
国产某纯电动汽车操纵稳定性测试及评价
2019-12-27 03:52:38张晓龙熊乐吴云兵李宪斌
汽车实用技术 2019年24期
张晓龙,熊乐,吴云兵,李宪斌
国产某纯电动汽车操纵稳定性测试及评价
张晓龙1,熊乐2,吴云兵2,李宪斌2
(1.中国汽车技术研究中心有限公司,天津 300300;2.中汽研汽车检验中心(宁波)有限公司,浙江 宁波 315336)
操纵稳定性是汽车安全性能的重要组成部分,现代汽车检测技术是推动汽车产业发展的重要因素。文章阐述了操纵稳定性试验的道路试验方法,并简要介绍了操稳试验的测试变量及测试设备。根据汽车产品定型试验要求,对某国产纯电动汽车的转向回正性能试验、转向轻便性试验及稳态回转试验开展研究。操稳试验评价结果表明:该国产纯电动汽车操控性能表现优异,达到了同级产品的标杆水平。
纯电动汽车;操纵稳定性;测试;评价
前言
当前,全球汽车产业正朝着电动化、智能化等方向迅猛发展,电动汽车的主动安全性能是汽车领域研究的热点问题。操纵稳定性是汽车主动安全性能的重要组成部分,它不仅影响汽车驾驶的操纵方便程度,而且也是决定高速汽车安全行驶的一个主要性能,所以人们称之为“高速车辆的生命线”[1]。
在操纵稳定性研究过程中,试验样车性能参数的测量技术是我们获得车辆响应的重要手段,现代汽车检测技术是推动汽车产业发展的重要因素。因此,如何通过有效的测量技术手段准确地采集车辆响应数据,对车辆的试验和评价有重要意意义[2]。
本文以某国产纯电动汽车为研究对象,根据汽车产品定型试验要求,对试验样车的转向回正性能试验、转向轻便性试验及稳态回转试验开展研究,并对试验结果进行分析与评价。
1 道路试验方法
道路试验是研究车辆操纵稳定性的基本手段,道路试验方法对试验样车的测试结果有重要影响。
1.1 试验标准
为了制定统一的汽车操纵稳定性试验标准,国际标准化组织(ISO)制定了ISO 3888-1 《乘用车—急剧变道操作的试验车道—第一部分:双车道变换》、ISO 7401 《道路车辆—横向瞬态响应试验方法—开环试验方法》、ISO 3888-1 《乘用车—急剧变道操作的试验车道—第二部分:避障》及ISO 4138 《乘用车—稳态圆周行驶—开环试验方法》等试验标准。
我国于1994年参照ISO标准制定了GB/T 6323-1994 《汽车操纵稳定性试验方法》,并在2014年发布实施了新修订的标准GB/T 6323-2014 《汽车操纵稳定性试验方法》。当前,我国企业与检测机构主要依据GB/T 6323-2014和QC/T 480-1999两项标准对汽车新产品进行定型试验[3-4]。
1.2 试验方法
1.2.1 转向回正性能试验
转向回正性能试验包括低速回正试验和高速回正试验。试验按向左转和向右转两个方向进行,每个方向三次。
低速回正试验是指车辆以(4±0.2)2侧向加速度沿半径为15m的圆进行稳态行驶时,迅速松开方向盘,记录松手后至少4s的汽车运动过程,记录时间内油门踏板位置保持不变。
高速回正试验是指车辆以最高车速的70%并四舍五入为整数倍的车速直线行驶时,转动方向盘使得车辆侧向加速度达到(2±0.2)2,稳定一段时间后迅速松开方向盘,记录松手后至少4s的汽车运动过程,记录时间内油门踏板位置保持不变。
1.2.2 轻便性试验
