适合风电接入的直流输电自抗扰控制策略研究
2020-01-09 09:36:08张铭体
云南电力技术 2019年6期
张铭体
(云南电网有限责任公司大理供电局,云南 大理 671099)
0 前言
风力发电由于技术成熟、成本较低且可大规模开发利用,因此成为可持续发展新能源中发展最快、最具有竞争力的发电技术。随着风力发电技术的不断发展,普遍认为风力发电需具备有功控制和频率调节等辅助服务功能。由于风电出力时会受到风速的随机性和间歇性扰动的影响,使系统有功功率和负载容量不平衡,间接导致系统频率大规模扰动。文献[1-2]中针对不同风力发电机组的频率响应特性进行研究,得出变速恒频型风机无法主动响应系统频率的变化。文献[3-4]提出了利用风力发电机组转子惯性控制、超速控制和变桨控制组合控制并配合储能辅助风电调频策略。文献[5]提出区域控制误差(area control error,ACE)信号经过处理后叠加风力发电机输出的有功功率,利用ACE误差信号参与风电并网频率控制。文献[6]提出了风力发电机组与自动发电控制AGC 机组分布式协同实时控制系统频率的策略,在消纳风电低频分量和平衡系统有功功率中有较好效果。文献[7]提出将风电出力波动部分作为负载处理的策略,能较好地平抑功率和频率的波动。文献[8]中研究了基于高压直流输电频率附加控制策略,结果表明利用高压直流的短时过载能力和快速功率调制能力代替传统的风电调频储能可以明显改善系统频率。文献[9] 提出了基于AFC 的HVDC 配合基于PID 的AGC 辅助风电并网频率控制,并在各种随机扰动情况下取得了较好的效果,分析其仿真波形,得其鲁棒性能如表1 所示。

表1 AFC配合AGC控制的鲁棒性能
本文在文献[9]研究基础上,针对含大规模风电接入的交直流输电系统,对风力发电系统进行分析;基于风力发电的调频技术和自抗扰控制技术优势,提出了HVDC 附加AFC 作为一次调频和基于自抗扰的AGC 作为二次调频配合基于自抗扰控制器的惯性响应控制抑制风电出力大幅度随机扰动引起的频率波动。最后利用MATLAB/SIMULINK 进行仿真,并与无频率附加控制直接并网、文献[9]中AFC 和AGC 控制方式并网和基于经典控制PID 控制技术的控制并网方案进行对比,验证基于自抗扰控制技术并网控制策略的优越性及可行性。
1 风电特性及风力发电系统特性
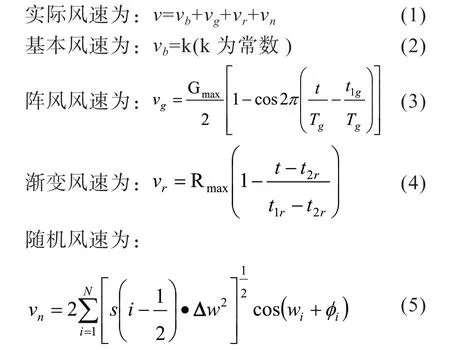
以自然界空气流动产生的动能为能量来源的风力发电系统是通过风轮机的转动将风能转化为机械能,再通过变速装置将转速提高至适合发电机转动的机械能,最后由发电机将机械能转化为电能,再通过电气技术将电能并入电网中。根据空气动力学相关知识可以得知:风是由四个基本量线性叠加而成[10];设实际风速为v,则v由基本风速:vb、阵风风速:vg、渐变风速:vr、和随机风速:vn线性叠加而成;基本风:vb反应了平均风速;阵风vg:反应了风速的突变性;渐变风vr:反应了风速的缓慢变化的特性;随机风vn:反应了风速的随机性。由此建立数学模型如式所示:
风力发电机组输出功率PWTG会随着实际风速的变化而发生改变,其数学表达式如下:

