分建筑物在水面以下,而水下巡检的设备精度低、作业难度大大[1]。常用的水下检测主要有芯样试验、声纳检测、水下摄像等方法[2-4]。
1 水电枢纽水下摄像检测方法
水下摄像是一种可以对建筑物表面质量直观判断的方法。通过观测,可清晰判断建筑物是否存在缺陷。水下摄像可以选择搭载在潜水员或水下机器人等不同载体上进行水下观测。文献[5]设计了Anchor Driver 5.2检测系统,采用摄像数据进行水下混凝土结构的检查。文献[6-7]结合水面船和水下机器人,设计了一种图像采集水下系统。文献[8]将融合清洗装置和图像采集系统在水下机器人上,进行水电混凝土表面的检测。文献[9]采用自主水下航行器进行水下结构视频检测。在获得水下摄像的基础上,文献[10]提出了一种基于多结构和多尺度单元的水下大坝图像裂缝边缘自适应检测算法。文献[11]利用大坝水下二维图像的强度值生成三维空间曲面。文献[12]提出了一种水下大坝裂缝检测与分类的新方法。文献[13]提出了一种基于局部全局聚类分析的大坝水下裂缝自动检测算法。
然而,以上文献在分析与研究中,均忽视了水下成像的畸变因素。由于水下特殊的使用环境,摄像设备加装防水装置,引起水下相机的成像模型发生了变化,现场采集的图像数据带有很大的畸变。这些畸变对于缺陷的识别与分类,以及水下三维的重建,都带来了不可忽略的偏差。
为了研究畸变带来的偏差,在此分析了水下摄像的畸变机理,以四川某电站消力池水下巡检的实际数据为基础,进行标定和数据矫正的研究,并以巡检图片中骨料的像素值为基准,对比矫正前后的差异,得到了畸变偏差的趋势和影响程度。
2 成像模型及畸变机理分析
水下相机摄像的设备,常用构造如图1所示。通常采用防水外壳将相机进行密封,放入水中后通过电源与传输电缆给相机供电,并把图像信息传输到水面外。
水下相机可使用针孔相机表征相机在空气中的成像过程。采用的摄像机坐标系为O-XYZ,世界坐标系为Ow-XwYwZw,图像平面坐标系为o-xy,像素坐标系为o-uv,坐标系转换关系如图2所示。

图1 水下摄像机结构Fig.1 Structure of underwater camera