转向轻便性又是汽车操纵稳定性的重要方面。驾驶员控制汽车行驶方向时,转向盘所需转向力的大小应适度,与汽车改变方向的运动状态有对应关系,保证有“清晰”的“路感”,转向过重或过轻都不利于驾驶员驾驶操作[5]。
轻便性正试验是指驾驶员操纵方向盘,使车辆以(10±2)的车速沿双纽线行驶,汽车沿双纽线行驶一周至记录起始位置,即完成一次试验,全部试验应进行三次。
1.2.3 稳态回转试验
稳态回转试验是汽车操纵稳定性测试中最基本的方法。稳态回转试验是指车辆以最低稳定车速沿着半径为15m的圆行驶,稳定一段时间后,缓慢而均匀地加速,直至侧向加速度达到6.52(或受发动机功率限制而能达到的最大侧向加速度、或汽车出现不稳定状态)为止。整个试验记录过程中,方向盘转角保持不变,试验按向左转和向右转两个方向进行,每个方向试验三次。
1.3 试验条件
试验场地应为干燥、平坦而清洁的,用水泥混凝土或沥青铺装的路面,任意方向的坡度不应大于2%。试验时,风速应不大于5,大气温度在0℃~40℃范围内。
试验前,测量测量定位参数。对转向系、悬架系统进行检查、调整和紧固,按规定进行润滑。采用新轮胎试验,试验前应至少经过200km正常进行的磨合;若使用旧轮胎,试验终了时残留轮胎花纹深度不小于1.6mm。轮胎气压符合汽车出厂技术要求。试验前,以试验车速直线行驶10km,或者沿半径为15m的圆周、以侧向加速度达到32的相应车速行驶500m(左转与右转各进行一次),使轮胎升温。
转向回正性能试验、转向轻便性试验及稳态回转试验载荷状态为最大设计总质量和轻载两种状态。轻载状态指汽车整备质量状态除驾驶员、试验员及仪器外,没有其他加载物的状态。对于承载能力小的汽车,如果轻载质量已超过最大总质量的70%,则不必进行轻载状态的试验。试验车辆的装载物分布应符合GB/T 12534中3.1的规定[6]。
2 测试设备
2.1 测试变量及要求
表1 操稳试验测量变量及评价指标
表2 试验测试变量的范围及要求
表1给出了转向回正性能试验、转向轻便性试验及稳态回转试验的测试变量、数据处理中需要绘制的变量特性图及评价指标。操纵稳定性试验主要的测量变量包括车辆前进速度、侧向加速度、横摆角速度、侧倾角、方向盘转角及方向盘力矩[7]。
操纵稳定性试验测试变量较多,且对数据测量系统要求较高,主要测试变量的范围及要求如表2所示。
2.2 测试设备简介
为满足试验方法及测量变量精度要求,道路试验设备采用英国Racelogic公司的VBOX3i数据采集器、IMU04型惯性陀螺仪和日本SOHGOHKEISO公司的TR60-200Nm型方向盘测力计系统。
2.2.1 数据采集器
VBOX3i双天线数据采集器(VB3iSL)是Racelogic公司生产的GPS数据记录系统。通过利用“固定基线RTK装备”中的两个GPS引擎配置,VB3iSL结合了高精度和测试可重复性,能以100Hz的速率测量侧滑角和俯仰/侧倾角。数据可以实时显示(利用USB/RS232串行连接线)并直接记录数据到闪存卡易于传输到PC机上。
VB3iSL包括4个可以从外部传感器记录数据的高分辨率模拟输入通道和2路CAN总线接口可以在连接Racelogic输入模块同时通过第二个CAN总线同步传送GPS数据,VBOX3i数据采集器输入/输出如图1所示,接口如图2所示。

