
基于虚拟仿真的UAV地面站操作舒适性评价研究
2020-01-13 07:48何法江
智能计算机与应用 2020年1期
张 丽, 何法江
(上海工程技术大学, 上海 201620)
0 引 言
无人机(Unmanned Aerial Vehicle, UAV)因其众多优点,如体积小、使用便捷、环境适应能力强等,目前在各个国家中都成为了一大热点。近年来,科学技术不断发展,关于无人机自主控制的研究技术越来越成熟,然而,在实际任务执行过程中,很多时候都需要地面站的飞行员根据实际战况及时发出控制指令,飞行员仍然拥有飞机控制的最终决定权。因此,在无人机地面站的设计中,必须进行操作舒适性评价,然而采用真人真机进行实验不仅成本高、风险大,而且耗时耗力,为此目前广泛采用的是计算机虚拟仿真技术,利用数字化的人体模型和无人机地面站的三维模型,来进行操作舒适性分析。
在虚拟建模技术的工程应用研究方面,Sanjog等人[1]对虚拟人体建模技术在航空领域的应用与发展进行了综述,形成了关于数字人体建模在航空和航天工业应用中的综合知识体系。Abbasov等人[2]研究了Be-200飞机驾驶舱的虚拟建模与飞行员执行任务时的操作舒适性问题,通过Spline Extrude,Polygon Extrude方法进行建模,建立了各种飞机机舱布局的真实场景。Karmakar等人[3]针对喷气式飞机的飞行员,对其工作状态下的视域进行了分析。杜娟[4]以参数化方法建立了人体模型骨骼体系,实现了三维人体模型动态显示。在驾驶舱优化方面,钮松[5]利用遗传算法对驾驶舱布局进行了优化,基于匹配度原理,通过计算机仿真建立了驾驶舱布局模型。Liu等人[6]在确定目标函数时,采用了最小欧氏距离的计算方法,通过PSO算法来对飞机驾驶舱的布局设计进行了优化。
本文利用CATIA虚拟建模仿真技术,构建了符合中国飞行员人体尺寸的数字化人体模型,建立了人体运动学连杆模型,通过Matlab拟合了人体操作舒适性范围,结合RULA评价方法,对某型号无人机地面站进行操作舒适性分析。
1 数字化人体模型的建立
数字化人体模型是指在计算机中构建的可视化虚拟人体,在形态和动态上极具人类特征,可以在虚拟环境中根据不同指令完成各式各样的任务。
CAITA的Safe Work模块中,与人体模型建立相关的是人体模型构造模块HBR(Human Builder)和人体模型尺寸编辑模块HME(Human Measurements Editor )。其中,HBR模块主要用于建立一个可以进行互动仿真分析的数字化人体模型,这是基于一种最佳人体模型分类系统的,可以非常精确地模拟人体的静态和动态特征,用于精准的仿真分析,评估人与产品的舒适性。HME模块可以个性化地修改人体参数,创建自定义的数字化人体模型。本文采用的仿真软件为CATIA V5-6R2014,在CATIA V5中,提供了103个可供修改的人体参数或操作临界参数,诸如身高、上肢长、下肢长、坐高等参数,另外还可以定义平均值和标准差,通过使用多分布的方法,确保建立的人体模型在更大程度上接近实际人体。
要建立本文所需的符合中国飞行员人体尺寸参数的虚拟人模型,需要在HB模块中建立一个基础的人体模型。在数字化人体模型建立的初始阶段,需要从系统预设的人体模型库中选择一个人体模型范本,用于后期的尺寸编辑等个性化定制操作。人体尺寸参数在不同国家、不同地区的人群之间存在很大的差异。CATIA V5预设的人体模型库中只有美国、加拿大、法国、日本、韩国这五个代表性的国家,却没有中国的人体模型,因此在初始建模时,只能初步选择和中国人体尺寸最为接近的韩国人的人体模型。本文在设计时需要分别选取第5百分位、第50百分位和95百分位的人体尺寸,从而满足大部分人的要求。研究选取的是第50%的韩国人的人体模型基准如图1所示。