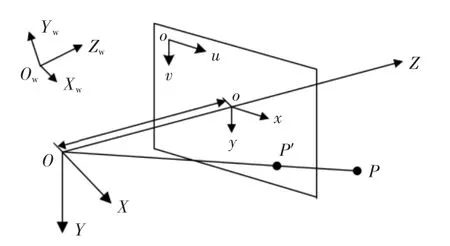
图2 成像坐标系转换Fig.2 Transformation of imaging coordinate system
世界坐标系中的一点P(X,Y,Z)到像素坐标P′(u,v)的转换,就是建立空间三维点到像素二维点之间的联系。满足如下关系:
式中:W为放大系数;P为相机系数;R为外参数旋转矩阵;t为平移矩阵;K为内参数矩阵。P由K,R,t组成。
当水下相机在水下工作时,光线在水下成像的过程会经过水、防水外壳和空气等3种折射率不同的介质而发生折射现象,其折射成像如图3所示。图中,以点P的光路为例进行分析,Pu与Pd分别为光线与防水外壳上、下表面的交点;θa为空气中的出射角;Pc为点P在水下的像点,Pc′为点P在空气中的像点。

图3 水下相机折射成像Fig.3 Refraction imaging of underwater camera
参考文献[14],设定nw为水的折射系数。Pc与Pc′的关系近似满足为

综上,由于水下成像时光线受水下物体折射的影响,水下图像比空中会产生更大的畸变。而水下畸变更多为径向畸变,切向畸变可以忽律。
3 水下巡检数据采集
水下摄像设备选用LBF-C50HD2型水下摄像机(如图4所示)。该摄像机像素(水平像素H×垂直像素 V)为 1920×1080,焦距 2.8 mm,耐压 50 m 水深;水下补光采用5颗LED光源。

图4 水下摄像机Fig.4 Underwater camera
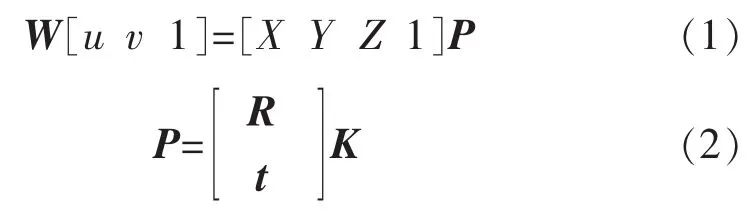
在此以四川某电站为应用试点。该电站坝型为混凝土重力坝,泄洪建筑物为消力池。采用水下摄像设备,对消力池边墙不同区域进行拍摄采集,获得水下混凝土表观的图像数据。对3个测试点A,B,C的数据进行分析,如图5所示。
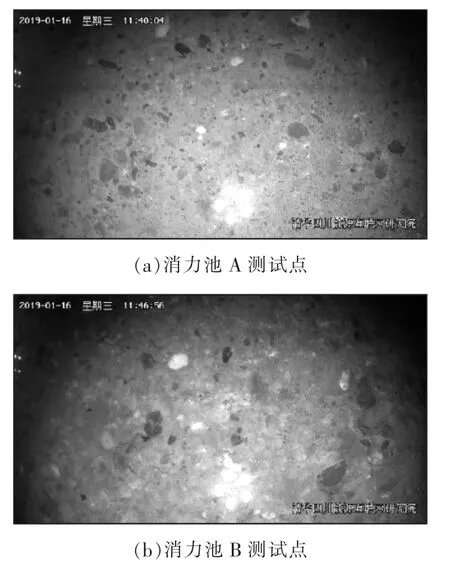
图5 测试点水下混凝土图片Fig.5 Pictures of underwater concrete at test point
4 水下相机标定
