
船体运动对浮动核电站堆内燃料组件结构安全的影响
2020-01-10 01:29张乃樑
兵器装备工程学报 2019年12期
陈 强,郭 健,张乃樑,郭 翔
(武汉第二船舶设计研究所, 武汉 430064)
燃料组件是浮动核电站反应堆内的核心部件[1],船体在海洋环境下的随机运动响应会对燃料组件的结构安全产生较大的影响,尤其是当需要在海上进行燃料组件的装卸作业时。目前,我国尚未有浮动核电站以及其他搭载有核反应堆的海洋浮式结构物,因此针对浮动核电站燃料组件的结构安全分析仍需要借鉴陆上反应堆的研究成果。
许多学者针对陆上反应堆燃料组件的结构力学性能进行了研究:陈杰等[2]采用计算流体力学方法,系统研究了燃料组件格架几何建模和网格划分对其搅混性能的影响;杜修力等[3]基于试验测定的燃料组件非线性动力特性,提出了考虑摩擦、滑移和碰撞因素的燃料组件地震反应分析方法;谢永诚等[4]在多年反应分析和试验研究的基础上,对燃料组件在地震和失水工况下的结构动力反应进行了详细而又系统的分析与评定;王万惠等[5]采用流固耦合问题中的附加质量计算方法,研究了浸没在液态钠中的快堆燃料组件在地震作用下发生振动时的结构损坏或变形;鲁剑超等[6]采用计算流体力学方法,针对绕肋结构和组件围筒结构进行多方案论证,分析结果表明,对燃料组件围筒设置塞条结构,可大幅减小组件截面温差,进一步对组件围筒采用倒圆角结构,可使组件截面温差满足设计要求。
