
多波束测深技术在长江某水厂取水管现状检查中的应用
2019-12-21 01:49
长江科学院院报 2019年12期
(长江科学院 工程安全与灾害防治研究所,武汉 430010)
1 研究背景
目前,水下建筑物现状检查的主要技术有潜水摸查、水下视频录像、单波束测深技术、多波束测深技术、侧扫声呐和双频声呐识别技术等[1]。潜水摸查和水下视频录像需要在水质清晰、流缓的水域中,进行接触式作业。
单波束测深技术通过布设断面、设置采样点间距,进行逐点测量,采用内插的方式生成等值线,反映水下地形[2]。单波束测深技术测深精度低、采集数据量少、分辨率低,无法全面客观地反映水下建筑物的现状。
侧扫声呐和双频声呐识别技术都是利用声学原理进行声呐成像,得到影像数据,通过人工判读,确定缺陷信息[3]。得到的缺陷信息带有人工的主观性,而且没有位置信息,无法进行定量分析。
多波束测深技术可在一个条带内得到上百个测深点,能高效地得到高精度、高分辨率的水下地形数据[4-6]。与潜水摸查和水下视频录像相比,对水质清晰度和流速没有要求,而且不需要接触水下建筑物,降低安全隐患。与单波束测深技术相比,水底三维地形图的水深值更加密集、精度更高[7]。与声呐技术相比,多波束测深技术能够提供准确的位置信息,可以进行定量分析。通过对多波束测量得到的点云数据进行精细处理和三维建模,可以精确、全面、动态地反映水底微地形地貌,获得高清晰度水底影像。
2 多波束测深系统探测能力
2.1 系统组成
多波束测深系统一般由多波束测深仪、外围辅助传感器、数据采集系统和数据处理系统组成[8]。本文采用Kongsberg EM2040C(双探头)多波束测深仪,整个多波束测深系统的设备组成见表1。

表1 多波束测深系统组成
Kongsberg EM2040C(双探头)多波束测深系统各模块连接见图1。Kongsberg EM2040C(双探头)水下多波束测深仪主要技术指标见表2。
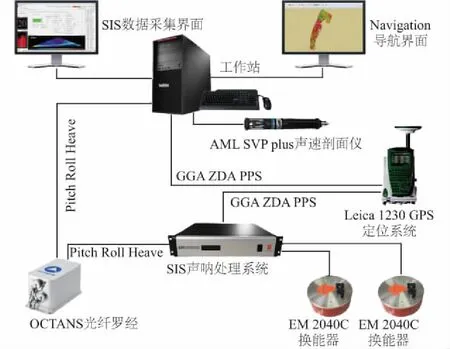
图1 Kongsberg EM2040C多波束测深系统模块连接
2.2 探测能力
多波束测深系统的探测能力由分辨率决定,分辨率是指系统在波束边缘所能够分辨的最小距离[9]。分辨率分纵向分辨率和横向分辨率,由EM2040C发射波束的垂直波束角和水平波束角所决定。
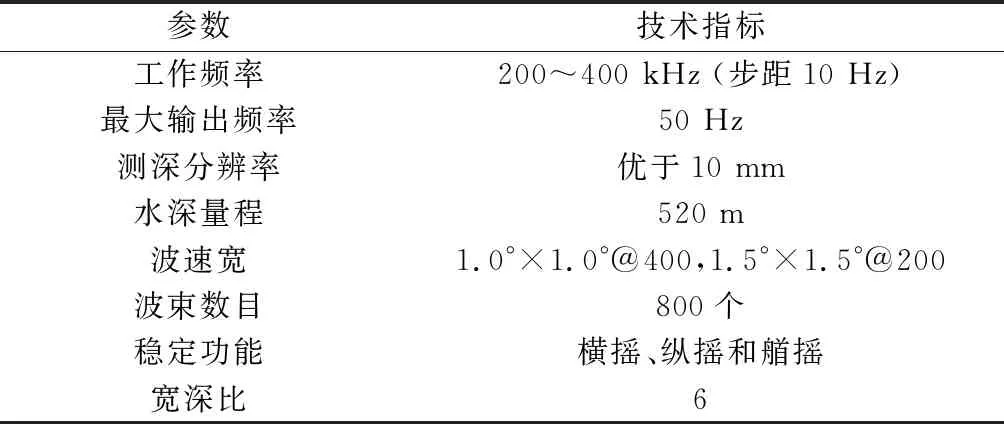
表2 EM2040C多波束测深仪主要技术指标
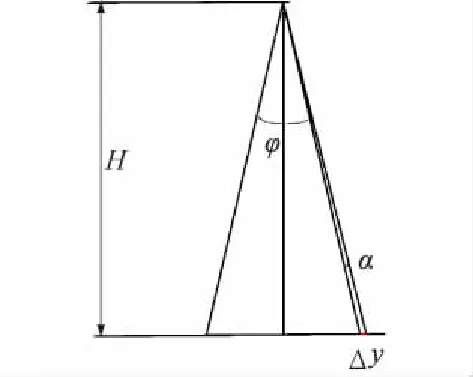
图2 纵向分辨率示意图
纵向分辨率指平行于航迹方向上边缘波束能够分辨的最小距离(见图2),计算公式为
tan(α/2) 。
(1)
式中:H为水深;φ为多波束测深系统纵向接收波束角度;α为多波束测深系统纵向接收波束最小角度。
EM2040C的纵向接收波束宽度为27°,纵向接收波束最小角度为1.0°,20 m水深的纵向分辨率为0.359 m。
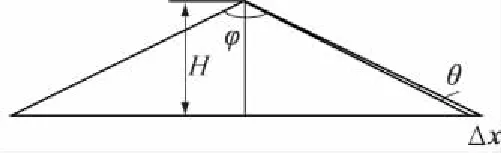
图3 横向分辨率示意图
横向分辨率指垂直于航迹方向上边缘波束能够分辨的最小距离(见图3),计算公式为
Δx=H·[tan(φ/2)-tan(φ/2-θ)] 。(2)
式中:φ为多波束系统横
向发射波束角度;θ为多波束系统横向发射波束最小角度。
EM2040C的横向发射角度一般设置为100°,横向发射波束最小角度为1°,20 m水深的横向分辨率为0.828 m。
3 自适应滤波算法
利用多波束测深技术进行水下地形和断面测量时,通常采用趋势面滤波法、限幅滤波法和中位值滤波法等方法进行数据处理。传统的滤波方法过分要求数据平滑,会造成水底微地形或局部突变数据被剔除[10-11]。利用多波束测深技术进行水下建筑物现状检查,水底突变数据通常代表水下建筑物变形特征点,为了避免变化水深点被不合理删除,本文采用自适应滤波算法进行数据处理。
首先,根据水下突变边界点与其邻域地形连续性不一致的特点,将水下地形数据进行分段,每段数据分别进行自适应滤波处理。本文采用的自适应滤波方法原理见图4。选择一个具有一定高度和长度的圆柱体过滤器,并根据圆柱体长度内的平均值对数据进行步进处理,所有位于圆柱体外部的水深值将会被删除。在对原始较粗糙的数据进行处理时,圆柱体过滤器选择较小的长度和较大的高度,剔除较大的噪点(图4(a));然后选择较大的长度和较小的高度圆柱体过滤器对数据进行更加精细的处理,剔除较小的噪点(图4(b))。

