
无人海上航行器磁探搜潜方法研究
2020-01-10 00:59何希盈
兵器装备工程学报 2019年12期
向 前,何希盈
(1.武昌工学院 信息工程学院, 武汉 430065; 2.海军指挥学院作战指挥系, 南京 210016)
包括无人水面艇 (USV) 和无人潜航器(UUV)在内的无人海上航行器(UMV) 具有反应快速、使用方便和成本低廉等优点,是未来海战装备体系中的重要组成部分,已开始应用于扫雷、侦察、情报搜集及海洋探测等任务。在美国国防部2013年发布的第 4 版《无人系统(一体化)路线图》中,“大洋反潜战”分别排在大型和重型 UMV任务需求优先级的第 4、第 6 位,可见美军使用UMV遂行反潜战的意图是明显的[1-2]。基于上述规划,美国防高级研究计划局(DARPA)和美国海军联合推进完成了新型无人反潜验证系统[3]“反潜战持续追踪无人艇”(ACTUV)项目。该项目样艇“SEAHUNTER”长约40 m,排水量约 157 t,最大航速为27 kn,最大巡航力9 000海里/15节,搭载了中频、高频主动声呐和磁探测阵列对目标进行精确定位、跟踪和运动信息搜集,可在5级海况下持续操作,7级海况下保证安全,对敌方潜艇进行30昼夜以上的连续侦察和跟踪,完全具备了现役反潜机、水面战舰和潜艇的广域作战能力[4]。
磁探仪又称磁异常探测器,具有简单可靠、分类能力好、定位精度高、受水文气象环境影响较小等优点,是目前反潜巡逻机的主要反潜探测设备之一。其主要不足在于有效作用距离有限,常用于对目标的近距离精确定位。国外较先进的磁探仪如美国Polatomic 公司的AN/ASQ-233 型激光氦光泵磁探仪和加拿大 CAE 公司的AN/ASQ-508A 磁探仪探测距离均在千米级(静态灵敏度优于0.3 pT·Hz-1/2)[5],仍小于声纳的探测距离,因此磁探仪探潜一般需要长时间的搜索。在海况较高和天气不好,如海况超过 5级时,磁探仪探测距离会出现一定程度下降,虚警率会提高,恶劣的天气条件也会降低飞行器的工作效能,从而进一步降低航空磁探系统的综合效能。此外,反潜巡逻机本身的磁场也可对磁探仪产生较强干扰[6],因此一般需要进行磁补偿飞行获取补偿系数确保磁探仪的正常工作。而采用UMV搭载磁探仪进行探潜,不仅可以低成本长时间自主或遥控航行,避免有人系统在体力、保障方面的限制,增加对潜有效探测距离和横扫宽度,还可通过采用穿浪船型或者水下航行方式,提高高海况下的适航性,减小气象条件的影响,同时还可采用拖曳方式进一步减小自身磁特征对磁探测的干扰,因此可望最大程度发挥磁探仪的有效探测能力,提高搜潜任务的效费比。
目前UMV应用于搜潜仍是较新的研究领域[7],对于其使用模式、搜索效率缺少明确的分析,因此本文建立了一种UMV搭载磁探仪应召搜潜模型,并进行了仿真研究。
1 UMV搭载磁探仪搜索宽度
磁探仪的搜索宽度是体现其搜索能力的重要指标,它不仅与其发现距离有关,而且与磁探仪位置和潜艇深度有关。对磁探仪而言,由UMV搭载增大了其对潜艇的有效探测距离和搜索宽度(如图1所示)。图1中W为磁探仪的搜索宽度;d为磁探仪的作用距离;H为磁探仪距海平面的距离;h为潜艇所在深度。则磁探仪的搜索宽度为
(1)
设任意时刻磁探仪的位置坐标为(x1,y1),潜艇的坐标为(x,y),则当
(2)
时认为搜索到潜艇。
图1 UMV搭载磁探仪搜索宽度
2 目标位置分布模型
