
基于GPS诱骗的低空民用无人机干扰技术研究
2019-12-23 03:20颜靖华周枚林任春华
中国电子科学研究院学报 2019年6期
颜靖华,侯 毅,宋 滔 ,周枚林,彭 亮,任春华
(1.中国人民公安大学,北京 100038;2.公安部科技信息化局,北京 100741;3.中国电子科技网络信息安全有限公司,四川 成都 610041;4.重庆大学,重庆 400044)
0 引 言
近年来,随着信息、控制、通讯等领域技术的不断发展成熟,硬件微型化、低功耗、低成本等技术进步,使得现代无人机具有小型化、轻量化、低成本、可控性好、适应性强、灵活性高、鲁棒性好、功能齐全等优点[1-2],而且无人机在军用和民用领域有着广泛的应用前景。与此同时,由于无人机本身技术原因造成的安全隐患以及目的性的无人机入侵飞行,对国家领域领空、重要目标、公共场所、航空飞行、公民隐私[3]等安全带来了潜在的巨大威胁。针对无人机使用的监管以及对入侵无人机的反制也成为讨论和研究的热点。
世界各国现有的反无人机系统在类型、技术路线上都存在着差别。目前被主要采用的技术有电磁信号干扰、声波干扰、激光武器、黑客入侵、物理捕获等,这些技术研制的反无人机系统大致可分为干扰阻断[4]、毁伤抓捕[5]和监测控制[6]三大类。
目前,市面上的低空民用小型无人机通常都采用了GPS和MIMU组合的导航方式,利用MIMU短时间内精度高的特点在GPS信号弱或受屏蔽情况下为无人机提供持续的导航功能,同时,有效的GPS信号可作为MIMU的参考,并对其进行修正。近几年,针对高度低、速度慢、体积小、重量轻的低空无人机的探测与防护问题,科研人员开展了大量的研究和试验,对于低空小型目标探测感知、无人机防护与压制等技术取得了一些成果[7,8]。在欲防护的区域内,通过持续朝无人机发射定向高功率的干扰RF信号,使无人机处于扰乱信号的屏障中,可以阻断无人机接收遥控器的控制信号或导航信号。从而迫使无人机进入自动降落、自动返航或自动导航阶段。即使无人机通信控制信号受到压制,无人机仍可通过预先设定的航线或位置坐标继续朝着既定目标前进,由此还需进一步对其采取导航干扰措施。随着通信技术的发展,基于GPS诱骗的思想成为了针对无人机导航系统常用的干扰策略。文献[9]通过实时产生虚假的GPS 信号,并在该空间内替代真实GPS 信号欺骗无人机改变其定位结果。该自主产生式欺骗干扰方法对于干扰信息的设置较为灵活,但需要破译加密的GPS信号码,技术实现较为复杂。文献[10]提出的转发式欺骗干扰仅需对接收的GPS信号引入人为延时改变伪距值,从而影响定位解算,技术实现上相对容易。文献[11] 针对GPS转发式干扰存在定位跳变的问题,提出一种基于时延控制的GPS 转发欺骗干扰长距离飞行器的思想,通过雷达辅助探测和估计飞行器轨迹。现有的基于延迟转发的欺骗干扰研究将研究重点主要放在了对飞行器轨迹预测与探测、转发延迟时间讨论、定位跳变讨论上,并取得很好成果,但较少讨论GPS和惯性器件组合导航的无人机系统在受到GPS欺骗干扰时的误差分析和加入时延的伪距设置问题,也较少讨论干扰卫星数量问题。因此,本文围绕低空民用小型无人机,结合目前较为成熟的无人机通信链路干扰技术,深入研究了切断无人机通信链路后MIMU/GPS组合的GPS定位诱骗干扰问题,通过延迟转发,人为改变可见卫星到无人机的伪距值诱使无人机朝着错误的位置飞行, 研究目标是希望仅通过改变较少卫星的伪距,实现在MIMU独立定位误差范围内较大拉偏定位误差,从而达到有效诱骗,缩短诱骗引导其到达预定坐标的时间。本文重点研究了设置不同GPS伪距误差情况下,对接收机定位的诱骗效果,并通过半实物仿真实验进行了验证。
1 无人机GPS欺骗干扰原理
1.1 GPS 定位原理