(a)类别选择界面1
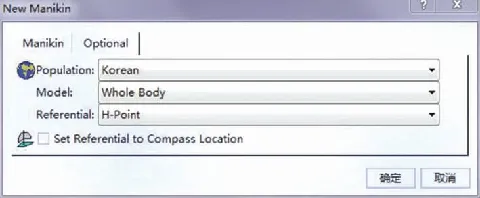
(b)类别选择界面2
当人体模型基准选择完毕以后,初始的人体模型就建立了,如图2所示。然而,如果直接使用韩国人的数字化人体模型进行仿真,会降低实验的可信度,因此需要根据调查数据,选取中国飞行员实际的人体测量参数[7],将建立的人体模型修改为中国飞行员的数字模型。

图2 初步建立的人体模型
通过Human Measurements Editor模块将各项人体尺寸按照标准中的参数进行修改,得到符合中国飞行员人体尺寸的数字化人体模型。CATIA V5可以根据虚拟人的立姿和坐姿两种状态对不同的尺寸项目进行修改,这是因为有些尺寸参数只有在特定的姿态下进行测量才更加准确,减少测量误差,如立姿状态下可以修改身高、上肢长度、下肢长度等参数,坐姿状态下可以修改坐姿眼高、坐深、坐宽等参数。研究给出的在立姿状态下可修改的参数,如图3所示。

图3 虚拟人立姿状态可修改的参数
通过以上步骤分别建立得到相应的第5%、50%和95%的中国飞行员人体模型,用于后续的仿真分析。
2 操作舒适性仿真分析
通过飞行员的虚拟人体模型,对无人机地面站进行操作舒适性仿真分析,当飞行员在正常工作状态时,分析该姿态下的人体舒适性。 对此可得研究阐释如下。
2.1 操作舒适性范围求解
根据美军对于驾驶舱的相关研究,在坐姿工作状态下,手部操作的舒适范围如图4所示。

图4 MIL-STD中的操作舒适性范围
由图4可以看出,MIL-STD中,以坐位点SRP为参考点,则手部操作的最佳舒适性范围是距离坐位点水平距离500~640 mm、垂直距离260~360 mm范围内,由于图4中并未标明眼位点的坐标位置,因此根据图像位置进行估测,得到手部操作的舒适性范围大约为距离眼位点水平距离260~400 mm、垂直距离300~400 mm范围内。
然而,该结论是针对美国人的人体尺寸参数研究得出的,不一定适用于中国的飞行员,因此,需要在中国飞行员人体模型的基础上,研究得到符合中国飞行员的手部操作可达性范围以及舒适性范围。
本文在人体多刚体运动学模型的基础上进行简化和改进,提取了手部可达性范围研究所涉及到的相关人体部位,建立了人体运动学连杆模型。人体运动学连杆模型在工作状态下的示意图如图5所示。
图5中,S1表示眼位点,S2表示枕突点,S3表示颈关节点,S4表示肩关节点,S5表示肘关节点,S6表示手部参考点,l1表示颈部关节点到眼睛的垂直距离,l2表示颈部关节点到坐位点的距离,l3表示肩关节点到坐位点的距离,l4表示上臂长度,l5表示前臂和手的长度,αub表示上臂与躯干的夹角,αqb表示前臂弯曲角度,θ'表示躯干轴线和垂直方向的夹角,等于座椅靠背倾角。

图5 人体运动学连杆模型
手部参考点S6(S6x,S6y)的坐标可用下式计算,即:
(1)
其中,θ'的范围为12°~37°,计算时选取θ'=15°;αub的舒适性范围为0°~5°,αqb的舒适性范围为60°~100°,经过实验证明,当αqb<70°时,操纵杆的所在手托装置将会和腿部发生干涉,为了给手托装置预留安装空间,αqb的最小值定为70°,公式涉及到的飞行员人体尺寸参数见表1。
表1 手部操作舒适性范围涉及的人体参数
Tab. 1 Human parameters involved in the range of hand operation comfortmm

测量项目百分位数55095j177189201l1133137141l2645679715l3570608645l4293315342l5385419451
分别取αub为0°和5°,取αqb在70°~100°之间步长变化为0.1,即可求出操作舒适性范围,经Matlab计算可得拟合结果如图6所示。