图1 VBOX3i数据采集器输入/输出

图2 VBOX3i数据采集器接口
2.2.2 惯性陀螺仪
IMU04模块是VBOX3i数据采集器的辅助设备,IMU04惯性陀螺仪能够采集样车的纵向加速度、侧向加速度、横摆角速度等试验参数。为了确保同步,供电前IMU04惯性陀螺仪必须要连接到VBOX3i数据采集器。

图3 IMU04惯性陀螺仪
2.2.3 方向盘测力计系统
转向轻便性试验需要采集样车的转向盘转角及转向盘力矩,日本SOHGOHKEISO公司的TR60-200Nm型方向盘测力计系统通过25针接口与VBOX3i数据采集器连接,便可实现上述参数的采集。

图4 方向盘测力计系统
3 测试结果分析及评价
3.1 测试结果分析
道路试验样车为某国产纯电动汽车,样车参数如表3所示。
表3 道路试验样车参数

3.1.1 转向回正试验结果
低速转向回正试验的试验结果如表4所示。图5为左转第一次横摆角速度时间历程曲线,图6为右转第一次横摆角速度时间历程曲线。
表4 低速转向回正试验结果

高速转向回正试验的试验结果如表5所示。图7为左转第一次横摆角速度时间历程曲线,图8为右转第一次横摆角速度时间历程曲线。
从试验结果及曲线可以看出,转向回正性能试验的横摆角速度时间历程曲线趋于收敛,且在较短时间达到稳定状态,残留横摆角速度控制在合理范围内。
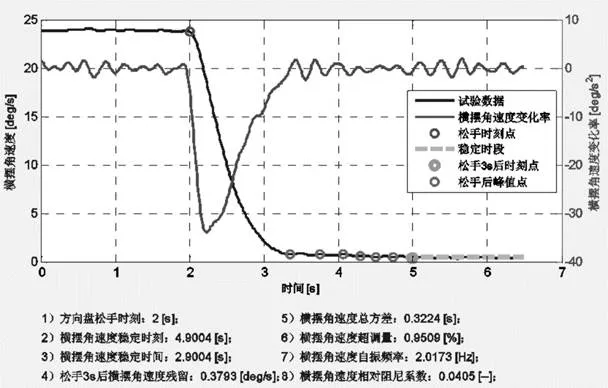
图6 右转第一次横摆角速度时间历程曲线
表5 高速转向回正试验结果


图8 右转第一次横摆角速度时间历程曲线
3.1.2 轻便性试验结果
轻便性试验的试验结果如表6所示。图9为第一次转向盘转角与力矩曲线。
表6 轻便性试验结果

从表6可以看出,样车方向盘平均作用力控制在10N左右,保证了较小的转向力,同时驾驶员能感受到较好的路感反馈。
3.1.3 稳态回转试验结果
稳态回转试验的试验结果如表7所示。图10为第一次转向盘转角与力矩曲线,图11为第一次前后轴侧偏角差与力矩曲线,图12为第一次侧倾角与力矩曲线。
表7 稳态回转试验结果


图11 左转第一次前后轴侧偏角差与侧向加速度曲线

图12 左转第一次侧倾角与侧向加速度曲线
从上述试验结果及曲线可以看出,样车具有适当的不足转向性能,且车身侧倾角控制在合理范围内,具有优秀的稳态转向特性。
3.2 测试结果评价
3.2.1 转向回正试验评价
转向回正试验按残留横摆角速度Δ及横摆角速度总方差E两项指标进行评价计分。对于进行低速与高速回正性能试验对的汽车,其综合评价计分值按式(1)计算。

式中:
N——转向回正试验的综合评价计分值;
N——低速回正试验的残留横摆角速度Δ的评价计分值;
N——低速回正试验的横摆角速度总方差E的评价计分值;
N'——高速回正试验的残留横摆角速度Δ的评价计分值;
N'——高速回正试验的横摆角速度总方差E的评价计分值。
3.2.2 轻便性试验评价
轻便性试验按转向盘平均操舵力F与转向盘最大操舵力F两项指标进行评价计分,轻转向轻便性试验的综合评价计分值按式(2)计算。