图1 GPS定位原理
GPS 接收机通过测量信号从卫星到该地的单向传播时间,并代入位置解算算法确定接收机位置信息[12]。图1表示了测定传播时间的原理,如图中所示,SVi表示GPS接收机同时接收到的各个卫星,利用接收机复制码与卫星发播的伪随机码的相关技术,得到卫星发射信号由卫星到接收机的延时,再乘以电磁波的传播速度可计算出卫星距离接收机的伪距Pi,其中i表示卫星编号,从卫星信号的导航电文中可获得各卫星的位置(xi,yi,zi)。
联立以下方程组即可求解接收机自身位置(x,y,z)。
(1)
按照求解方程未知数的思想,通常来说只需利用三颗导航卫星的信号构建方程组就可以确定接收机位置。然而实际环境下,伪距测量值因GPS信号传输过程中受到的电离层、对流层产生的时延以及卫星和接收机钟差的影响,三颗卫星的解算结果误差较大,因此,需要引入第四颗卫星的观测值进行修正,即需要同时观测至少4颗GPS卫星以实现精确定位。
1.2 GPS延迟转发欺骗干扰
GPS延迟转发欺骗干扰的方法是借助信号转发干扰设备改变某一区域 GPS卫星信号到达接收机的传播时延,使接收机计算出带有偏差的伪距值,最终导致接收机在进行位置解算的时候得到错误的自身位置信息。
转发式欺骗干扰模式下,干扰机无需从信号的内容上对其接收到的各颗卫星信号作改动,而是通过对各卫星的信号添加不同的延时再进行信号功率增强处理最后转发出去,使得在一定区域范围内的接收机接收到干扰机转发的信号。由于干扰信号的幅度大于正常GPS卫星信号,所以干扰信号更有可能被接收机捕获,此时接收机就会计算出错误的距离信息ρi,可表示为:
ρi=Pi+ctu+cΔτi
(2)
式中,Δτi为添加的人为延迟,tu为卫星钟差、接收机钟差以及电离层和对流层影像产生的延时。转发式欺骗干扰示意图如图2。

图2 GPS转发式欺骗干扰示意图
如图2所示,S3表示GPS接收机直接接收到原始卫星信号的路径,虚线部分表示在转发式干扰中GPS卫星信号先经过路径S1达到干扰机添加延时然后经过路径S2至GPS接收机的信号传递过程。
实际的情况中,转发式欺骗干扰过程引入的时延包含两部分,一个是为了实现转发式欺骗而人为引入的延时,即人为时延;另一个是卫星信号在传播路径中,因加入了干扰机这一环节,相较其直接达到GPS接收机多花费的时间,称之为自然时延,该参数主要受到三者间相对距离的影响,可表示为:
(3)
对同一转发式干扰机而言,它所带来的自然时延由接收机与其之间的距离决定,并且对于它转发的所有卫星信号其时延影响都是一样的,此外,继续通过对接收到的不同卫星的信号添加自定义的人为时延,使得计算的对应卫星的伪距观测值出现偏差,最终导致GPS接收机解算出的位置信息发生改变,引入转发式延时的情况下各卫星伪距观测值方程组为:
ctu+cΔτ+cΔτi
(4)
式中,i表示可接收到信号的卫星编号,Δτ为自然时延,Δτi表示添加的人为时延。通过在每个时刻给每个卫星信号加入不同的人为时延,从而使得GPS接收机解算的位置逐渐偏离,并通过逐步的误差累积,使得其到达我们欲欺骗的位置,达到欺骗目的,可通过图3中模型确定设置人为时延[13]。

图3 人为时延设置模型图
如图3所示,卫星与欲欺骗位置伪距为ρ′,干扰系统与卫星伪距为ρ″,GPS接收机与干扰系统间相距ΔS。由前面的分析可得,经转发式干扰系统后的伪距测量值为式(4)。
使接收机伪距测量值为欲欺骗位置,另ρi=ρ′i,即:
ctu+cΔτ+cΔτi=ρi
(5)
根据前面可得:
ctu+cΔτ=ρi+c+Δ+S
(6)
故:
(7)
在无人机干扰系统部署固定后,可根据上述方法为GPS 信号引入预先设定的人为时延,从而实现将 GPS 接收机错误的定位到选定的欲欺骗位置[14]。然而,在实际应用中有可能计算出需要引入负时延的情况,这个问题可以通过对所转发的卫星信号同时加入一个公共时延T来解决。
用τmin表示计算出的最小的人为转发时延Δτi,即:
τmin=min{τ1,τ2,…τi}
(8)
若τmin≥0,则不需设置公共延时,当τmin<0时,设置补偿的公共时延为-τmin,即:
(9)
最终确定的人为时延为:
Δti=Δτi+T
(10)
1.3 无人机惯性导航位置误差方程
无人机捷联惯性传感器推算的数学位置误差微分方程为:
(11)