在式中:ρ:空气密度;R:风叶半径;λ:叶尖速比;θ:桨距角;Cp(λ,θ):功率效率;Vw:风速。根据能量守恒定律,在能量转换时会有损失,因此实际利用系数Cp<0.593(称为贝兹极限Betz Limit);查阅相关资料,得到风力发电机实际风能利用系数为:

风力发电机组输出功率,会受到风电场汇集效应和风力发电机叶片惯性作用而受到一定程度抑制[11];但风能的持续性和间歇性波动,导致风力发电机系统输出的有功功率持续扰动,如果不经过任何控制系统对其加以控制就直接并入电网,风力发电输出的有功扰动会造成电力系统有功功率不平衡,进而对系统频率造成损害。
2 自抗扰控制器设计
自抗扰控制器是基于传统控制技术PID 控制器基础以误差来消除误差原理上发展起来用来代替PID 控制器的新型控制器,其保留了PID 控制技术控制精髓和控制优点,并且对PID控制中存在的缺陷进行改进,以适应现代化控制技术中对控制精度、响应速度和抗干扰能力的要求[12]。主要由跟踪微分器、扩张状态观测器、非线性误差反馈控制器和扰动补偿装置四个部分组成[13]。本文根据需要设计一个三阶的自抗扰控制器,基于自抗扰控制技术的分离性原理设计了如图1 的控制结构框图。本文设计的自抗扰控制器由过渡过程(TD)、扩张观测器(ESO)、非线性组合(NLSEF)三个部分构成,其中扰动补偿控制部分隐藏于扩张观测器和非线性组合之间传递函数部分。TD 为输入信号安排过渡过程,以产生设定值的跟踪信号和微分信号;ESO 对受控对象进行实时状态观测,以及时获得系统扰动估计的动态信号;NLSEF 是误差的非线性组合,用来代替PID 控制技术中误差的积分信号。

图1 三阶的自抗扰控制器结构框图
1)根据控制对象的承受能力和系统的控制能力,事先安排合理的过渡过程,解决超调与快速性之间的矛盾,使误差反馈增益和误差微分反馈增益选取范围增大,从而使整定更为容易,控制器的鲁棒性加强[14]:
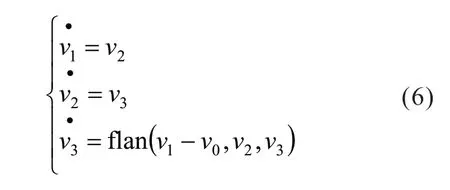
其中v1是安排过渡信号,v2是该安排过渡过程的微分信号,v3是安排过渡过程2 阶微分信号。
2)扩张状态观测器是自抗扰控制器的核心部分,是通过外部变量即控制量和部分状态变量或状态变量的函数的观测来确定系统内部状态变量信息的控制装置[14]。其作用是根据估计出受控对象的各阶状态动态特性和被控对象间的总扰动实时作用量,通过误差补偿装置加以补偿,使系统线性化为积分器串联型结构,简化了控制对象,有利于提高控制器的控制性能。
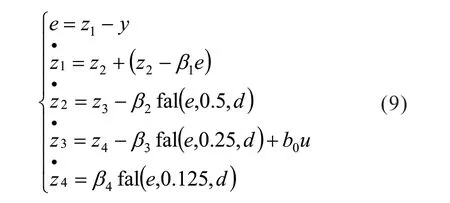
其中z1,z2,z3为跟踪对象状态变量,z4为系统估计出来的扰动。
3)非线性状态误差反馈是给定值过渡过程中产生的跟踪信号与微分信号和被控对象状态变量实时动态特性之间误差(包括线性误差和非线性误差)的非线性控制方法与控制策略[14]。在已有的动态特性中保留对控制器新产生的动态特性有利部分,只消除对新动态特性不利部分,再用状态反馈来补充新的动态特性。

