
舰艇垂向波浪补偿装置的压力传感测量技术
2020-01-13 08:18张贵荣梁国杰
智能计算机与应用 2020年1期
张贵荣, 梁国杰
(中国人民解放军92601部队, 广东 湛江 524009)
0 引 言
舰艇垂向波浪补偿装置是通过压力实现舰艇垂向波浪的稳定性控制,结合反馈补偿控制的方法,实现舰艇垂向波浪抑制,提高舰艇垂向的稳定性[1]。在进行舰艇垂向波浪补偿装置的质量维护过程中,需要对舰艇垂向波浪补偿装置的压力进行精确计量和测量,构建舰艇垂向波浪补偿装置的压力测量模型,通过压力传感器装置,进行舰艇垂向波浪补偿装置的压力数据采集,结合信息融合和特征分析技术,实现舰艇垂向波浪补偿装置的压力传感测量,提高舰艇的稳定性,相关的舰艇垂向波浪补偿装置压力传感测量方法研究受到人们的极大关注。
对舰艇垂向波浪补偿装置的压力传感测量是建立在对压力传感数据采集和信息融合基础上,结合传输延时分配方法和统计分析方法,进行传感信息跟踪融合和特征匹配,实现压力的精确计量[2-3],但传统方法进行舰艇垂向波浪补偿装置的压力传感测量中存在误差扰动较大和特征分辨能力不好的问题。对此,本文提出基于分布式阵列传感量化融合跟踪检测的舰艇垂向波浪补偿装置压力测量技术。采用压力传感器进行舰艇垂向波浪补偿装置的压力数据采集,对采集的舰艇垂向波浪补偿装置压力数据进行融合处理,结合谱分析方法,进行压力传感测量,并实现对压力传感测量系统的硬件设计,最后进行仿真测试分析,展示了本文方法在提高压力传感测量能力方面的优越性能。
1 压力数据采集和融合处理
1.1 波浪补偿装置的压力数据采集
为了实现对舰艇垂向波浪补偿装置的压力传感测量,首先构建舰艇垂向波浪补偿装置的压力数据采集模型,采用压力传感器进行原始压力数据采集,考虑由N个压力传感器节点组成的压力测量阵列,采用分布式阵列组网设计的方法[4],进行补偿装置的压力测量,得到测量方程描述为:
x(k+1)=A(k)x(k)+Γ(k)w(k),
(1)
zi(k)=Hi(k)x(k)+ui(k),i=1,2,…,N,
(2)
其中,x(k)∈Rn×1为压力状态;A(k)∈Rn×n为状态转移矩阵;w(k)表示压力传感器的阵列能量分布向量,表示为均值为零且方差为Q(k)的干扰分量;Γ(k)为压力传感信号中心频率;zi(k)∈Rp×1为第i个传感器的进行舰艇垂向波浪补偿装置压力信息采集的测量值;Hi(k)∈Rp×n为相应的测量矩阵;压力信息测量的干扰信息分量ui(k)∈Rp×1是均值为零且方差为Di(k)的高斯白噪声。
通过优化阵元分布进行压力传感器部署,得到传感器监测的基元向量w(k)与测量数据ui(k)之间的关联性特征分布,压力信息测量的最优传感节点部署模型为:
(3)
压力信息测量的传感器阵元初始状态x(0)均值为x0,方差为P0,且独立于w(k)和ui(k),i=1,2,…,N。基于分布式阵列传感量化融合跟踪的方法进行压力数据采集,得到统计特征量:
(4)
其中,舰艇垂向波浪补偿装置的输出量化噪声qi(k)的方差满足:
(5)
其中,Δi(k,r)表示k时刻第i个测量节点检测到的舰艇垂向波浪补偿装置压力信息,对第r个分量压力信号进行分段滤波,固定量化步长,r=1,2,…,p。得到舰艇垂向波浪补偿装置的传感压力信息采样输出为:
(6)
根据对舰艇垂向波浪补偿装置的压力传感原始数据采集结果,结合数据聚类和信息融合的方法,进行压力测量。
1.2 压力数据的融合处理
在上述采用压力传感器进行舰艇垂向波浪补偿装置的压力数据采集的基础上,对采集的舰艇垂向波浪补偿装置压力数据进行融合处理[5],在固定阵元个数、平均阵元间距的条件下,得到压力测量的扩维测量方程可表示为:
M(k)=H(k)x(k)+V(k),
(7)
E[V(k)VT(k)]=
(8)
压力数据序列的栅瓣与信号带宽之间的关联特征量w(k)与V(k)的相关性为:
E[w(k)VT(k)]=
(9)
由于RV(k)是一正定的实对称阵,采用自适应波束形成方法,进行脉冲宽度估计和谱特征提取[6],并将RV(k)唯一地分解为:
RV(k)=L(k)R(k)LT(k),
(10)
其中,R(k)=diag{r1(k),r2(k)…,rNq(k)}为线性调频对角阵;L(k)为单位下三角阵,采用模糊聚类方法进行压力数据的融合处理,在融合中心,得到舰艇垂向波浪补偿装置压力扩维测量方程可以转化为:

(11)
其中,
(12)
结合高阶谱特征提取方法[7],得到舰艇垂向波浪补偿的压力补偿输出为:
(13)

(14)
结合上述算法设计,实现对压力传感数据融合处理,根据数据融合结果进行量化跟踪识别,提高压力测量的准确性。
2 压力传感测量算法优化
在上述进行了数据采集的基础上,进行压力传感测量优化,本文提出基于分布式阵列传感量化融合跟踪检测的舰艇垂向波浪补偿装置压力测量技术,提取压力数据的能量谱特征量,采用高阶谱的谱峰识别技术实现舰艇垂向波浪补偿装置的压力传感测量[8],测量方程为:

(15)
其中,

(16)
(17)

(18)
以阵列能量为约束对象,得到c(k)=tr[N(k)]/tr[C(k)],当输出的状态特征量满足:
(19)
得到压力传感测量的适应度函数为:
(20)

(21)
Y(k|k-1)={I-F(k-1) [F(k-1)+
(22)
(23)
(24)
(25)
其中:
(26)
(27)

3 系统硬件设计与实现
在上述进行了舰艇垂向波浪补偿装置的压力传感测量算法设计的基础上,进行系统的硬件设计,在集成DSP环境下进行压力传感测量系统的嵌入式设计,压力测量系统主要由AD信息采集模块、舰艇垂向波浪补偿控制模块、总线传输模块、上位机通信模块、压力信息处理模块和人机交互模块等构成[10],系统的总体设计构架如图1所示。

图1 压力测量系统的总体设计构架
Fig. 1 The overall design architecture of the pressure measurement system
在DSP高速信号处理芯片中,进行舰艇垂向波浪补偿装置压力测量系统的硬件开发,采用32位嵌入式设计方法进行舰艇垂向波浪补偿装置压力测量系统的输出信息采样,采用ADI公司的ADSP21160处理器系统作为嵌入式处理器,使用ADI公司的EE-NOTE68设计舰艇垂向波浪补偿装置压力测量系统的上位机,得到系统的硬件设计如图2所示。

图2 系统硬件设计电路图
4 实验测试分析
为了测试本文方法在实现舰艇垂向波浪补偿装置的压力测量中的性能,进行实验分析,设定压力测量的多通道数据记录动态范围:-10 dB~+20 dB,舰艇垂向波浪补偿装置的压力信息采样率:≥200 KHz,舰艇垂向波浪补偿装置的控制指令脉冲宽度为2 s,压力传感信号的调制幅度在4 V以内,得到舰艇垂向波浪补偿装置的压力测量输出如图3所示。

图3 舰艇垂向波浪补偿装置的压力测量输出
Fig. 3 Pressure measurement output of ship vertical wave compensation device
分析图3得知,采用本文方法能有效实现对舰艇垂向波浪补偿装置的压力传感测量,测量输出的谱峰较高,说明抗干扰性较好。测试不同方法进行压力测量的准确性,得到对比结果如图4所示,分析图4得知,本文方法进行舰艇垂向波浪补偿装置压力测量的精度较高,误差较小。
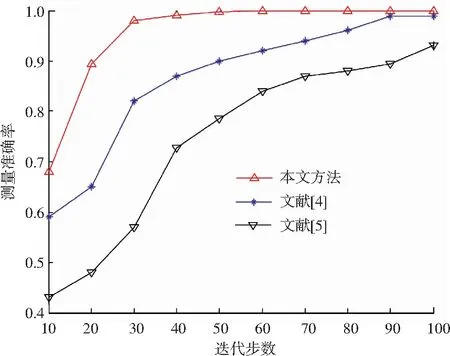
图4 测量准确性对比
5 结束语
构建舰艇垂向波浪补偿装置的压力测量模型,通过压力传感器装置,进行舰艇垂向波浪补偿装置的压力数据采集,本文提出基于分布式阵列传感量化融合跟踪检测的舰艇垂向波浪补偿装置压力测量技术。采用压力传感器进行舰艇垂向波浪补偿装置的压力数据采集,对采集的舰艇垂向波浪补偿装置压力数据进行融合处理,采用高阶谱的谱峰识别技术实现舰艇垂向波浪补偿装置的压力传感测量。采用ADI公司的ADSP21160处理器系统作为嵌入式处理器,进行压力传感测量系统的硬件设计。分析得知,本文方法能有效实现对舰艇垂向波浪补偿装置的压力传感测量,测量精度较高,误差较小。
猜你喜欢
传感技术学报(2022年7期)2022-10-19
今日农业(2022年15期)2022-09-20
学苑创造·A版(2022年4期)2022-06-18
凤凰动漫(军事大王)(2022年3期)2022-06-17
军事文摘(2021年21期)2021-11-14
阅读与作文(小学高年级版)(2020年3期)2020-03-02
当代陕西(2020年24期)2020-02-01
分析化学(2017年12期)2017-12-25
分析化学(2017年12期)2017-12-25
兵器知识(2017年10期)2017-10-19