海洋核动力平台作为我国首座海上浮动核电站示范工程,需要保证在船体运动状态下反应堆内燃料组件的结构安全,同时为缩短换料周期和保持能源持续供给,需要对平台执行海上换料作业的可行性进行论证。因此,首先对在换料工况下的平台进行水动力学分析,确定船体重心的六自由度运动,然后将船体运动传递到反应堆,对在堆内作业和海上换料两种状态下燃料组件的结构应力进行计算,研究结构应力随船体运动幅值和周期的变化趋势及敏感性,从而实现对燃料组件在船体运动状态下的结构安全分析。
1 船体水动力学分析
平台由软刚臂单点系泊系统长期定位于渤海海域,综合考虑海洋环境条件对船体的激励载荷,以及由软刚臂配重提供的系泊回复力,其时域运动方程为[7]:
Fw(t)+Fwd(t)+Fc(t)+Fm(t)
(1)
经过初步论证,平台在不超过四级海况的环境条件下可以进行海上换料作业,对应有义波高2.5 m,谱峰周期8.8 s,峰值增长因子1.0,表面流速0.58 m/s,定常风速17.1 m/s。因此,以四级海况作为海上换料工况用于平台的水动力学分析,从而确定船体运动幅值和周期的大小。同时根据平台作业海域环境监测结果[8],选取5种常见风浪流方向组合作为分析工况,如表1所示。
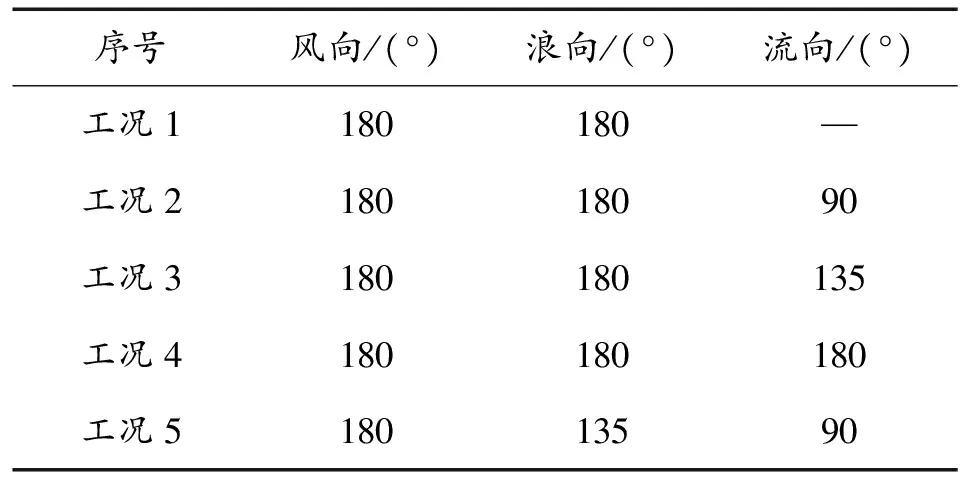
表1 风浪流方向组合