式中:
N——转向轻便性试验的综合评价计分值;
N——转向盘平均操舵力F的评价计分值;
N——转向盘最大操舵力F的评价计分值;
η=0.6+0.08G——与汽车总质量G(单位t)有关的加权系数。
3.2.3 稳态回转试验评价
稳态回转中性点的侧向加速度a、不足转向度与车身侧倾角K三项指标进行评价计分,转向回正试验的综合评价计分值按式(3)计算。
式中:
N——稳态回转试验的综合评价计分值;
N——中性转向点的侧向加速度a的评价计分值;
N——不足转向度U的评价计分值;
N——车身侧倾角的评价计分值。
3.2.4 稳操纵稳定性试验评价
根据操纵稳定性试验测试结果,对前述三项试验逐一进行单项,最终评价计分结果为三项试验单项计分的平均值,整理如表8所示。
表8 操稳评价计分结果总表

从上述结果可以看出,该国产纯电动汽车操纵稳定性总评分达到了92.5,远远超过60分的及格线,表现出优异的操纵性能,特别是在稳态回转试验中的车身姿态控制和转向轻便性表现两方面。
4 结论
本文阐述了操纵稳定性试验的道路试验方法,并简要介绍了操稳试验的测试变量及测试设备。根据汽车产品定型试验要求,对某国产纯电动汽车的转向回正性能试验、转向轻便性试验及稳态回转试验开展研究。操稳试验评价结果表明:该国产纯电动汽车操控性能表现优异,达到了同级产品的标杆水平。
[1] 余志生.汽车理论(第6版)[M].北京:机械工业出版社,2018.
[2] 曹建永.基于人-车-路闭环系统的汽车操稳试验及评价方法研究[D].上海交通大学,2015.
[3] GB/T 6323-2014 汽车操纵稳定性试验方法[S].
[4] QC/T 480-1999 汽车操纵稳定性指标限值与评价方法[S].
[5] 高军等.汽车转向轻便性试验数学解析研究[J],合肥工业大学学报(自然科学版),2012年第4期:467-471.
[6] GB/T 12534-1990汽车道路试验方法通则[S].
[7] 郭润清等.汽车操纵稳定性道路试验和评价系统设计[J],北京汽车,2015年第1期:37-41.
Test and Evaluation of Handling Stability of a Domestic Pure Electric Vehicle
Zhang Xiaolong1, Xiong Le2, Wu Yunbing2, Li Xianbing2
( 1.China Automotive Technology and Research Center Co. Ltd., Tianjing 300300;2.CATARC Automotive Test Center (Ningbo) Co. Ltd., Zhejiang Ningbo 315336 )
Handling stability is an important component of automobile safety performance. Modern automobile test technology is an important factor to promote the development of automobile industry. This paper has interpreted the road test method of handling stabilityt, and has briefly introduces the test variables and test equipment of handling stability test. According to the requirements of automobile product stereotyping test, the steering restoring test, steering efforts test and steady-state circular test of a domestic pure electric vehicle are studied. The evaluation results of handling stability test show that the performance of the domestic pure electric vehicle is excellent, reaching the benchmark level of the same grade products.
PEV; Handling Stability; Test; Evaluation
U467.1
A
1671-7988(2019)24-26-05
U467.1
A
1671-7988(2019)24-26-05
10.16638/j.cnki.1671-7988.2019.24.009
张晓龙(1978-),高级工程师,就职于中国汽车技术研究中心有限公司,研究方向:汽车被动安全。
猜你喜欢
大电机技术(2022年3期)2022-08-06 07:48:24
核科学与工程(2021年4期)2022-01-12 06:30:04
煤气与热力(2021年4期)2021-06-09 06:16:54
现代仪器与医疗(2021年1期)2021-06-09 05:53:54
中华戏曲(2020年1期)2020-02-12 02:28:18
中学生数理化·高一版(2017年3期)2017-07-08 11:55:27
计算机测量与控制(2017年6期)2017-07-01 16:24:05
计算机测量与控制(2017年6期)2017-07-01 16:24:04
火控雷达技术(2016年1期)2016-02-06 02:18:01
中国铁道科学(2015年4期)2015-06-21 06:46:06