图4 自适应滤波
该方法能够有效地剔除多波束水深数据粗差,同时对特征变化点有效保留,提高了水下地形测量精度,准确表达了水下建筑物变形特征。
4 工程实例
4.1 工程概况
长江某水厂以长江为水源,布设上层和下层取水管各2根(直径1 400 mm),取水口分别用6根钢管桩(直径840 mm)构成的承台进行固定。2017年枯水期,因水位下降,上层取水口裸露出水面,被航行船舶碰撞,造成破损,且该水厂自2013年投入使用后,一直未对取水管现状进行检查。为保证取水管道的正常运行,需要对水下取水管现状进行检查,根据取水管破损现状和位置确定加固和修复方案。

图5 测线布设
4.2 测量实施
4.2.1 测线布设
取水管从岸边向长江中间延伸,上层取水口距离岸边约100 m,下层取水管距离岸边约350 m。首先在测区范围内用多波束扫测得到取水管的位置,为了对取水管进行精密测量和建模,与传统多波束测线平行于水流方向布设方式不同,本次测量测线布设平行于取水管方向(垂直于水流方向)。本次测量一共布设6条测线,见图5。取水管上方、左右各布设2条往返测线,左右方向布设测线是为了扫测钢管桩和承台,往返测线是为了数据处理时对缺陷进行验证。
4.2.2 扫测宽度、波束角、船速选择
Kongsberg EM2040C(双探头)左右探头分别可以调节最大扫测角度130°,中间重叠30°区域,因此最大可以达到200°开角的扫测宽度。虽然扫测宽度决定测量效率,但是对于水下建筑物现状检查,最重要的是获取高分辨率的水下地形数据。多波束扫测得到的中央波束信号精度最高,根据测线布置的特点,6条测线扫测开角设置见表3。取水管上方测线利用中央波束得到高精度的点云数据,对取水管现状进行检查;左右测线根据航行方向调整左右探头的发射开角,对钢管桩和承台现状进行检查。

