改进遗传算法在机器人路径规划中的应用
2019-12-20 03:02郑宝娟张婷宇
科教导刊·电子版 2019年29期
郑宝娟 张婷宇

摘 要 针对传统遗传算法规划的路径点不连续,不平滑的不足,对遗传算法进行了改进,首先通过碰撞侦测来探测前进路径中的障碍物,再利用遗传算法结合B样条曲线规划出平滑的避障路径。实验表明了新算法路径规划结果更平滑,效果更好。
关键词 遗传算法 B样条 路径规划
中图分类号:TP242.6文献标识码:A
0引言
路径规划是人工智能和机器人领域研究的热点问题之一,属于NP难问题。规划目标是在具有障碍物的环境中,从机器人的指定起点开始,规划出一条运行安全的、时间最优的路径,并且机器人能够沿着该路径绕过所有障碍物到达指定终点。近些年,遗传算法已经被广泛地用在机器人的路径规划中。然而大部分的路径规划都没有考虑到路径平滑优化,以产生最短路径为目标,从而规划出的路径为曲折的线段集合,而不是连续平滑的曲线,往往会造成应用上的困扰。本文利用遗传算法和 B 样条曲线生成算法,生成平滑的避障路线,从而避免因为运动方向突变,转弯产生的机器人齿轮的磨损和突然减速带来的位置误差。
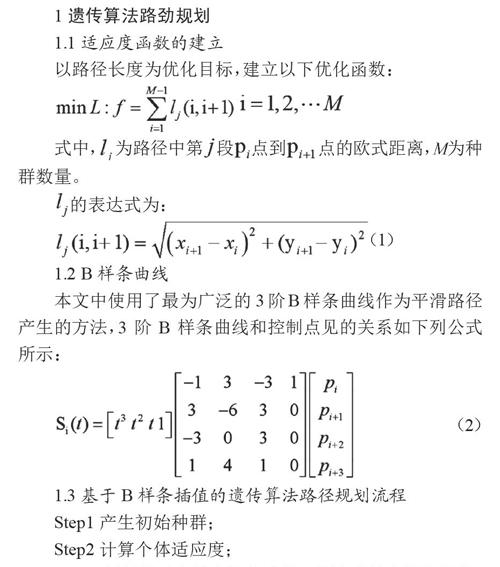
1遗传算法路劲规划
1.1适应度函数的建立
以路径长度为优化目标,建立以下优化函数:
式中,为路径中第段点到点的欧式距离,为种群数量。
的表达式为:
(1)
1.2 B样条曲线
本文中使用了最为广泛的3 阶B 样条曲线作为平滑路径产生的方法,3 阶 B 样条曲线和控制点见的关系如下列公式所示:
(2)
1.3基于B样条插值的遗传算法路径规划流程
Step1产生初始种群;
Step2 计算个体适应度;
Step3 判断是否為最大迭代次数,若达到最大迭代次数,则输出当前解,当前解即为最优解;若种群当前代小于最大迭代次数,则对该种群进行一系列的遗传操作,选择、交叉、变异等,返回第2步;
Step4 达到最大迭代次数,B样条优化路径点,输出最佳路径,算法结束。
2仿真分析
采用 Matlab 仿真软件,对上述算法进行了仿真测试。算法参数设置为:种群规模 popsize = 60,遗传代数 t =50;交叉概率 = 0.9,概率 = 0.2,所得的仿真结果如下图所示。粗平滑曲线即为通过计算所获得的最优机器人路径。黑折线为传统遗传算法所得路径规划结果,从图中可以看出,本文所提出的算法路径更平滑,更能减少机器人磨损。
3结论
本文应用遗传算法进行机器人路径规划,设计了B样条优化,能够使产生的路径结点连续,平滑,仿真实验表明,相比传统优化算法,减少了机器人的磨损和转弯打滑产生的误差。
参考文献
[1] 张毅,代恩灿,罗元.基于改进遗传算法的移动机器人路径规划[J].计算机测量与控制,2016,24(01):313-316.
[2] 葛勇,牛成水,杜美云等.基于改进遗传算法的移动机器人路径规划的研究[J].青海大学学报,2018,156(02):37-44.
猜你喜欢
测控技术(2018年2期)2018-12-09
石油地球物理勘探(2017年2期)2017-11-23
中央民族大学学报(自然科学版)(2017年1期)2017-06-11
统计与决策(2017年2期)2017-03-20
中国新通信(2016年22期)2017-01-13
湖南城市学院学报(自然科学版)(2016年2期)2016-12-01
智能系统学报(2015年4期)2015-12-27