
基于摄像头在环的HIL仿真测试与研究
2020-01-10 01:16于洪峰王裕鹏曹红艳
汽车电器 2019年12期
于洪峰,王裕鹏,华 典,曹红艳
(潍柴动力股份有限公司,山东 潍坊 261041)
ADAS(Advanced Driver Assistant System,高级驾驶辅助系统)是利用车载传感器,感知周围环境,进行静、动态物体识别、侦测与追踪等技术处理来提高驾驶安全性的技术,传感器主要包括摄像头、雷达、激光和超声波,该系统主要包括导航与实时交通系统TMC、电子警察系统ISA、车联网、自适应巡航ACC、车道偏移报警系统LDWS、车道保持系统LKA、碰撞避免或预碰撞系统FCW、夜视系统、自适应灯光控制、行人保护系统、自动泊车系统AP、交通标志识别TSR、盲点探测BSD、驾驶员疲劳探测、下坡控制系统、电动汽车报警系统等。
硬件在环 (HIL)仿真测试是以实时处理器运行仿真模型来模拟受控对象的运行状态,通过I/O接口与被测的ECU连接,对被测ECU进行全方面的、系统的测试。从安全性、可行性和合理的成本上考虑,HIL仿真测试已经成为ECU开发流程中非常重要的一环,减少了实车路试的次数,缩短开发时间和降低成本的同时提高ECU的软件品质,降低测试过程的风险。
其主要的观念就是利用一个实时运行的仿真平台在其上运行被控对象的仿真物理模型,并利用接口板卡的输入输出能力,对于控制器的输出进行一个控制信号的获取,再将所获取到的信号输入到仿真模型中使其产生相对应的反应行为,再将这样的反应行为转化为传感器所输出的信号中将其输出到控制器的输入管脚,使得整体的系统得到一个闭环的响应。因此由以上的描述可知,在这样的系统中有以下的几点技术指标需要被满足:①高精度的实时仿真物理模型;②高运算效率的处理器板卡;③与控制器管脚可匹配的输入输出介面板卡;④可制造各种测试工况的配套板卡与设备 (如错误注入模块等);⑤诊断与标定工具的接口;⑥可进行信号观测、标定及系统配置的软件;⑦自动化测试的软件;⑧可进行残余总线仿真的接口软硬件能力。
对ADAS系统进行调试,需要各系统之间正常交互、车辆周围的环境可以自由切换模拟,HIL(硬件在环)测试是必需设备,只有HIL可以对整个系统进行联调测试,并模拟各种闭环测试场景。
在HIL测试过程中会对ADAS系统进行调整,根据测试结果优化ADAS系统架构和控制算法,对于提升ADAS开发设计能力十分重要,可以说是项目开展的关键因素。特别是项目在道路试验阶段,现有条件无法开展具有危险性的试验,HIL测试是仅有的可以模拟实车进行路试的方法。
1 ADAS传感器零部件介绍
1.1 ADAS传感器特点
通常的ADAS传感器包括声学类、光学类和电磁类3种,传感器的特征如表1所示。

表1 ADAS传感器的特征
1.2 毫米波雷达
按照毫米波雷达的工作频率可以分为:24GHz毫米波雷达和77GHz毫米波雷达。毫米波雷达按照雷达所能够探测到的距离也可以分为3类:短距离雷达、中距离雷达和远距离雷达。毫米波雷达的主要用途分类如表2所示。

表2 毫米波雷达用途分类
1.3 Camera摄像头
Camera是广义的相机或摄像头传感器,根据类型包括单目、双目、红外、鱼眼等,主要负责对前方车辆和行人等障碍物的图像采集以及对前方信号灯与交通标志标线的信息采集。
视觉传感器系统是无人驾驶智能汽车障碍物的识别以及避障中的重要组成部分,主要由图像的采集模块、处理模块、特征提取模块等组成。
1.4 激光雷达
激光扫描雷达的工作原理是:激光器以逆时针在水平方向上发射的激光束完成190°的平面扫描。当激光束遇到目标障碍物时,反射回来激光束被光学接收系统的探测器检测到,会转变成一个电信号经过滤波和放大之后,输入到内部的数字信号处理器,经过处理后输出到采集程序显示在计算机上。在激光雷达的实际应用中,扫描周期、角度测量范围和角度分辨率以及探测距离等是主要关注的量。
1.5 超声波雷达
超声波雷达是利用传感器内的超声波发生器产生40kHz的超声波,再由接收探头接收经障碍物反射回来的超声波,根据超声波反射接收的时间差计算与障碍物之间的距离。超声波雷达成本较低,但探测距离相对较短,只有几米,通常用于泊车系统中,且超声波雷达会受限天气条件。
2 ADAS HIL测试设备组成
2.1 ADAS HIL整体架构
ADAS设备由HIL机柜、车辆动力学模型、传感器仿真软硬件、场景建模工具等组成。ADAS测试设备构成见表3。ADAS HIL测试主要包括摄像头在环测试方案和雷达在环测试方案。
作为一个使用功能相当复杂的民用建筑,其设计应该充分体现“以人为本”的原则,贯彻“以人为本”的设计理念辅以先进的信息技术手段,从交通组织,功能布局以及就医环境入手,整合各种有利的资源和要素,以创新的设计手法为社会大众提供更舒适、更温馨、更贴心的医疗空间。
2.2 视频暗箱
整个HIL系统由HIL机柜、车载雷达场景生成设备、视频暗箱、机械台架、变频柜 (用于雷达变频)、微波暗室(涂有吸波材料)、上位机电脑等组成。
摄像头在环测试采用视频暗箱,主要由摄像头安装支架、视频显示设备、遮光黑盒、供电系统、线束、内部电源等硬件构成,视频黑箱是HIL设备的组成部分,HIL设备为黑箱提供所需的视频信号,摄像头供电信号,通过总线进行信息交互,如图1所示。