采用水动力学软件AQWA对平台进行频域和时域运动响应分析,船体网格划分如图1所示,共计 23 339个节点,7 658个单元,软刚臂单点系泊系统模型如图2,采用tube单元,系泊腿两端节点与系泊支架、软刚臂之间能自由转动,软刚臂末端与塔架相连且可以自由转动[9]。
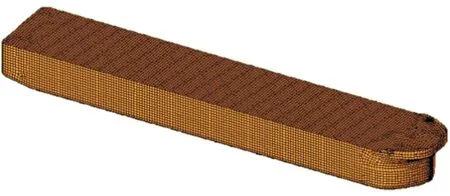
图1 船体网格模型
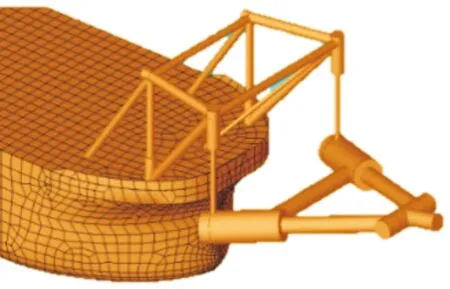
图2 软刚臂单点系泊系统模型
首先采用LINE模块对裸船体进行频域分析,得到船体重心运动幅值响应、附加质量和辐射阻尼等,然后在频域结果基础上,采用DRIFT模块对平台整体进行时域分析,计算在不同工况下船体重心的六自由度运动响应时历曲线,进而得到船体运动的统计值,如表2所示,其中/两侧分别表示运动的幅值和平均周期。
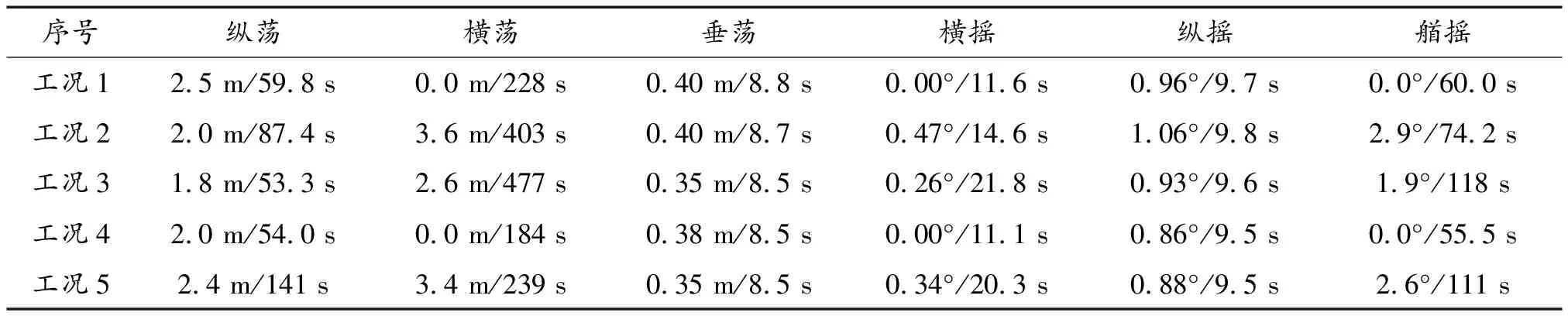
表2 船体六自由度运动统计值
2 燃料组件模型力学等效
燃料组件模型由3部分组成:顶端结构、中间结构和底端结构,如图3所示。考虑到燃料组件内部构成十分复杂,为便于建模和计算,分别对3部分结构进行力学等效。
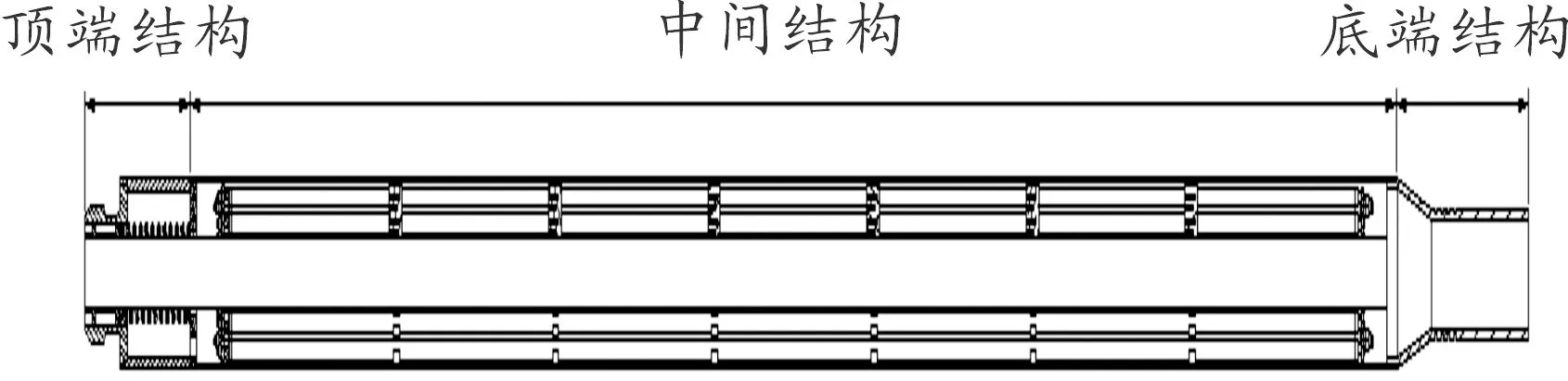
图3 燃料组件模型示意图