2 干扰仿真实验及结果分析
2.1 GPS延迟转发干扰实验
为了研究在不被无人机惯性系统识别出定位跳变前提下,验证通过改变不同卫星的伪距值达到较大的拉偏定位误差,开展了接收机定位测试实验。实验设备包括:SOUTH接收机、八频信号转发器、一分四信号分线器,实验设备连接如图4所示。实验室楼顶基站接收到卫星信号,通过线缆牵引入室内连接一分四信号分线器,分线器的接口1连接八频信号转发器将接收到的室外卫星信号经滤波、放大、发射等过程,将有效信号转发至室内,解决室内无法接收到信号的问题。分线器的接口2连接SOUTH接收机,分离接收到的不同卫星的信号,实现对卫星信号的跟踪、处理和量测,并将卫星信号上传至服务器。通过在电脑端访问接收机固定IP,登陆用户界面即可进行实时的卫星信息显示、数据记录、数据传输等,用户界面信息如图5、图6所示。

图4 实验设备连接图

图5 用户界面星空图

图6 接收机定位坐标图
由于伪造GPS信号欺骗接收机的方式实现难度较大且较易被接收机检测出异常导致无法完成欺骗干扰,本次实验重点研究了GPS延迟转发式的欺骗干扰方式。其基本思想是对接收到的GPS卫星信号添加人为时延,再转发给目标接收机,使得接收机得到有偏差的伪距信息并在进行位置解算时得到错误的位置结果。本实验具体开展中直接通过对接收机伪距加入人为误差的方式研究在不同伪距误差情况下接收机定位的表现,这种方式与对信号引入人工时延的作用是等效的。
仿真试验中,依据实际条件(时间、天气等)的变化实验室基站所能接收到的GPS卫星颗数介于6~9颗之间,而GPS定位至少需要四颗卫星的数据才能实现精确定位。只有在有效定位的情况下无人机才会借助于卫星进行导航,在此情况下才可顺利实现GPS欺骗干扰,而且现代无人机通常融合了惯性导航技术[15],一旦切换进入惯性导航状态则GPS干扰效果将会受到影响,尽管无人机单独依靠惯性传感器将不能达到应有的导航精度已经一定程度上对其飞行任务造成干扰破坏,但由于这种情况增加了无人机飞行的不确定性,同时使得干扰变得不可控,无法达到GPS诱骗干扰的目的。因此在实验中不仅要保证卫星颗数足够实现有效定位,还要避免加入伪距误差的卫星信号因为偏差过大,而被接收机检测出异常,使得无人机不采用该颗卫星信号,造成欺骗失败。为了验证在一定范围内的伪距误差对接收机定位误差的表现,本次实验研究了单颗卫星在设置不同伪距误差下,接收机定位误差的表现,以及多颗卫星在设置不同伪距误差下,接收机定位误差的表现情况。实验时加入伪距误差的卫星编号随机选择,分别对该卫星增加了10 m、20 m、30 m的伪距误差,在每种试验下对每一个伪距误差都分别统计了50个点以上的接收机定位位置,接收机的定位结果图如图7~图9所示,该图通过接收机用户服务系统实时显示。
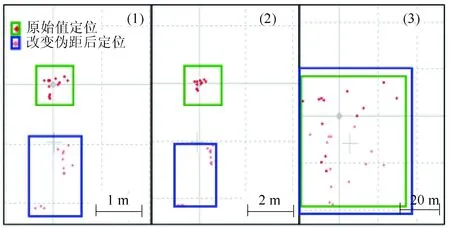
图7 单颗卫星加入伪距误差后定位结果

图8 两颗卫星加入伪距误差后定位结果

图9 三颗卫星加入伪距误差后定位结果
图7中(1)、(2)、(3)分别表示单颗卫星信号加入伪距误差为10 m、20 m、30 m后的接收机定位结果(图中蓝色框所示部分)与未加入伪距误差前定位结果(图中绿色框所示部分);图8中(1)、(2)分别表示两颗卫星信号加入伪距误差为10 m、20 m后的接收机定位结果(图中蓝色框所示部分)与未加入伪距误差前定位结果(图中绿色框所示部分),伪距误差增加到30 m后部分时刻无法定位故不在此处列出;图9中(1)、(2)分别表示三颗卫星信号加入伪距误差为10 m、20 m后的接收机定位结果(图中蓝色框所示部分)与未加入伪距误差前定位结果(图中绿色框所示部分),伪距误差增加到30 m后部分时刻无法定位故不在此处列出。从图中可以看出改变某颗卫星伪距后,接收机是否还能成功定位,以及判断改变伪距的卫星信号是否被接收机所使用,通过估算改变卫星伪距后接收机定位位置与改变前的最大偏移,比较不同实验条件下接收机定位误差的影响程度。此外,还统计了各实验条件下接收机定位位置的极差,来比较接收机定位的离散程度,这也是评价GPS欺骗干扰影响接收机定位效果的重要参考。实施GPS欺骗的目的是要将GPS诱骗至一个确定的错误位置,一旦接收机定位位置离散程度较大会使得接收机定位不可控,从而影响GPS欺骗效果。对单颗和多颗卫星加入不同伪距误差后接收机定位结果的统计如表1、表2所示。