表3 ADAS测试设备构成

图1 摄像头在环测试暗箱
2.3 毫米波雷达模拟器
雷达在环测试的目的是生成真实雷达目标,并让真实的车载雷达探测到,HIL可以1ms的速率更新雷达目标属性,属性包括距离、速度、雷达反射面积、角度等。雷达在环测试可以详细验证雷达部件功能。
功能测试则是测试ADAS功能比如ACC、AEB以及其它功能。Miro-sys的ARSG设备可以仿真前面3个参数 (距离、速度和雷达反射截面积)。角度的仿真是通过机械方式实现的,雷达回波的发射天线是根据仿真目标车辆的移动而精准定位的。雷达模拟器结构如图2所示。
车辆动力学仿真模型由以下部件构成:发动机 (基于查表)、动力传动系统、车辆动力学、环境。
其中:发动机模型包含一个支持ECU介入的基于table的发动机模型。该模型可以方便地被全特征的汽油机或柴油机模型代替。
动力传动模型包括手动和自动变速器,支持前驱、后驱及全驱。驱动轴建模为弹性元件。
车辆多体系统建模为非线性多体系统,包括基于几何结构或者基于table的悬架运动学和基于table的弹性运动学。模型支持车辆的垂向、纵向和横向动力学。
环境模型对道路、驾驶员及驾驶员操作序列进行建模。

图2 雷达模拟器结构图
3 基于Camera摄像头的ADAS算法测试研究
3.1 视频暗箱结构
采用定制的摄像头视频暗箱,如图3所示。
摄像头暗箱构成如下。
Part 1:显示器屏幕,车辆运行周围场景,显示摄像头需要采集的画面。
Part 2:摄像头支架,可以调整摄像头高度及与屏幕距离,保证摄像头采集的画面角度与实际情况一致。
Part 3:Eyewatch,摄像头的监控显示器。
Part 4:摄像头与视频输出,拍摄Eyewatch的显示情况,并把图像传输到ControlDesk的监控界面上。

图3 ADAS摄像头暗箱
3.2 实时仿真模型结构
车辆及道路场景模型ASM_Traffic在基础上进行扩充,增加了Simulator、摄像头模型、Spare和BusSysterms,模型基于Matlab/Simulink 搭建,摄像头模型构架如图4所示。
3.3 HIL测试界面
ADAS-Camera闭环HIL的测试界面主要由场景搭建ModelDesk界面,场景显示MotionDesk界面和主控界面ControlDesk构成。在ModelDesk中建立的Maneuver、Road和Traffic场景会同步到MotionDesk中显示,场景显示界面如图5所示。