采用张正友平面标定的方法[15-16]对水下相机的参数进行标定。径向畸变引入高阶参数项k2与k3来获得更好的畸变补偿效果,即

其中
式中:(ud,vd)为畸变后的像素坐标。
使用5 mm间距的棋盘标定板放入水中,将水下相机放入水中,进行不同角度的拍摄,获得的水下标定板图像共38张,部分图像如图6所示。
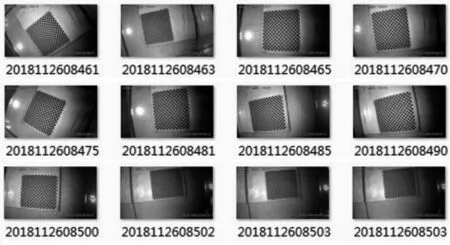
图6 水下标定板的拍摄Fig.6 Underwater calibration plate shooting
使用MatLab的Camera Calibration Toolbox导入标定板水下图像,软件分析出棋盘的黑白方框的角点,如图7所示。
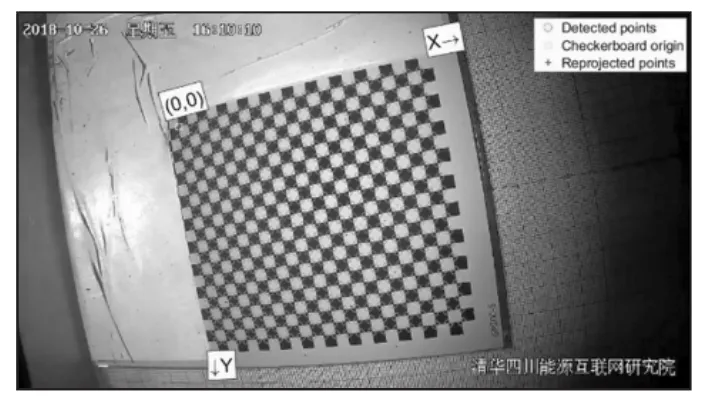
图7 MatLab水下相机标定板分析Fig.7 Analysis of calibration plate of underwater camera based on MatLab
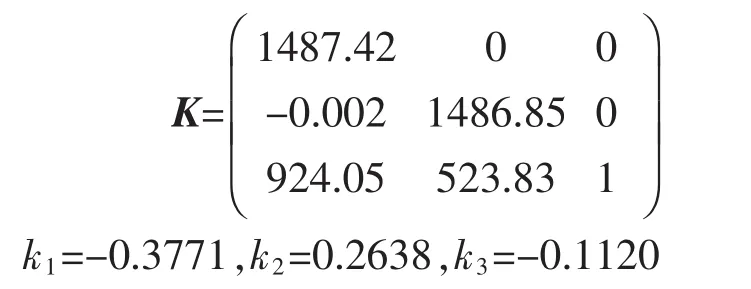
使用软件相机标定后,得到的相机内参数矩阵K和径向畸变参数为
使用计算出的每张图片外参数旋转矩阵R和平移矩阵t,可以计算出相机拍摄的位置。假设棋盘标定板为固定,拍摄位置如图8所示。
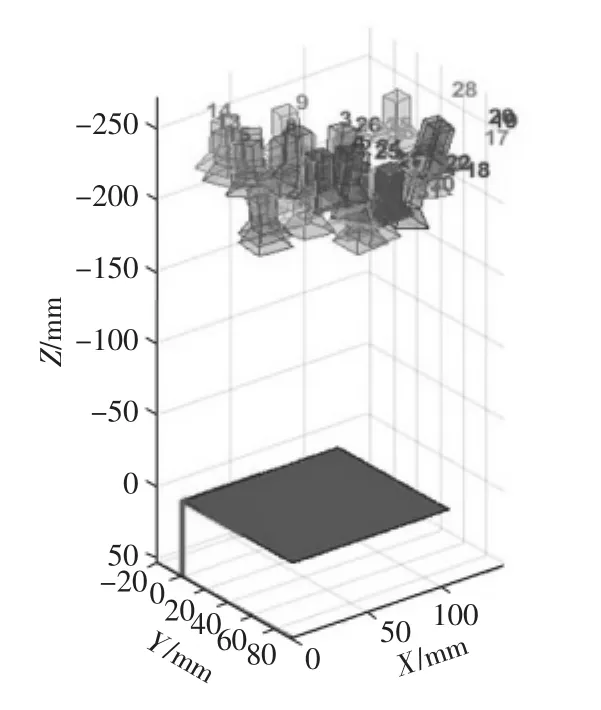
图8 拍摄位置计算Fig.8 Shooting position calculation
计算38张图片的重投影误差 (如图9所示),其中,最大误差为1.32像素,平均重投影误差为0.32像素。
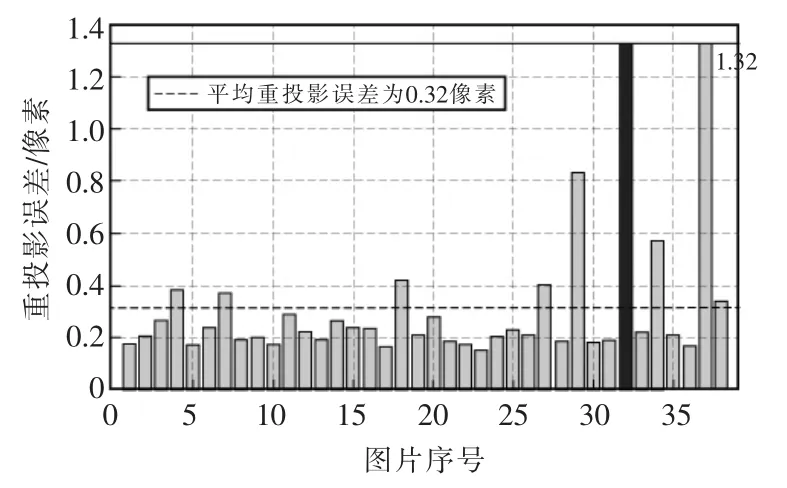
图9 重投影误差Fig.9 Reprojection errors
5 检测数据畸变矫正
使用标定后的相机参数,可以对A,B,C 3个测试点水下拍摄的图片进行校正。为方便分析校正前后的数据,每张测试图片选取7个露骨料的区域。A,B,C 测试点的露骨料区域分别为 A1—A7,B1—B7,C1—C7。矫正后测试点图像如图10所示,其中标注为浅色的区域为露骨料区域。