其中u0为提取信号的非线性组合,z4/b0为对扰动的补偿,u为控制器输出的控制信号。
3 附加频率辅助控制策略
3.1 一次调频控制策略
本文中采用HVDC 附加频率控制AFC 作为一次调频控制策略,其原理是直流功率调制。利用高压直流输电的短时过载能力和快速功率调制能力,快速平衡风电出力扰动高频分量[15];用来代替风电并网的调频备用容量[8]。通过调节整流控制器IGBT 的触发角,改变换流站电气设备所消耗的无功功率,解决无功功率调节和交流电压稳定性的问题,间接的使交直流电力系统功率平衡。本文中换流器采用三相全控桥式整流、逆变电路,其控制方式采用整流侧定电流控制,逆变侧定熄弧角控制,其控制原理框图如图2 所示。
针对风电出力受扰动的影响引起交直流电力系统有功不平衡,导致系统频率发生偏移的现象,AFC 控制器根据系统反馈的交直流输电线路各运行状态,快速改变整流侧触发角,通过改变直流输电线路的电流值控制高压直流输电线路有功功率输出,缓解交直流电力系统有功不平衡,实现对高频震荡的频率抑制,使系统频率得到改善[16-17]。AFC 的采用文献[9] 中提出的方案,其结构如图3 所示。
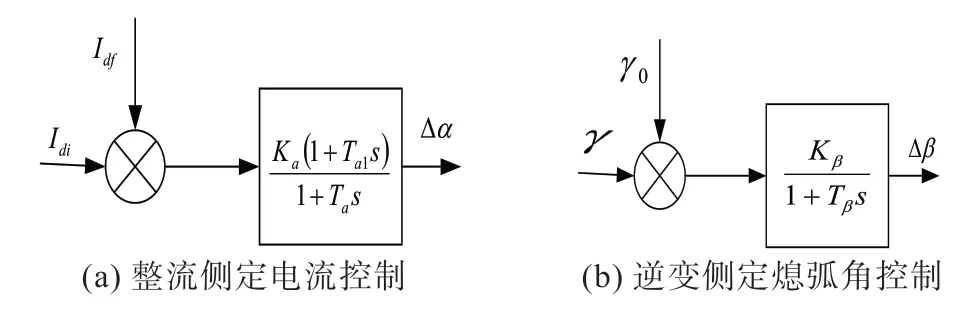
图2 换流器IGBT触发电流控制方式
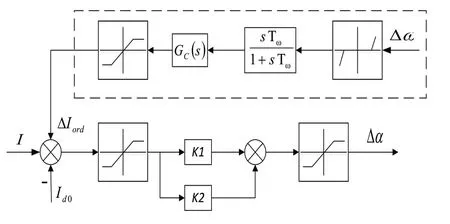
图3 基于AFC的整流控制器辅助控制结构图
基于TLS-ESPRIT 算法[18]和改进射影控制理论[19],控制器传递函数Gc(s)为[9]:

3.2 AFC与AGC配合辅助频率控制策略
自动发电控制是电力系统中发电机组的原动机和发电机间电磁功率平衡的控制技术,从而解决电力系统由扰动引起的系统有功功率不平衡导致系统频率波动的问题。AGC 的控制框图如图4 所示,测量模块把直流联络线和交流联络线上的有功功率偏差信号和交流系统频率偏差信号采集起来传送到ACE 模块;ACE 模块利用 PID 控制器或自抗扰控制器计算出参考负荷设定值,然后通过调速系统控制发电机输出机械功率,进而参与系统频率控制[5-6]。
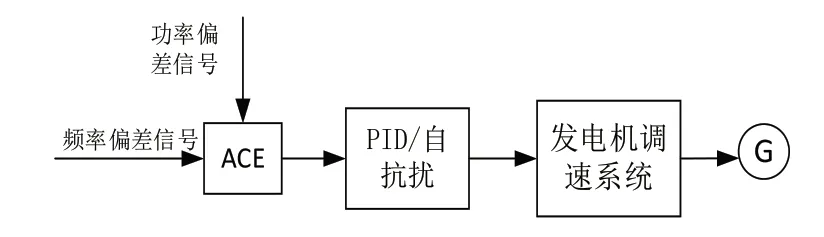
图4 自动发电机组设计原理框图
交流异步发电机调速系统采用调压调速方式,采用PWM 调制信号作为软开关驱动双向晶闸管导通[20]来实现交流调速。由于采用调压调速的调速方法,发电机的调速范围很窄,当转速较低时,发电机的机械特性特别软,很容易受到电网电压、负载等扰动的影响致使发电机受到损坏,因此在控制电路中加入带转速负反馈的闭环控制,如图5 所示。