顶端结构最大外径74 mm,总长度140 mm,总质量1.27 kg,如图4(a)所示,由编号大小依次为上接头、上套筒、控制棒导向管、定位压紧弹簧和凸肩,其中上接头和上套筒采用相同材质304L不锈钢。保证顶端结构总质量不变,以及上接头和上套筒的尺寸不变,通过增大上接头和上套筒的密度,将凸肩、定位压紧弹簧和控制棒导向管的质量进行等效。等效后的模型如图4(b)所示,密度为8 737 kg/m3,杨氏模量为2×1011Pa。
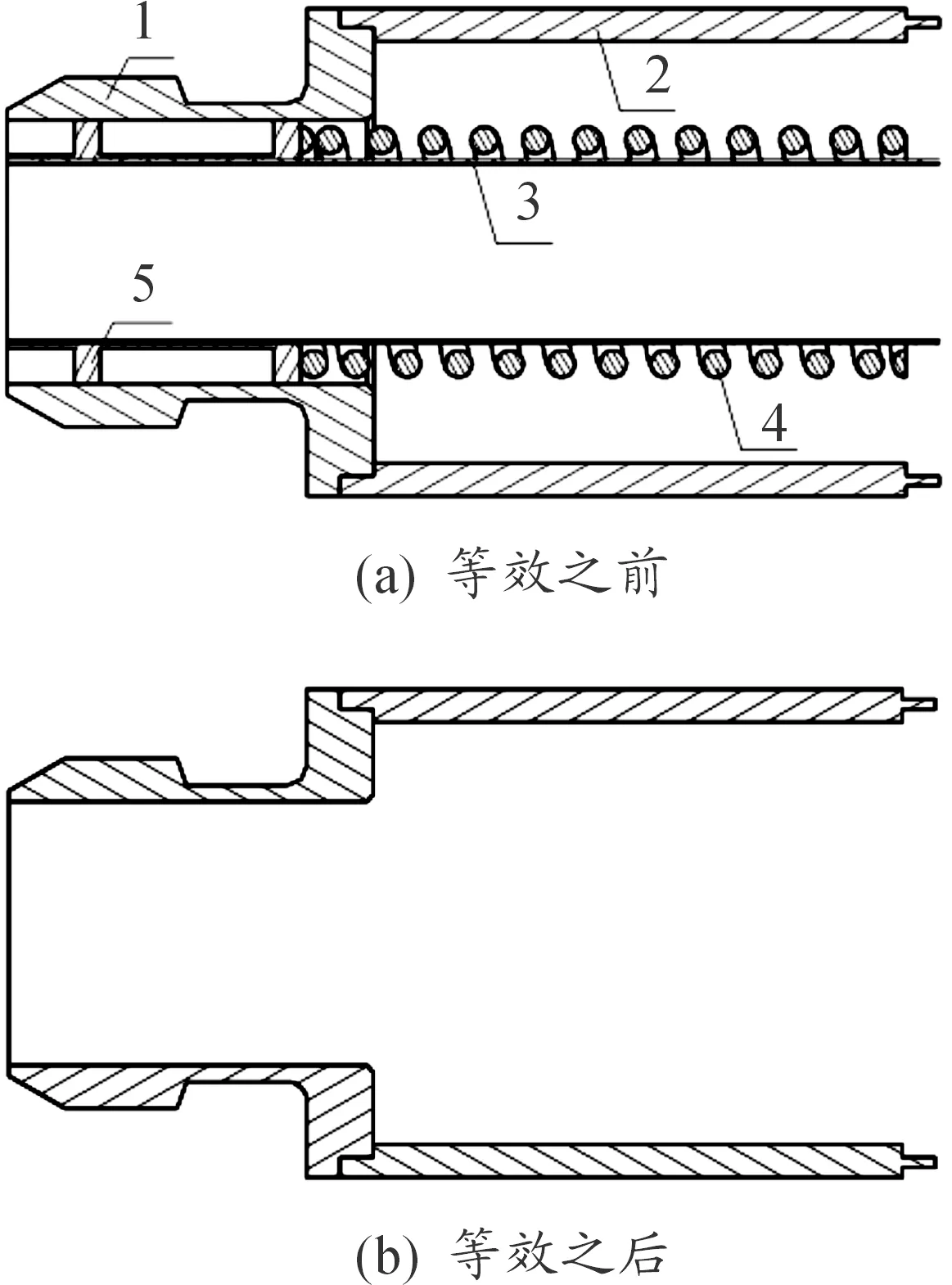
图4 顶端结构模型示意图
中间结构外径73.6 mm,总长度1 546 mm,总质量22.97 kg,如图5,由编号大小依次为分流板、定位板、元件盒、燃料棒(Ⅰ型)、燃料棒(Ⅱ型)、定位螺母Ⅰ型、锆钉、定位螺母Ⅱ型-2、定位格架和定位螺母Ⅱ型-1。
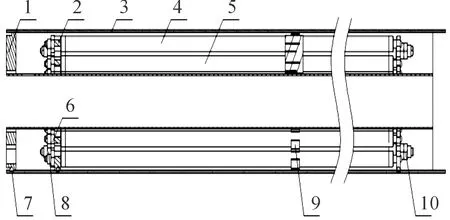
图5 中间结构模型示意图
中间结构的横截面如图6所示,最外层为元件盒,最内层为控制棒导向管,燃料棒在两者中间均布布置。元件盒、燃料棒的包壳管、控制棒导向管的材质均为Zr-4,横截面如图7所示,关于各自中心轴的截面惯性矩由式(2)计算得到。
(2)
式中:DZr-4和dZr-4分别表示元件盒、燃料棒的包壳管、控制棒导向管的外径和内径。保证中间结构的总质量、横截面惯性矩和外径不变,增大元件盒的壁厚和密度用于等效其他部件的重量和横截面惯性矩,等效后的模型为外径73.6 mm,内径66.1 mm的圆筒结构,密度为18 055 kg/m3,杨氏模量为9×1010Pa。
