基于加速度计与气压计信息协同融合的相对高度测量方法
2020-01-09 09:36:04周年荣唐立军徐国垒张远思赵丹
云南电力技术 2019年6期
周年荣,唐立军,徐国垒,2,张远思,3,赵丹
(1.云南电网有限责任公司电力科学研究院,昆明 650011;2.昆明理工大学机电工程学院,昆明 650500;3.昆明理工大学理学院,昆明 650500)
0 前言
随着社会的发展,相对高度在很多工程项目中成为了一个不可缺少的物理参数,如室外高压作业人员爬塔,无人机定高[1]、建筑工地高度测量等。目前相对高度测量方法有传统机械式的直接测量法,红外激光测量,超声波测量,GPS 测量,基于气压传感器电子仪器的间接计算测量。传统的机械测量量程有限,体积大,不易携带,红外激光和超声波的测量精度高,却会受到障碍物的影响,GPS 测量虽然能到达较好的效果,但成本高;相比较而言,利用气压传感器间接测量相对高度更具有发展前景。
目前利用气压传感器间接测量相对高度的方法有三种:一种是基于BP 神经网络算法计算相对高度[2];一种采用标准或改进的气压高度公式计算相对高度[3];另外一种是利用加速度计积分测量相对高与气压计间接测量相对高度互补滤波计算相对高度[4-5]。由于外部环境下气压不断变化,标准公式或改进的气压高度公式不能降低测量误差[6];BP 神经网络需要大量的训练才能运用,但是外部环境随时都在变化,导致该方法运用在外界环境的可靠性不高;由于加速度计的二次积分会导致误差增加,故利用加速度计积分测量相对高与气压计间接测量相对高度互补滤波计算相对高度也不能达到外界环境下所需精度。为了在外部环境下获取更精确的相对高度测量值,本文提出利用加速度计与气压计信息协同融合测量相对高度方法。
经过实验观察,得到气压传感器测量相对高的动态性能良好,但静态过程中受外界因素影响导致信息漂移[7],引起运用过程中出现极大的误差;而加速度传感器能较好的识别作业人员是否处于运动状态;基于两种传感器的特征,本文利用加速度计与气压计信息协同融合测量相对高度。该方法通过加速度计采集的三轴加速度矢量和的值的变化幅度是否大于设置的阈值来判断作业人员所处的相对高度是否发生变化,如果判断相对高度发生变化,气压计采集到的海拔高度变化有效,否则无效。该方法减小气压计间接测量的误差,降低成本,便于携带并且不受障碍物影响,具有广泛的适应性。
1 传感器测量原理
1.1 气压计间接测量相对高度原理
气压传感器用于测量气体的绝对压强的一种仪器,该传感器向上或向下运动时,传感器所处海拔高度值发生变化,采集到的压强值随海拔高度的变化而变化,本文通过压强与海拔高度的转换关系,通过压强值计算出相应的海拔高度值[2],式(1)为转换公式。

式中:H表示海拔高度,单位为m,P为气压传感器采集当前位置的大气压值,P0为标准的大气压值。
为了将其输出的海拔高度值从零开始记录,先对其转换后的海拔高度值进行校正,校正公式如下:


其中式(2)为初始化情况下的静止状态中前N次海拔高度值H的求和公式,N为海拔高度值个数,H_sum为N次海拔高度值的总和;式(3)为N次初始数据求平均值的公式,H_average为平均值;式(4)为校正后的相对高度值公式,其中relative_H为载体相对于初始位置的相对高度值。
1.2 加速度计识别动态特性原理
加速度计传感器是一种能够测量加速度的传感器,该传感器具有较高的灵敏度,能较好的识别传感器的运动特性,本文主要针对于传感器上下运动特征提取。
加速度传感器由于安装角度不一样,传感器采集到的X、Y、Z 三轴加速度值不同,为了解决这一问题,本文采用三轴加速度矢量和的值提取运动特征,三轴合加速度受安装角度影响不大。三轴加速度矢量和的计算如式(5):

式中A_XYZ 表示三轴加速度矢量和的值,A_X表示X轴方向上的加速度值,A_Y表示Y轴方向上的加速度值,A_Z表示Z轴方向上的加速度值;
1.3 气压计与加速度计信息协同融合结构图

图1 气压计与加速度计协同滤波结构图
图1 中,P为气压计采集到的压强值,通过压强值P利用海拔高度换算为海拔高度H,LH为H低通滤波过后的值;A_XYZ为加速度计采集到的三轴加速度矢量和的值,LA为A_XYZ低通滤波之后的值,D_XYZ为LA的斜率计算值;A为判断载体是否处于静止的阈值,且A>0,如果LA>A, 则载体处于上升或下降状态,否则,载体为静止状态。
2 加速度计与气压计协同融合
2.1 数据预处理
传感器采集到的原始数据带有噪声,采用软件低通滤波对三轴加速度矢量和的值与海拔高度值进行数据预处理[8],为了更加明确的区分出载体是否上升,对低通滤波后的三轴加速度矢量和的值进行微分计算,并取微分后的绝对值,计算公式如下,其滤波方程为