表3 扫测角度设置
波束角越小,探测水底地形特征就越细致。在进行水下精细检查中,应尽可能选择波束角小的多波束测深系统,本次测量选择1.0°×1.0°波束角,得到的数据能够更加直观细致地反映取水管破损现状。
在多波束全覆盖扫测中,船速不宜过快。船速过快会在航向重叠的点云不密,分辨率不高,对扫测物体形成盲区,遗漏缺陷。根据实际测量经验,建议船速控制在5节(1节=1.852 km/h)以内[12]。
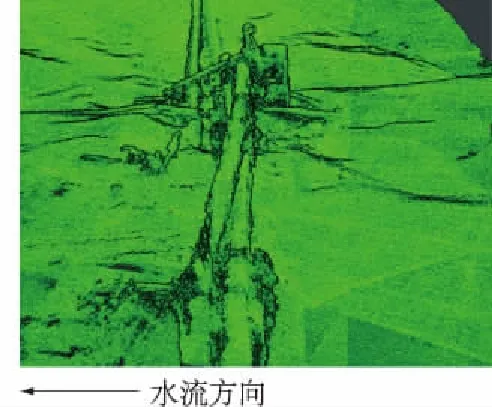
图6 上层取水管残留情况
4.3 结果分析
通过对多波束测量的高精度、高分辨率水下点云数据进行数据处理和三维建模,得到的结果能够直观、定量地反映取水管破残现状和破损位置。上层取水管残留情况如图6所示,下游(图6左侧)方向取水管因碰撞已经偏离原始位置,向上游(图6右侧)方向摆动。在距离岸边约30 m的位置,下游方向取水管已经移动至上游方向取水管上部,上层2根取水管呈交叉状态。
上层承台现状如图7所示,整个承台向上游方向倾倒约90°,上层取水口方向朝上游方向。上层承台6根钢管桩均已倾斜,其中5号、6号钢管桩已经和承台脱离。下层取水管有两处断裂,如图8所示。

图7 上层承台现状
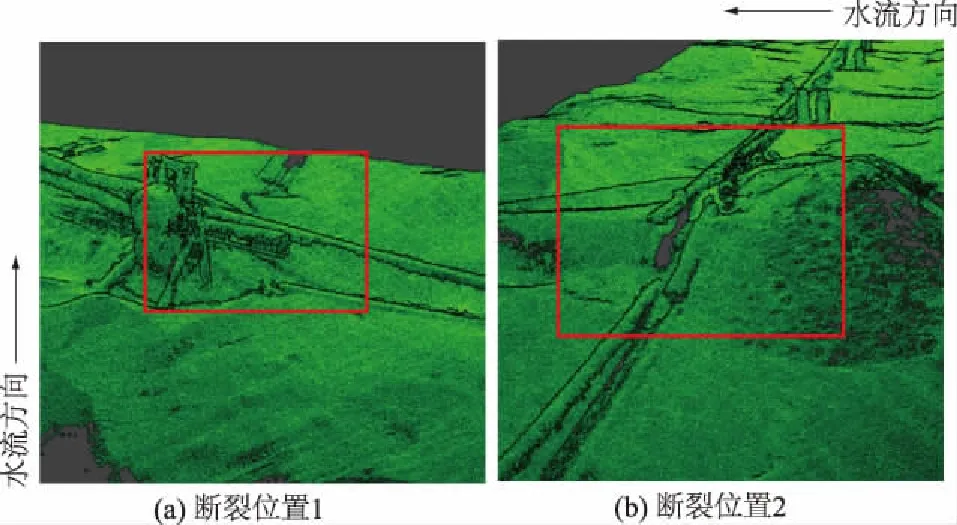
图8 下层取水管断裂位置
5 结 语
目前多波束测深技术主要应用于水下地形测量,绘制等深线和断面图。针对长江某水厂取水管的现状检查,所处位置水质浑浊、流速较大,传统潜水摸查和水下视频录像方式无法进行。本文通过设计测线,合理选择扫测角度、波束角,对点云数据进行精细处理和三维建模,直观地展示了取水管破残现状和破损位置,为该水厂取水管加固和修复项目提供了全面的水下现状信息,成功地将多波束测深技术应用于水下建筑物现状检查和缺陷精密测量。
猜你喜欢
黑龙江水利科技(2021年8期)2021-09-03
锦绣·中旬刊(2021年9期)2021-08-31
成都信息工程大学学报(2021年6期)2021-02-12
珠江水运(2020年22期)2020-12-23
舰船科学技术(2020年3期)2020-04-22
土木与环境工程学报(2019年6期)2020-01-13
通信技术(2019年3期)2019-05-31
家庭影院技术(2018年9期)2018-11-02
制造技术与机床(2017年7期)2018-01-19
自动化学报(2017年5期)2017-05-14