图5 调频发电机调速控制系统原理图
文献[9]中介绍了AFC 和AGC 配合的方案,其结构如图6 所示。

图6 AGC配合AFC控制原理图
控制策略采用AFC 配合AGC,使区域偏差信号ACE 为0,达到交直流电力系统有功功率平衡,进而使系统频率稳定在系统额定频率范围内[8]。ACE 由交流联络线有功功率偏差和直流联络线有功功率偏差加上用偏差因子加权的频率偏差构成[9],即式

式中β为频率偏差因子。
3.3 风力发电机系统惯性响应辅助频率控制策略
大规模风电接入电力系统时,会导致系统惯性降低[21]。当异步风力发电机风机转子与系统频率解耦时,无法在系统频率变化时主动提供惯性支撑,所以通过调整控制目标和控制策略,使机组主动响应系统频率的变化,具有一定的惯性响应和频率调节能力[22]。转子惯性控制是在风电机组运行过程中,通过改变发电机转子侧换流器的电流,控制转子速度以得到合适的等效惯量,快速响应系统频率的暂态变化[23-24],为电力系统提供惯性支持。在转子惯性控制的方法上,通过增加辅助频率控制环节,以实现风力发电机组惯性响应辅助系统频率控制[25],控制系统结构框图如图7[27]所示。
在控制环的设计上,实时检测系统的频率变化率df/dt 作为惯性响应控制的输入量,经过变频控制系统模块,输出为风力发电机转子转速调节引起的电流变化量。由于转子转速不能长时间维持在速度连续大规模波动状态,随着转子转速的趋于稳定,有可能会造成惯性响应控制系统误动作,引起电力系统频率发生扰动[26],因此在频率变化Δf的跟踪微分权重信号之后加入高通滤波器,作用为避免持久的频率偏差对变频控制系统产生影响;在频率偏差的权重信号后加入低通滤波器,避免在系统正常运行时,系统频率发生微小变化引起转子惯性响应频率辅助控制系统发生误动作[27]。
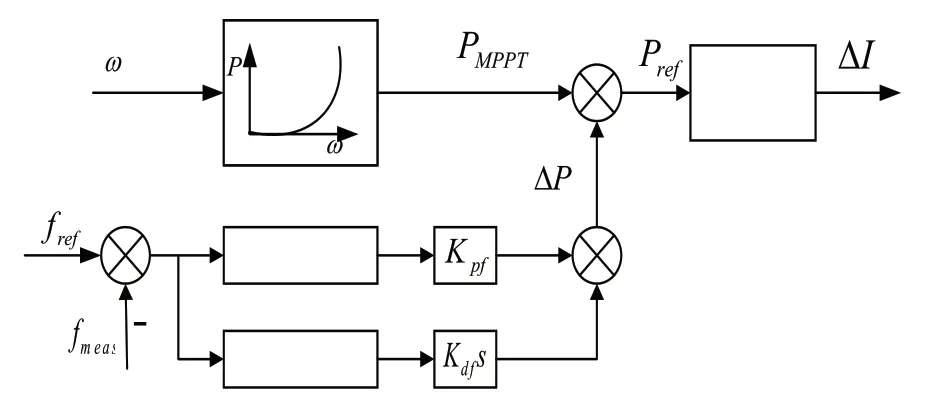
图7 转子惯性响应辅助频率控制原理图