由于来自其他信息源的潜艇初始位置数据具有很大的不确定性,根据中心极限定理,可以认为潜艇的初始发现位置服从二维正态分布,散布中心在初始位置点(坐标原点),即数学期望值为0,则潜艇初始位置点(x,y)的联合概率密度函数为:
(3)
其中x,y相互独立且同分布,取σx=σy=σ0,并将直角坐标变换到极坐标,可得潜艇位置散布联合概率密度函数为
(4)
其中:D={(r,θ)|r>0,θ∈[0,2π)},极距r和航向角θ为相互独立随机变量,且极距r服从瑞利分布,航向角θ服从[0,2π)上的均匀分布。
若UMV在应召时间t0后开始搜索,由于潜艇机动速度的不确定性,设潜艇的位置服从N(0,σ1)正态分布,综合考虑初始散布与潜艇机动后,潜艇的位置仍服从正态分布,并进一步可改写为极坐标下的概率密度函数
(5)
由于在极坐标下
r=vt
(6)
其中v为潜艇速度,则v的概率密度函数为(不考虑初始散布)
(7)
σ1=σvt0
(8)
3 螺旋线搜索模型
应召搜潜是指反潜兵力通过其他信息源获得敌潜艇活动情况后,快速抵达可疑目标区域,搜索和攻击敌潜艇的战斗行动。其中,螺旋线搜索是一种重要的应召搜潜方法[8-10](见图2)。螺旋线搜潜时,可获得目标的初始概略位置信息。由于反潜兵力抵达目标现场需要一定的时间,当反潜兵力开始搜索时,目标的机动导致其分布在一定范围内,且该范围还会随着搜潜活动的进行而持续扩大,这也导致以传统有人水面舰为平台的搜潜行动效率低下;而航空反潜兵力虽然效率较高,但受气象条件影响较大,任务成本高,数量有限,难以大规模部署。大型UMV 虽然速度低于反潜机,但其机动性较强、成本低廉、利于批量建造并能够长时间在海上执行任务,借助高性能探测设备和战场网络支持,能够有效提高搜潜效率和部署灵活性。
图2 螺旋线目标搜索
图2中O点为目标被首次发现的坐标点,设搜索者与目标通报发现位置相距为D[11-12]。假定C0是UMV与目标的首次相遇点。设UMV速度为vs,目标速度为
(9)
以点O作为极点,通过搜索者与目标间的射线OK作为极轴建立极坐标系,则UMV航线是等角螺旋线,其方程为:
ρ=R0exp(kθ)=vtt
(10)
式中
(11)
设磁探仪横扫宽度为W,允许目标速度估计值vt在一定的上下限(v1,v2)内,仍能发现目标。
(12)
(13)
由于目标航向θ服从[0,2π)上的均匀分布,故沿螺线搜索φ角度发现目标概率为
(14)
设搜索第i圈的发现概率为Pi,共搜索了m圈,则发现概率为:
(15)
4 理论与仿真分析
仿真条件:① 外部信息引入的目标初始散布均方差为0~3 km;② UMV速度取10 kn到30 kn变化;③ UMV与目标最初发现处距离为6~10 nmile;④ UMV数量为1~4个;⑤ 磁探仪作用距离取800~ 1 500 m;⑥ 搜索时间取3~24 h;⑦ 潜艇航速服从瑞利分布,均值为经航速度,取为5~8 kn;⑧ 潜艇航向服从均匀分布;⑨ 潜深100 m。
4.1 初始散布与发现距离对发现概率的影响
在以上条件下对无人航行器磁探搜潜索发现概率进行仿真计算。设有4条UMV搭载搜索宽度为1 100 m的磁探仪,以航速20节进行12 h的协同探测。表1给出了潜艇航速服从瑞利分布,经航速度为5 kn,初始发现位置10 nmile时,不同初始散布方差下的目标发现概率;表2给出了潜艇经航速度为5 kn,初始散布为1 km时,不同初始目标发现距离下的发现概率。可见目标初始散布误差与初始发现距离对于发现概率均具有较大影响,应设法予以减小。