图4 摄像头模型架构图
3.4 基于摄像头的硬件在环测试
测试ADAS-Camera闭环的功能,Simulator模拟发动机ECU的CAN通信,与ADAS-Camera组成CAN网络。在ADASCamera闭环测试之前,先对Camera进行功能测试。测试Camera对视景的识别功能,主要测试Camera对前方车辆、路边交通标识、行人和车道线的识别,测试结果如图6~9所示。
ADAS-Camera闭环测试包括:自动跟车测试和前车Cut in/Cut out测试。
4 结论
1)采用视频暗箱的方式能够准确模拟摄像头传感器的感官场景。
2)对于ADAS HIL测试设定合适的测试用例是测试的关键。
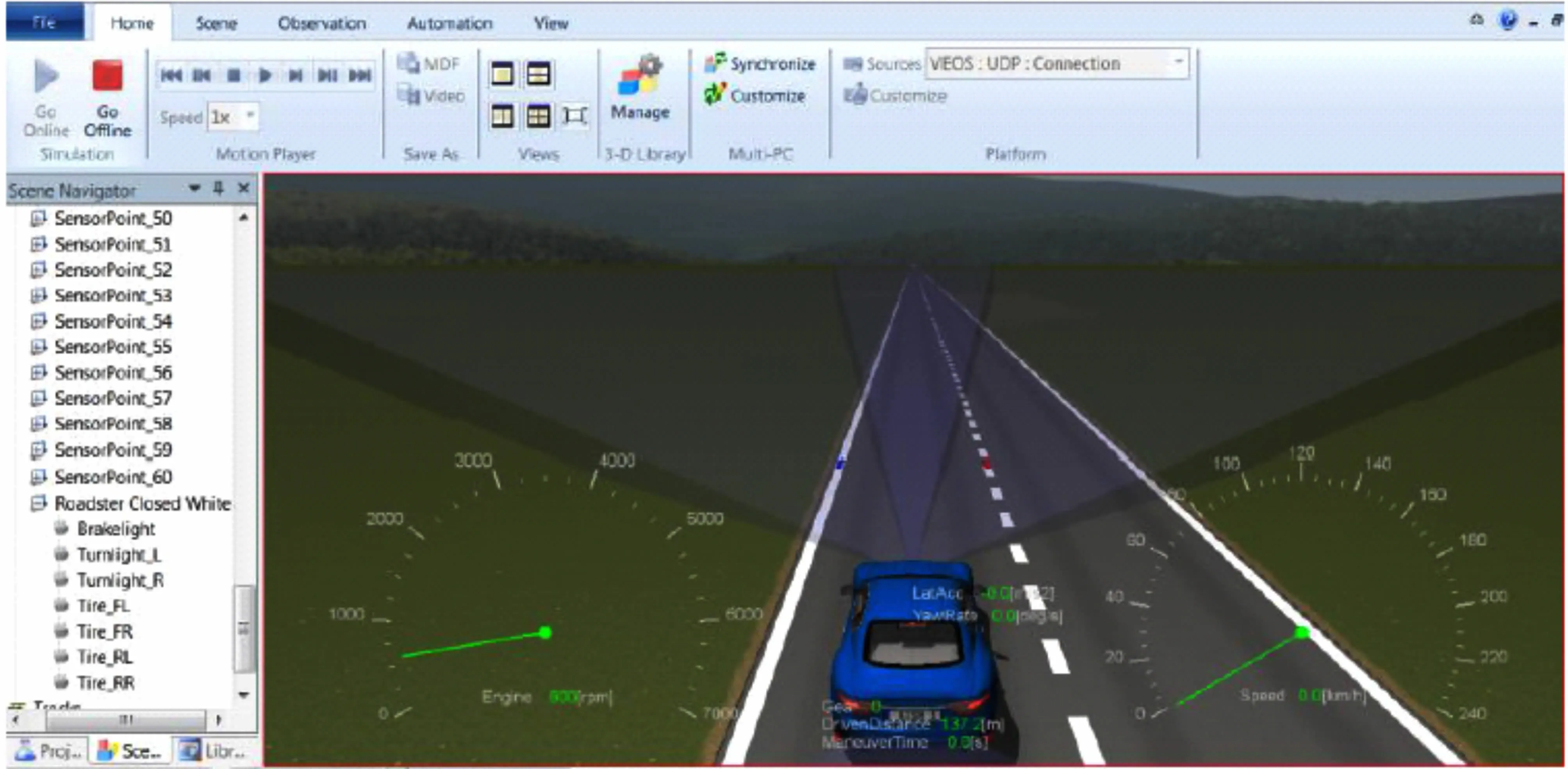
图5 场景显示界面

图6 前方车辆视景和EyeWatch识别前车及距离

图7 交通标识视景和EyeWatch识别交通标识

图8 行人视景和EyeWatch识别行人

图9 车辆偏离车道线和EyeWatch识别车道线
猜你喜欢
中国交通信息化(2022年9期)2022-10-28
中国典型病例大全(2022年7期)2022-04-22
东坡赤壁诗词(2022年2期)2022-04-15
汽车工程师(2021年12期)2022-01-18
建材发展导向(2021年6期)2021-06-09
小天使·六年级语数英综合(2018年10期)2018-10-15
中小企业管理与科技·下旬刊(2018年2期)2018-03-23
东方教育(2016年6期)2017-01-16
军事文摘·科学少年(2016年7期)2016-09-20
师道(2014年3期)2014-04-04