式中:Kdf:频率偏差的微分权重系数;Kpf:频率偏差的权重系数;Δf:系统频率偏差。
4 仿真分析
4.1 仿真模型
在Matlab/simulink 平台上搭建双馈异步发电机基于改造的四机两区域[28]的测试系统,控制方式均已在图中标出,其控制结构如图8 所示:

图8 仿真模型结构图
选取额定风速为12 m/s,风力发电机组最大容量为800 MW,额定电压575V,额定频率为60 HZ,负荷为1745 KW,输电线路全长为30 KM;短路故障模拟电力系统故障中最为常见的单相接地短路,短路点位于距离发电机组10 KM 处;交流输电线路电压采用25 kV 来模拟,高压直流输电线路额定电压为120 kV,换流器均采用PWM 调制波来控制IGBT 的触发角;负荷突变接入的额外负荷的额定容量为500 MW;四台发电机额定电压为600 V,额定容量均为900 MW,额定转速为120 rad/s,四台发电机均装有调速控制系统,只有G1 装有自动发电控制技术AGC 辅助系统调频,G1 具有作为备用容量随时为交直流系统弥补因风力发电机发生扰动导致有功功率输出不足引起的系统有功不平衡状况。
4.2 扰动1:风速持续扰动
风速持续性扰动条件下,无频率控制方式、基于PID 控制方式和基于ADRC 控制方式并网的频率变化仿真曲线如图9 ~11 所示。无频率控制方式并网时频率基本在58.5 HZ 处上下波动,在7s ~8.2 s 有较大的向下降落情况,直至56 HZ,最大波动量为2 HZ;基于PID 控制方式并网时系统频率基本稳定在60 HZ 处,随着风速随机波动产生微小波动误差,最大波动为0.002 HZ;基于ADRC 控制方式并网时系统2 s 后达到稳定,频率稳定为60 HZ。风速持续扰动过程中,本文重点分析不同控制方式的抗扰动能力及频率恢复稳定运行的能力。

图9 无附加控制并网系统频率变化曲线

图10 基于PID控制并网系统频率变化曲线
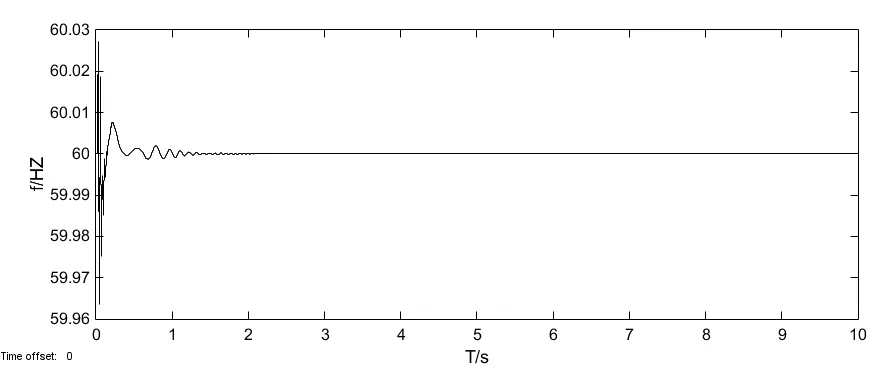
图11 基于ADRC控制并网系统频率变化曲线
由图9 ~11 在风速持续扰动情况下各种控制方式并网频率变化仿真曲线,结合文献[9]中的仿真曲线,得出各种控制方式在风速持续扰动情况下的抗扰动性能如表2 所示,可直观的看出各种控制方式下并网的鲁棒性能。