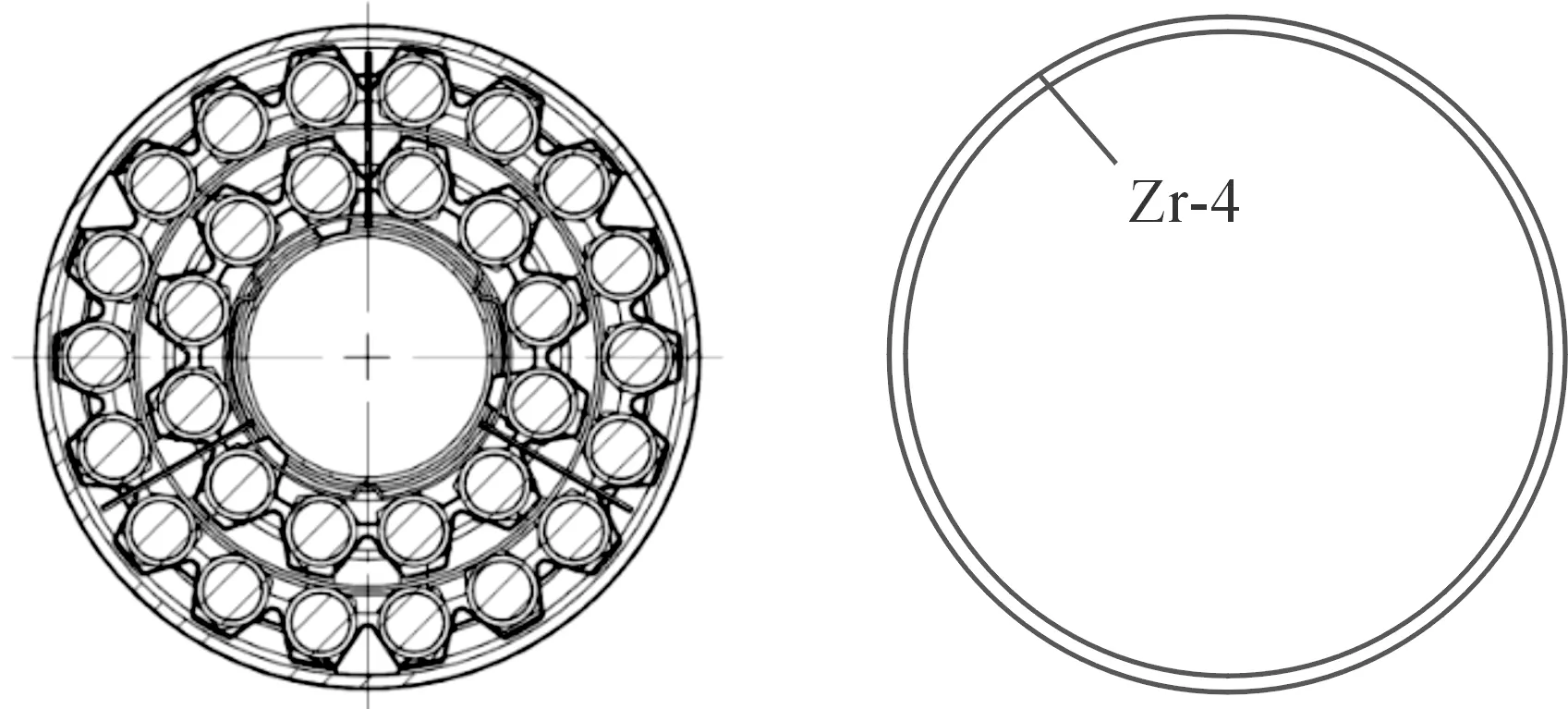
图6 中间结构横截面示意图 图7 燃料棒横截面示意图
底端结构总长度182 mm,总质量1.16 kg,如图8(a)所示,由编号大小依次为下接头和定位钩部件。保证底端结构的总质量和下接头尺寸不变,增大下接头的密度用于等效定位钩部件的重量,等效后的模型如图8(b)所示,密度为11 690 kg/m3,杨氏模量为2×1011Pa。
3 燃料组件结构力学分析
采用结构力学软件Workbench对燃料组件进行结构力学分析,整个分析包括燃料组件在堆内作业和海上换料两种状态。船体六自由度运动中,横摇、纵摇和垂荡为主要的运动形式,同时中间结构作为燃料组件最重要的组成部分,对燃料组件的结构安全至关重要,因此在平台水动力学结果的基础上,分析中间结构的结构应力随船体横摇、纵摇和垂荡运动幅值和周期的变化趋势及敏感性。

图8 底端结构模型示意图
3.1 堆内作业
在反应堆内作业时,多个燃料组件整齐的布置在上、下堆芯栅格板之间,跟随平台一起运动,如图9所示。其中顶端结构的上套筒与上堆芯栅格板、底端结构的下接头与下堆芯栅格板之间相互接触。