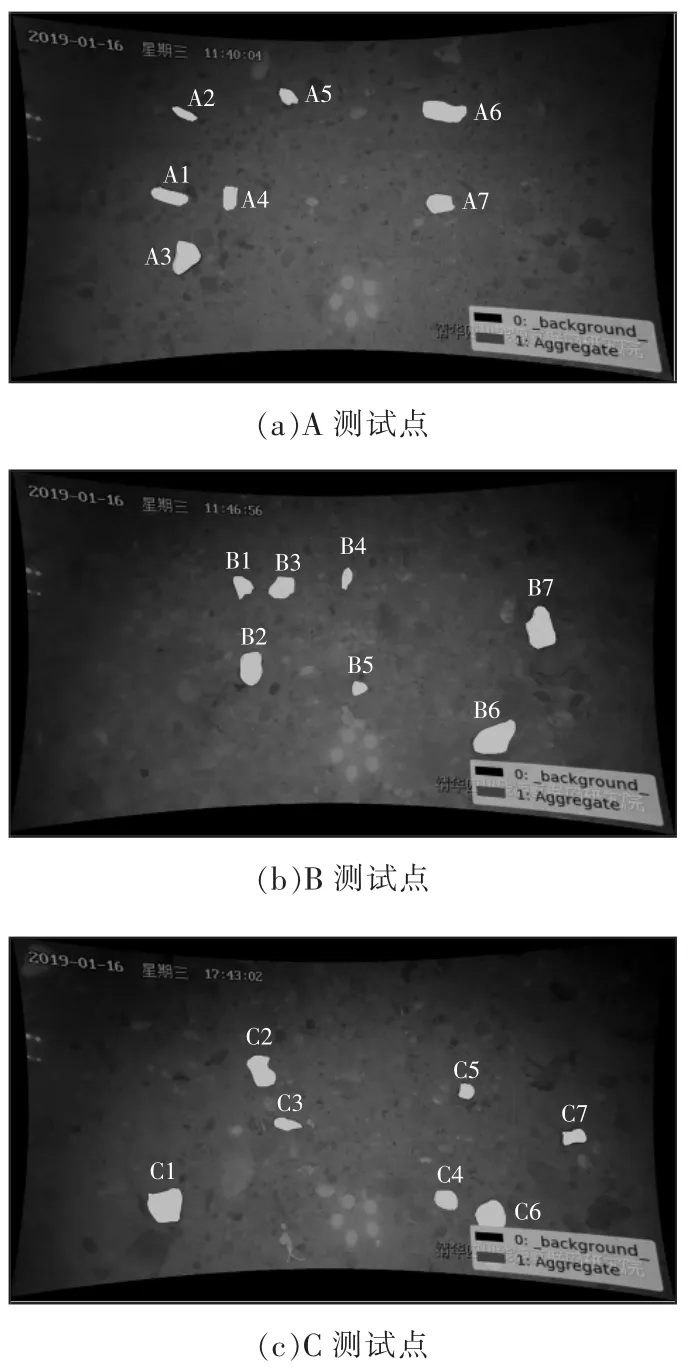
图10 矫正后测试点图像Fig.10 Undistort image of test point
分别统计 A1—A7,B1—B7,C1—C7露骨料区域畸变矫正前和矫正后的像素值Pbc,Pac,并计算矫正前后的偏差值 d,其中 d=(Pbc-Pac)/Pac。 统计结果见表1。
通过矫正前后的比较,相机中心位置畸变较小;离相机中心位置越远,畸变偏差越大。
通过深入研究得出结论:①张正友平面标定的方法和MatLab工具箱对参数标定后,图像平均重投影误差为0.32像素,验证该标定方法是有效和可行的;②通过骨料的图像像素值的偏差分布,可知水下畸变更多为径向畸变,离相机中心位置越近,像素偏差越小,离相机中心位置越远,像素偏差越大;③像素值最大偏差超过30%,证实水下畸变是水下混凝土结构表面缺陷定量分析中不可忽略的因素。
6 结语
通过分析水电枢纽水下摄像数据获取过程中成像原理和畸变特性,并使用水下相机对四川某电站进行消力池边墙的数据采集,获得了典型数据,取得了研究结论。在此研究基础上,可以进一步求解图像像素值与物理尺寸的对应关系,通过水下摄像的数据获得水下缺陷的实际尺寸,进行更加定量化的分析。
猜你喜欢
机电信息(2023年24期)2023-12-26 10:55:38
军民两用技术与产品(2022年1期)2022-06-01 06:28:50
汽车维修与保养(2020年11期)2020-06-09 05:42:16
上海大学学报(自然科学版)(2020年4期)2020-05-24 07:29:38
摄影之友(影像视觉)(2017年10期)2017-11-07 02:37:15
中国惯性技术学报(2017年1期)2017-06-09 08:15:14
光学精密工程(2016年3期)2016-11-07 09:03:34
西安建筑科技大学学报(自然科学版)(2014年6期)2014-11-10 02:35:38
癌变·畸变·突变(2014年2期)2014-03-01 04:39:41
癌变·畸变·突变(2014年6期)2014-02-27 06:15:03