表2 不同控制方式并网在风速持续扰动频率曲线分析
4.3 扰动2:风速间歇性扰动
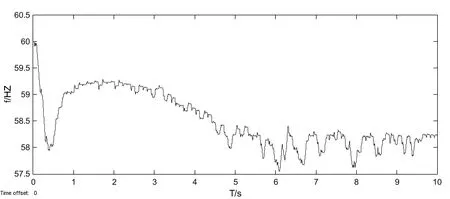
图12 无附加控制并网系统频率变化曲线
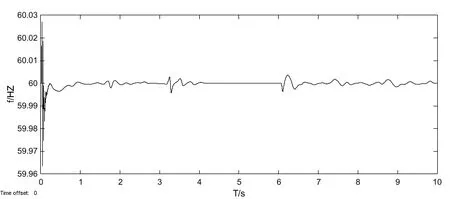
图13 基于PID控制并网系统频率变化曲线

图14 基于ADRC控制并网系统频率变化曲线
在3s ~6s 时间段风速间歇性扰动(即该时间段无风速输入),无频率控制方式、基于PID 控制方式和基于ADRC 控制方式并网的频率变化仿真曲线如图12 ~14 所示。无频率控制方式并网系统频率持续下降且有较小扰动,频率由59.3HZ 下降至57.6 HZ,且风速恢复之后频率无法快速恢复,反而产生较大抖动,最大波动量为1 HZ;基于PID 控制方式并网系统频率发生微小扰动,无风速输入、风速重新输入瞬间到频率重新稳定时间为1s,最大超调量为0.005 HZ;基于ADRC 控制方式并网系统频率最大波动量为0.00027 HZ,经过0.5 s 后稳定于60 HZ。风速间歇性扰动过程中,本文重点分析不同控制方式的抗扰动能力及频率恢复稳定运行的能力。
由图12 ~14 在风速间歇性扰动情况下各种控制方式并网频率变化仿真曲线,结合文献[9]中的仿真曲线,得出各种控制方式在风速间歇扰动情况下的抗扰动性能如表3 所示,可直观的看出各种控制方式下并网的鲁棒性能。

表3 不同控制方式并网在风速间歇扰动频率曲线分析
4.4 扰动3:负载突变
负载突变仿真结果如图15 ~17 所示。4.4 s ~8.2 s 接入额外负荷时,无频率控制方式并网系统频率发生大规模扰动,最大波动量为1.8 HZ,且不能恢复稳定;3.1 s ~6.2 s 时间段接入额外负载时,基于PID 控制方式并网系统频率有微小波动,最大波动为0.001 HZ,接入、断开额外负荷时,系统频率重新稳定时间为1 s;3.1 s ~6.2 s 时间段接入额外负载时,基于ADRC 控制方式并网系统频率稳定60 HZ。负载突变过程中,本文重点分析不同控制方式的抗扰动能力及频率恢复稳定运行的能力。
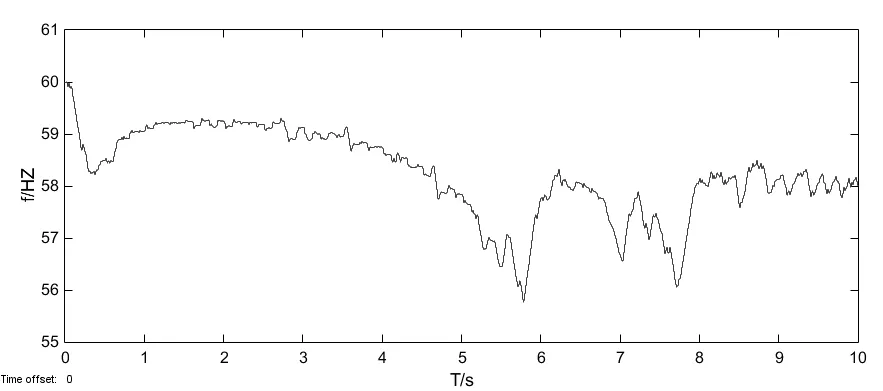
图15 无附加控制并网系统频率变化曲线