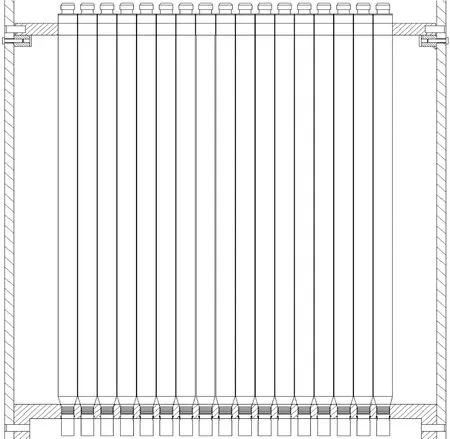
图9 堆内燃料组件布置示意图
采用Static Structural模块对在平台静止状态下的堆内燃料组件进行线性静力学分析。上套筒与上堆芯栅格板之间和下接头与下堆芯栅格板之间均为非线性实体表面接触,因此将接触类型设为非对称摩擦接触,上套筒和下接头外表面设为接触面,上、下堆芯栅格板孔径表面设为目标面。依据《机械设计手册》,金属摩擦系数取为0.1,并采用增广拉格朗日公式进行求解。结果显示,在平台静止状态下,中间结构的最大等效应力为0.32MPa。
采用Transient Structural模块,对在船体运动状态下的堆内燃料组件进行瞬态动力学分析[10]。远程位移可以将船体重心的运动传递到反应堆,从而模拟船体运动状态下的堆内燃料组件。由于平台采用双堆对称布置,相对于船体重心,反应堆中心的位置为(-3.46 m,±5.60 m,-5.45 m)。结果如图10~图12所示,对曲线进行近似线性拟合,得到的斜率如各图中括号内所示。

图10 横摇运动对结构应力的影响曲线

图11 纵摇运动对结构应力的影响曲线
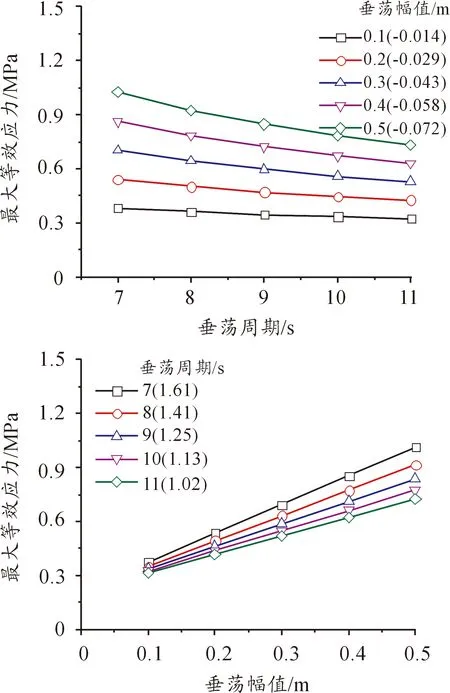
图12 垂荡运动对结构应力的影响曲线