表1 单颗卫星设置不同伪距误差下接收机定位结果

表2 多颗卫星设置不同伪距误差下接收机定位结果
2.2 GPS延迟转发干扰实验结果分析
从实验结果可以看出,两种实验中卫星信号加入不同伪距误差后对比正常卫星信号的接收机定位结果均出现一定偏移。单颗卫星加入10 m伪距误差接收机定位最大偏移约为2 m,定位点极差约为1 m;在加入20 m伪距误差时接收机定位最大偏移超过4 m,定位点极差约为2 m;而继续增大伪距误差到30 m后接收机定位最大偏移降至0.4 m,定位点极差为0.6 m。对两颗卫星加入10 m伪距误差后接收机定位最大偏移超过7 m,定位点极差约为1 m;伪距误差增大到20 m后接收机定位最大偏移超过12 m,定位点极差约为2.5 m;而继续增大伪距误差到30 m后接收机定位出现部分时刻无法定位的情况。对三颗卫星加入10 m伪距误差后接收机定位最大偏移超过3 m,定位点极差约为1 m;增大伪距误差到20 m后接收机定位最大偏移超过12 m,定位点极差约为4 m;而继续增大伪距误差到30 m后接收机定位出现部分时刻无法定位的情况。
由此说明在一定范围内随着加入的伪距误差的增大,在可成功定位情况下接收机的定位偏差逐渐增大,但超过该范围后,继续增大伪距误差将使得该卫星信号不被采用,反而提高了接收机定位精度。同时,在可成功定位情况下,增加改变伪距的卫星颗数,也会使得接收机的定位偏差逐渐增大。但增加改变伪距的卫星颗数后,会加大定位点的离散程度,同时改变多颗卫星伪距的实现难度也会更大,甚至出现某些时刻接收机无法成功定位的问题,使得将无人机诱骗至确定位置的可控性变弱。综上所述,结合现有消费级民用无人机惯性定位的误差(大约在3~15 m甚至更大),叠加GPS前一时刻本身定位误差约5 m左右,计算取MIMU最小误差,可得GPS欺骗定位误差在8 m内能够实现有效欺骗,从实验统计表1、表2可见,选择两颗卫星加入10~20 m 之间的伪距误差可以有效避免GPS欺骗干扰的定位突变问题并且使定位误差达到最大。采用以上方案再通过连续施加人为时延,可将无人机诱骗至远离目标位置的欲欺骗位置。
3 结 语
无人机技术是革命性的科技和新兴的产业,伴随其繁荣发展而来的是多机“黑飞”和滥用等危害极大的社会问题,本文围绕低空民用小型无人机,结合目前较为成熟的无人机通信链路干扰技术,深入研究了切断无人机通信链路后MIMU/GPS组合的GPS定位诱骗干扰问题,本文重点研究了通过改变较少卫星伪距的情况下,在MIMU独立定位误差范围内达到较大拉偏定位误差,并通过半实物仿真实验进行了验证。实验结果表明,在一定范围内卫星信号加入不同伪距误差后对比正常卫星信号的接收机定位结果均出现一定偏移,而伪距误差继续加大超出该范围后反而使得定位误差降低,由此可见伪距误差加入过大会被接收机检测出异常而判定该卫星信号无效;同时,增加改变伪距的卫星颗数后会加大接收机定位点的离散程度,甚至出现接收机无法正常定位等问题;结合对无人机惯性定位的误差分析,选择两颗卫星加入10~20 m之间的伪距误差可以有效避免GPS欺骗干扰的定位突变问题并且使定位误差达到最大,从而达到有效诱骗,缩短引导其到达预定坐标的诱骗时间。
本研究所提出的欺骗方法可融合无人机通信链路干扰技术构建反制无人机系统,适用于在切断无人机与地面控制台通信后仍按照预定任务目标飞行的低空民用无人机,通过简单、经济的GPS欺骗方式将无人机诱骗至指定区域,本文已通过实验验证了改变卫星信号伪距对接收机定位的诱骗效果,为后续对诱骗轨迹研究和对不少于一个无人机的同时诱骗打下基础。
猜你喜欢
现代经济信息(2022年35期)2023-01-11
地理空间信息(2022年10期)2022-10-31
现代测绘(2022年3期)2022-07-23
导航定位学报(2022年1期)2022-02-17
矿山测量(2020年6期)2021-01-07
太空探索(2020年9期)2020-09-16
电子制作(2019年24期)2019-02-23
电子制作(2018年19期)2018-11-14
电子制作(2016年1期)2016-11-07
导航定位学报(2015年2期)2015-06-05