图16 基于PID控制并网系统频率变化曲线
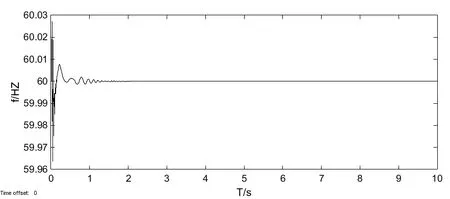
图17 基于ADRC控制并网系统频率变化曲线
由图15 ~17 在负载突变扰动情况下各种控制方式并网频率变化仿真曲线,结合文献[9]中的仿真曲线,得出各种控制方式在负载突变扰动情况下的抗扰动性能如表4 所示,可直观的看出各种控制方式下并网的鲁棒性能。

表4 不同控制方式并网在负载突变频率曲线分析
4.5 扰动4:短路故障
5 s 处发生单相接地短路故障,无频率控制方式、基于PID 控制方式和基于ADRC 控制方式并网的频率变化仿真曲线如图18 ~20所示。无频率控制方式并网系统频率产生较大规模波动至6 s 处,最大波动量为1.2 HZ,随后在58.3 HZ 处基本接近稳定;基于PID 控制方式并网频率稳定于60 HZ,最大超调量为0.027 HZ;基于ADRC 控制方式并网系统频率稳定为60 HZ。短路故障过程中,本文重点分析不同控制方式的抗扰动能力及频率恢复稳定运行的能力。
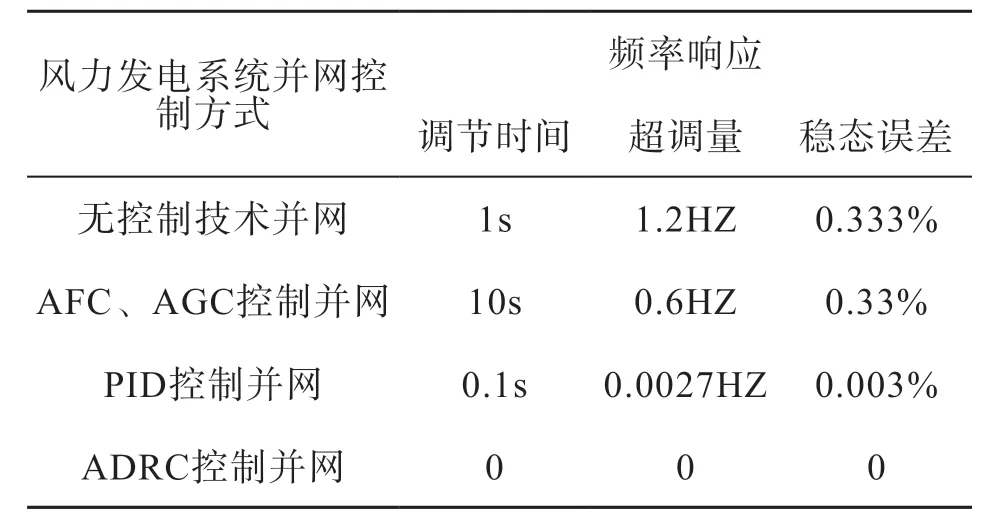
表5 不同控制方式并网在短路故障频率曲线分析
由图18 ~20 在当相接地短路故障扰动情况下各种控制方式并网频率变化仿真曲线,结合文献[9]中的仿真曲线,得出各种控制方式在短路故障扰动情况下的抗扰动性能如表5 所示,可直观的看出各种控制方式下并网的鲁棒性能。
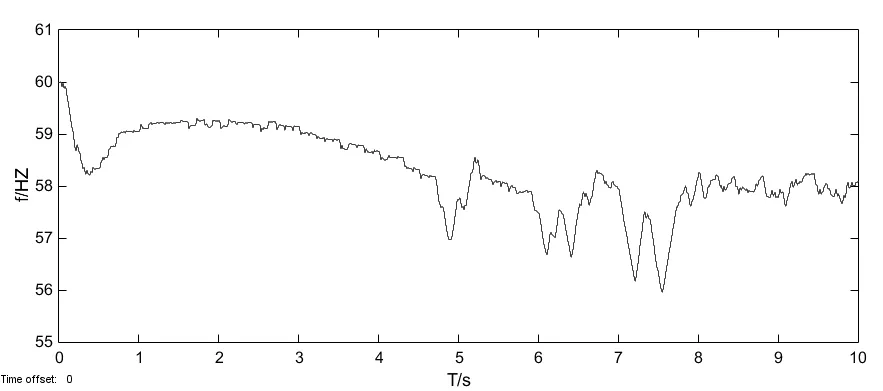
图18 无附加控制并网系统频率变化曲线