由图10~图12可知:随着横摇、纵摇和垂荡运动周期的增大,结构应力逐渐减小,随着运动幅值的增大,结构应力逐渐增大;运动周期和幅值对结构应力的影响基本呈线性关系,由斜率的绝对值可知,结构应力对运动周期更加敏感,依次为纵摇、垂荡和横摇,对运动幅值相对不敏感。
3.2 海上换料过程
换料作业包含卸料和装料两个流程,二者操作相反,分别对应燃料装卸机对反应堆内燃料组件的上提和下放,速度均为500 mm/min。为了防止燃料组件与堆芯栅格板之间发生刚性接触,从而避免因为燃料组件的载荷过大而发生塑性变形或损坏,因此在燃料装卸机的吊装系统下方安装十字联轴器组件结构。十字联轴器能够自由转动,用于减小燃料组件与堆芯栅格板之间的作用力,从而提高燃料组件的结构安全。十字联轴器组件结构包括万向联轴器和套筒两部分,如图13所示。

图13 十字联轴器组件结构示意图
以燃料组件最下端与上堆芯栅格板上端相平为临界,燃料组件的装卸过程持续时间为211.92 s。因此在Transient Structural模块中,需要创建两个坐标系:一是总体坐标系,坐标原点位于船体重心,用于模拟船体的横摇、纵摇和垂荡运动,并传递给反应堆;二是局部坐标系,坐标原点位于套筒的上表面中心,用于模拟燃料组件相对于反应堆的垂向运动。结果显示,在平台静止状态下进行燃料组件的装卸作业时,最大等效应力为0.31 MPa。
由图14~图16可知:随着横摇、纵摇和垂荡运动周期的增大,结构应力逐渐减小,随着运动幅值的增大,结构应力逐渐增大;运动周期和幅值对应力的影响基本呈线性关系,由斜率的绝对值可知,结构应力对运动周期更加敏感,依次为垂荡、纵摇和横摇,对运动幅值相对不敏感。