图6 中国飞行员操作舒适性范围
图6中,带圆圈的线围成的面积表示第5%的飞行员手部操作的舒适性范围,同理带三角形和星号的线所围的面积分别表示第50%和第95%的飞行员手部操作舒适性范围。以某型号的无人机地面站为例,经分析验证,该地面站的主要操纵设备基本位于图6中的手部操作舒适性范围内,因此初步认为该地面站的设计合理。
2.2 RULA评价分析
为了更加可靠、准确地验证操控台布局的合理性,本文还将采用RULA评价法进一步地对操作舒适性进行验证分析。
RULA是一种简便的工作姿态分析方法,通过建立人体模型,以人体姿势为主要依据,同时考虑动作状态和肌肉力的使用,以评分的形式来判断操作过程中是否有姿势不符合人体正常姿势习惯或可能产生损伤的情况,被广泛应用于训练工效评估。
RULA评价法在评分过程中,首先将身体分为上肢和躯干两大部分,分别对这两部分进行测评,先测量每个部分中各关节的评分,然后根据各关节对应的不同得分,分别得出上肢和躯干两部分的评分,随后再将两部分结合,得出RULA总评分,最后根据RULA总得分来确定该动作的舒适度等级。RULA评分的判断标准如图7~图9所示。其中,各颜色所代表的分值见表2。

表2 评分标准

图7 上臂姿势评分标准范围

图8 前臂姿势评分标准范围

图9 躯干姿势评分标准范围
根据RULA的总分,对于人体姿态的评分共分为4个等级,详见表3。
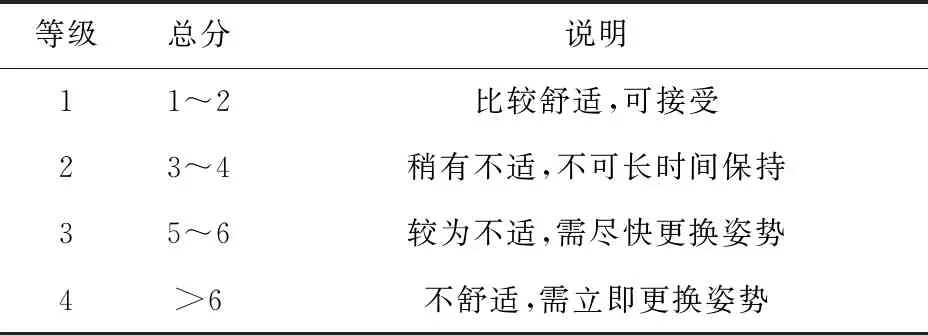
表3 RULA舒适性等级
通过CATIA对某型号无人机地面站进行RULA评估,结果如图10所示。除前臂和手腕部分得分为2,其余部分得分均为1分,属于RULA舒适性等级中的1级,说明飞行员处于该工作姿态下是比较舒适的,因此证明了该无人机地面站的设计合理,飞行员的操作舒适性良好。

图10 RULA姿态评估得分
3 结束语
本文以中国飞行员的人体尺寸数据为基础,在CATIA平台中建立了中国飞行员数字化的人体模型和人体运动学连杆模型,并通过Matlab仿真拟合出了中国飞行员的操作舒适性范围,用该范围对某型号无人机地面站操作舒适性验证,结果表明该地面站的主要操纵装置基本位于操作舒适性范围;同时,利用RULA分析工具,进一步对该地面站的操作舒适性进行了评价分析,得分均≤2,说明飞行员的工作姿态是比较舒适的,进一步证明了该地面站操作舒适性良好。
猜你喜欢
实用手外科杂志(2022年2期)2022-08-31
实用手外科杂志(2022年2期)2022-08-31
实用手外科杂志(2022年2期)2022-08-31
福建轻纺(2022年4期)2022-06-01
中国典型病例大全(2022年9期)2022-04-19
载人航天(2021年5期)2021-11-20
现代仪器与医疗(2021年2期)2021-07-21
汽车之友(2016年15期)2016-08-23
第二课堂(课外活动版)(2015年6期)2015-10-21
销售与市场·管理版(2015年5期)2015-05-05