式(6)为三轴加速度矢量和数据预处理公式,其中LA(n)与LA(n-1)分别为(n)与(n-1)时刻三轴加速度矢量和数据滤波后输出值,A_XYZ(n)为n 时刻三轴加速度矢量和的原始数据,m1为滤波系数,该系数取值范围为0<m1<1,它可以影响输出值的稳定性和响应速度。
式(7)中D_XYZ(n)为三轴加速度矢量和的斜率值的绝对值,T为采样频率。
式(8)为相对高度数据低通滤波公式,其中LH(n)与LH(n-1)分别为(n)与(n-1)时刻经过低通滤波后的海拔高度值,relative_H(n)为(n)时刻相对初始位置的原始高度值数据,m2为低通滤波系数,该系数取值范围为0<m2<1。
2.2 协同融合参数设置
2.2.1 协同融合理论
本文将加速度计与气压计水平安装在作业人员的头顶,通过加速度计与气压计信息协同融合测量作业人员相对高度。
根据加速度计在静止状态下与运动状态下采集到的三轴加速度矢量和的值的变化幅度不同,设置一个阈值A,当三轴加速度矢量和经处理之后得到D_XYZ的绝对值大于阈值A时,判断作业人员所处的相对高度值发生变化,否则判断作业人员所处相对高度值没有发生变化。由于气压计具有良好的动态性能,因此根据D_XYZ的绝对值判断作业人员所处相对高度发生变化时气压计间接测量得到的相对高度值有效,否则无效。
经过数据预处理之后,得到相对起点的高度值与三轴加速度矢量和的斜率值的绝对值的关系,将它们坐标表示如图2。
从图2 中可以看出,当作业人员向上运动时,相对起始点的高度值呈明显上升状态,三轴加速度矢量和的斜率值的绝对值波动也很大;当作业人员停在某一位置时,相对起始点的高度值变化相对较弱且不稳定,三轴加速度矢量和的斜率值的绝对值波动很小;分析数据变化特征,设置三轴加速度矢量和的斜率值的绝对值D_XYZ的相关阈值,当三轴加速度矢量和的斜率值的绝对值大于这个阈值的时候,气压计间接测量相对高度变化有效,否则判断无效并忽略。
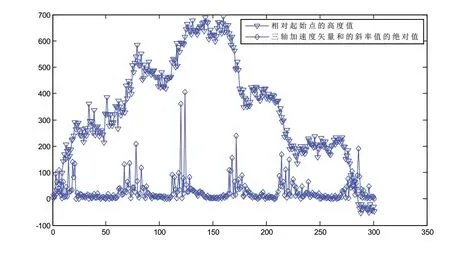
图2 加速度绝对值与相对高度值
2.2.2 阈值设置
当三轴加速度矢量和的斜率值的绝对值的阈值设置过大,会忽略掉其中一些有效信息,设置过小,一些无效信息被误认为有效,为了得到一个合理的阈值,本文通过观察,人为判定作业人员所处相对高度是否发生变化,提取相应的数据段取平均值。
通过在同一高度内进行7 次反复上升下降试验,其中上升过程中在三处不同高度下停止一段时间,得到作业人员所处相对高度发生变化段的数据平均值为52.5,静止段的数据平均值为9.6,设置阈值A范围为9.6<A<52.5;在作业人员所处相对高度发生变化过程中,会出现小于A的值,在停止过程中也会出现大于A的值,接下来分别设置A等于40、35、30、25、20、15、10,计算作业人员所处相对高度发生变化过程中采集数据大于A的次数h_m占该过程中所有采集数据次数sum_h之比,比值为h_ p;停止过程中采集数据小于A的次数l_ m与该过程中采集的总次数sum_l之比,比值为l_ p,且h_p与l_ p分别为两种工作过程中的有效数据占总数据的比值,计算式如(9)、(10):

通过计算得到设置不同阈值后的相应比值,当设置阈值A变小时,作业人员所处相对高度发生变化中三轴加速度矢量和的斜率值的绝对值大于阈值的比例逐渐增大,停止段中三轴加速度矢量和的斜率值的绝对值小于阈值的比例逐渐减小;两种过程中的比值之和先增大后减小,故本文设置阈值为A=15。
2.2.3 相关系数设置
上升或下降过程中,三轴加速度矢量和的斜率值的绝对值大于阈值A=15 的次数占总次数的0.716,即是一部分有效信息被忽略,故有效的相对起始点的高度值需乘以一个相应系数β,β计算公式如下:

2.3 有效相对高度计算
作业人员所处相对高度发生变化过程中三轴加速度矢量和的斜率值的绝对值大于阈值时,有效相对高度计算公式如下:

式(12) 中effective_h(n)与effective_h(n-1)分别为作业人员所处相对高度发生变化过程中n 与n-1 时刻的有效相对高度值,relative_H(n)与relative_H(n-1)分别为作业人员所处相对高度发生变化过程中n 与n-1 时刻相对起始点的高度值;当判断为禁止状态时,有效相对高度值effective_h不变。
3 测试结果与分析
3.1 利用加速度计与气压计信息协同融合测量相对高度实验数据分析
本文选取学校附近某一高压塔的部分安全高度作为测量平台,由于激光测量50 m 以内的测量距离误差与实际的相差1 mm,所以实验以激光传感器测得的621 cm 高度作为参考高度,将加速度计与气压计水平安装在作业人员的头顶,其中对采集到的相对高度值进行低通滤波,得到图3 所示结果,可以看出通过低通滤波后的相对高度值较为平滑。
经过协同滤波后的数据曲线如图4 所示。
图中可以看出当作业人员停止不运动时,经过协同融合后得到的相对高度基本没有波动,在到达最高点的时候,可以看到图中的坐标显示为595.8cm,与激光测到的高度值相差25.2cm,能达到室外环境下测量相对高度的精度要求。

图3 相对起始点的高度值低通滤波
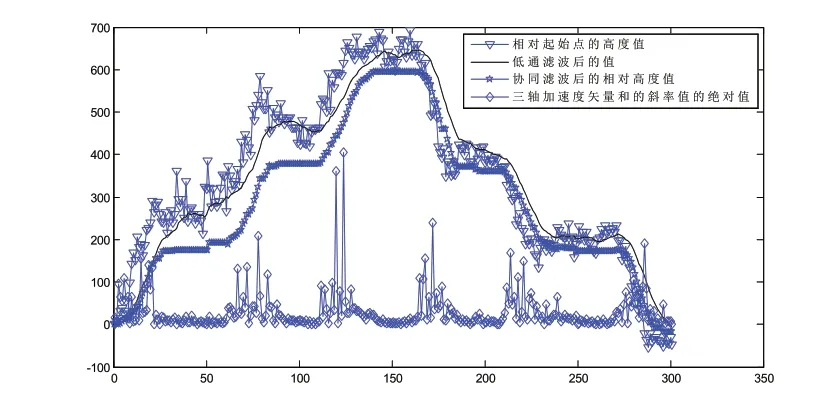
图4 协同滤波后的数据曲线
3.2 加速度计与气压计协同融合测量相对高度优越性及误差分析
目前气压计测量相对高度的运用范围越来越广,但是精度不高,尤其在室外工作,将受到各种各样因素影响,如剧烈的风速,太阳的光照,以及温度等将会使得气压计采集的大气压强发生巨大的变化,从而导致测量的海拔高度发生巨大的误差;本文提出利用加速度计与气压计信息协同融合测量相对高度的方法,大幅度降低剧风、温度、光照等因素所引起的误差,通过本文提出的利用加速度计与气压计信息协同融合测量相对高度方法测得的高度与激光测到的高度相比较,其误差为4.058%。
综上所述,本文提出的利用加速度计与气压计信息协同融合测量相对高度增强了气压计在外界环境中测量相对高度稳定性,减小相对高度测量的误差,拓展了该仪器的使用范围,具有一定的推广价值。
4 结束语
本文研究并实现了利用加速度计与气压计信息协同融合测量相对高度,通过提取作业人员工作过程中加速度计与气压计采集到的数据,通过加速度计与气压计信息协同融合测量作业人员相对初始位置的相对高度;本实验在室外环境下进行,采集作业人员随意上升或下降过程中的数据并进行协同融合,得到的结果与50 m 测距激光相对比,误差在4.058%,达到室外很多工程项目中的需求精度,同时相对于气压式传感器利用GA-BP 神经网络测量相对高度更容易实现,应用范围更广。该方法具有成本低,可靠性高,稳定,适用性强等优点,有着广泛的应用前景。
猜你喜欢
气象水文海洋仪器(2022年2期)2022-07-08 09:48:46
中国特种设备安全(2021年5期)2021-11-06 05:09:08
北京汽车(2021年1期)2021-03-04 13:05:46
自动化与仪表(2019年8期)2019-09-03 07:44:58
电子制作(2019年9期)2019-05-30 09:42:12
思维与智慧·下半月(2017年12期)2017-12-25 16:17:28
中国惯性技术学报(2017年1期)2017-06-09 08:15:14
光学精密工程(2016年5期)2016-11-07 09:06:41
现代检验医学杂志(2015年3期)2015-02-06 01:52:29
导航定位与授时(2014年2期)2014-04-27 13:41:11