图14 横摇运动对结构应力的影响曲线
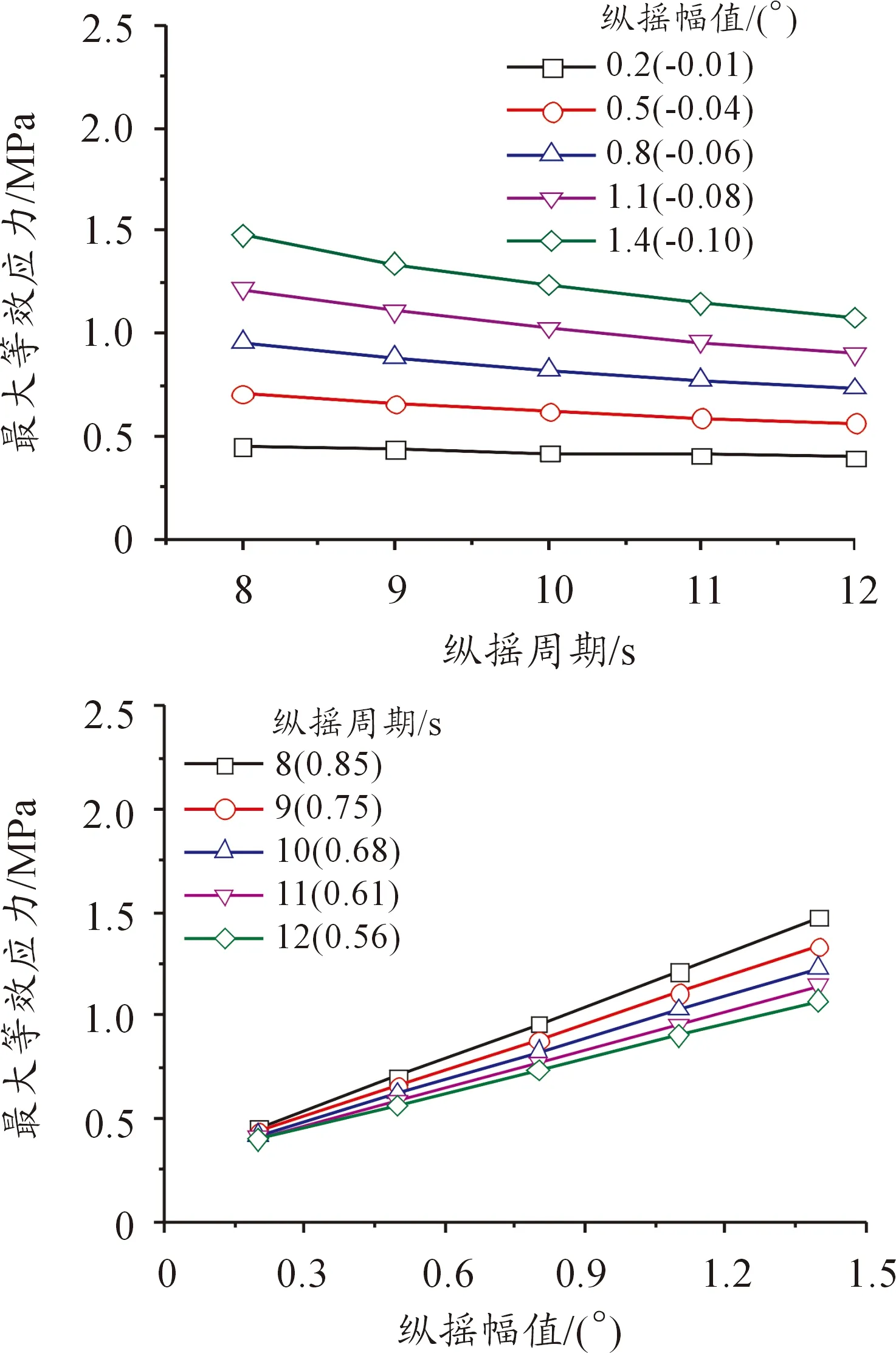
图15 纵摇运动对结构应力的影响曲线
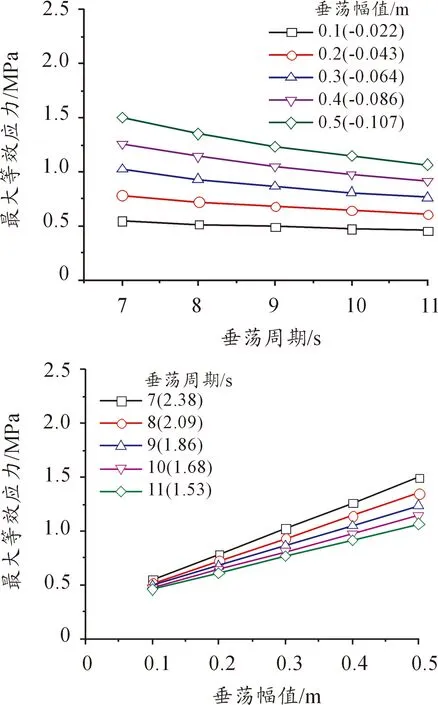
图16 垂荡运动对结构应力的影响曲线
4 结论
在堆内作业状态时,纵摇运动对燃料组件的结构应力影响最大,主要因为反应堆在纵向的摇摆力臂较大,而在海上换料状态时,垂荡运动对结构应力的影响最大,主要因为在燃料组件的装卸过程中垂向存在加速度所致;在两种状态下,与船体运动幅值相比,燃料组件的结构应力对船体运动周期更加敏感,因为堆内燃料组件的运动幅值都相对较小。
猜你喜欢
核安全(2022年3期)2022-06-29
核安全(2022年3期)2022-06-29
重庆理工大学学报(自然科学)(2022年1期)2022-02-18
北京航空航天大学学报(2021年5期)2021-06-09
科技视界(2021年12期)2021-06-04
舰船科学技术(2020年9期)2020-10-31
看世界(2020年2期)2020-03-23
大科技·C版(2018年11期)2018-10-21
能源研究与信息(2016年3期)2017-01-12