图19 基于PID控制并网系统频率变化曲线
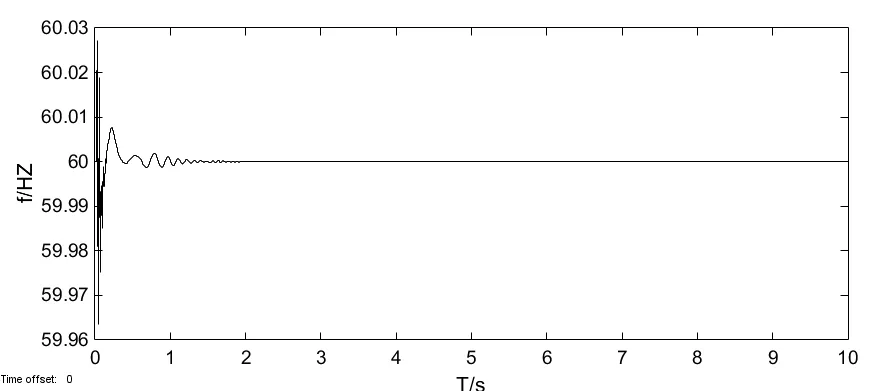
图20 基于ADRC控制并网系统频率变化曲线
5 结束语
通过对所提出策略基于PID/ADRC 控制技术的惯性响应、基于AFC 控制技术的HVDC 辅助频率控制的一次调频技术和基于PID/ADRC控制器的AGC 频率控制的二次调频技术相互配合,在MATLAB/SIMULINK 平台上搭建仿真模型,结合文献[9]中的仿真结果分析本文得到仿真结果,得出结论:
1)在HVDC 附加AFC 控制技术的一次调频技术和基于PID 控制器的AGC 二次调频技术的基础上引入基于PID 控制器的惯性响应的风力发电调频技术,能使含风电接入的交直流电力系统频率的鲁棒性能加强;
2)基于ADRC 控制技术的频率辅助控制策略的抗干扰能力优于基于PID 控制技术的频率辅助控制策略;
3)利用自抗扰控制技术(ADRC)改善含风电接入的系统的调频性能提供了新的思路。
猜你喜欢
中学生数理化·八年级物理人教版(2023年6期)2023-05-25 11:59:36
数学物理学报(2022年4期)2022-08-22 04:06:36
数学物理学报(2019年4期)2019-10-10 02:38:56
建材发展导向(2019年13期)2019-08-24 06:37:40
电子制作(2019年7期)2019-04-25 13:16:50
山东工业技术(2016年15期)2016-12-01 05:31:27
贵州师范学院学报(2016年3期)2016-12-01 03:53:52
照明工程学报(2016年3期)2016-06-01 12:17:56
电源技术(2015年11期)2015-08-22 08:50:38
电测与仪表(2014年1期)2014-04-04 12:00:32