表1 不同初始散布方差下发现概率

表2 不同发现目标初始距离下的发现概率
4.2 UMV航速与协同探测对发现概率的影响
与搭载声纳探测相比,磁探仪受环境噪声和搭载平台影响相对较小,这一点已在航空反潜机上得到了广泛验证。因此在UMV平台搭载磁探仪进行搜潜时,可以允许UMV以较高的速度巡航,从而提高搜索效率。图3给出了在潜艇航速服从均值为5 kn的瑞利分布,初始散布方差为1 km,初始发现距离为10 nmile时, UMV搭载搜索宽度为1 100 m的磁探仪在不同巡航速度下,搜索时间12 h时的搜索概率。为了提高搜索效率,还可采用多条UMV协同工作[13]。
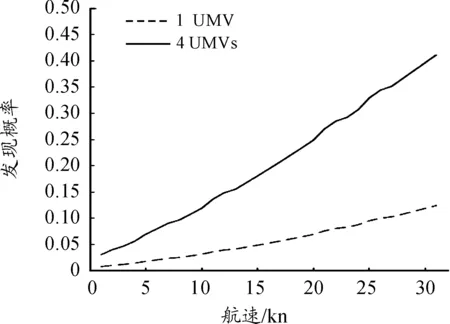
图3 发现概率与航速、UMV数量之间的关系
从图3可以看出多条UMV协同工作的搜索效率远高于单条UMV,且随着巡航速度的提高,对目标的发现概率成加速提高趋势。
作为比较,分别分析了4条UMV搭载搜索宽度为1 100 m的磁探仪协同工作,搜索时长为12 h时的目标发现概率,及快速平台(如反潜机)搭载搜索宽度为900 m的磁探仪,搜索时长为2 h时的目标发现概率,结果如图4所示。可见通过UMV较长的续航力和所搭载磁探仪较大的有效搜索宽度,可以在一定程度上弥补UMV较低的巡航速度所导致对目标发现概率的下降。考虑到UMV更好的任务经济性,说明了UMV搭载磁探仪可以作为一种有效的搜潜装备。

图4 发现概率与UMV数量、速度、搜索时长之间的关系
为了进一步验证计算的正确性,采用蒙特卡洛方法进行目标搜索仿真并与搜索概率模型计算结果比较,结果如图5所示。
从图 5可以看出,在执行应召搜索任务时,搜索概率模型计算结果与仿真结果趋势基本吻合,从而证明了本文模型的正确性。
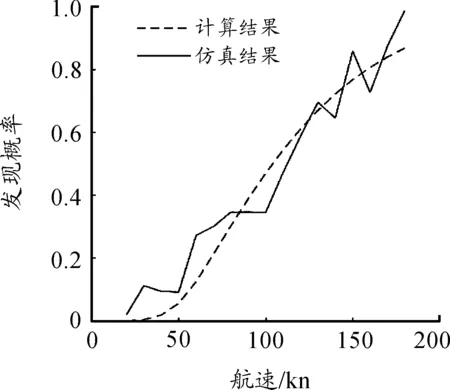
图5 潜艇经航速度5 kn,忽略初始散布,距离发现位置10 nmile,搜索3 h
5 结论
1) 以大续航力UMV作为反潜平台大大减少了搜潜任务受人员、时间、空间、环境和成本的限制,而磁探仪较好的平台适装性和环境适应性减小了对于平台使用的限制,UMV也为磁探仪性能发挥提供了良好的搭载平台,二者的结合优势互补,具备快速形成战斗力和大范围广泛部署的潜力,可以提供有效的反潜密度和强度,为传统的反潜作战模式提供一个更为灵活经济的选项。
2) 目标初始散布范围和初始发现位置距离对搜潜效率影响较大。通过接入战场网络与其他有人/无人平台联合作战,如接收反潜巡逻机、无人机等给出的目标信息,多UMV组成协同探测集群等,可有效减小目标初始散布范围和初始发现位置距离,弥补UMV机动性不足、航空反潜兵力任务成本较高的不利之处,提高UMV搭载磁探仪反潜搜索效率,充分发挥其精确定位的优势。
猜你喜欢
小哥白尼(军事科学)(2022年1期)2022-04-26
小哥白尼(军事科学)(2022年1期)2022-04-26
小哥白尼(军事科学)(2021年6期)2021-11-02
小哥白尼(军事科学)(2021年12期)2021-03-29
小哥白尼(军事科学)(2021年11期)2021-02-28
舰船科学技术(2020年9期)2020-10-31
无人机(2017年10期)2017-07-06
人生十六七(2015年5期)2015-02-28
销售与市场·管理版(2009年21期)2009-09-03
