
弹间协同制导自组网数据链集成设计方法*
2019-12-20 08:53蔡文龙张烁张伟林金永张春侠董文杰
现代防御技术 2019年6期
蔡文龙,张烁,张伟,林金永,张春侠,董文杰
(1.宇航智能控制技术国家级重点实验室,北京 100854;2.北京航天自动控制研究所,北京 100854;3.中国人民解放军92493部队,辽宁 葫芦岛 125001)
0 引言
未来战争是以网络为中心的战争,战场内外的不同武器装备通过网络联系在一起,构成陆、海、空、天、网电一体化的综合战场环境和作战体系[1-3]。现有导弹面临信息保障、抗干扰、突防等作战困境,利用体系化对抗的思想,把相同功能和不同功能的导弹进行编队和分工,通过相互协作,进行分布式探测和信息共享,以及多弹密切配合对目标进行协同攻击,实现提高整体突防的目的,达到提高抗干扰能力和对目标多方向的精确打击能力的效果,将成为在体系对抗条件下的必然选择和发展方向[4-5]。
战争形态的变化不但对武器装备信息化、作战保障信息化提出了要求,而且对建设适应信息化战争要求的一体化信息系统提出了迫切要求[6]。在世界范围内,面向任务的作战飞机、导弹等跨平台的自组网和卫星辅助组网是信息化作战的重要发展趋势,发达国家的作战飞机、无人机和部分导弹武器系统甚至已经实现了实时或准实时的宽带组网[7]。空基/天基平台组网不仅传输实时的指挥、控制和战场态势,而且还可传输语音、图像甚至视频等海量信息[8]。弹间协同组网的典型例子是俄罗斯的“花岗岩”系列导弹,其采用独有的“编队攻击”方式,指挥弹将目标数据通过弹间无线通信网传输给在低空飞行的其他导弹,以保持低空导弹的隐蔽性,共同实现对目标的协同打击[9-11]。美军“战斧Block4多任务导弹”已实现星弹双向数据链通信,其弹上终端可实时回传战场评估数据,并接收从卫星、预警机、无人机和岸基通讯设备上发的重新确定打击目标命令和数据,在飞行过程中迅速改变方向,攻击新的目标[12]。
协同制导控制系统扩展弹间自组网数据链功能,可以有效解决协同信息的动态交互与协同作战任务的闭环控制问题[13-15],具备以下优势:①可减少附加设备数量,减小对平台的负担并降低成本;②可减少信息流转回路与延时,以及系统间的数据交互,降低系统复杂度;③可实时利用控制系统导航、制导、控制信息,建立与飞行器间的相对位置、速度以及自身的姿态信息紧耦合的定向通信链路,保证系统性能,并提升信息安全性;④可实现导弹自组织网络的实时飞行控制,完成多任务多目标在线动态分配、多弹协同目标实时定位、精确目标指示、协同抗干扰、协同攻击等作战任务。
本文研究了弹间自组网数据链集成设计的方法,包括协同制导控制系统组成及信息流向、自组网数据链系统方案、产品架构以及飞行试验验证等,可为弹群实现体系化协同攻击提供基础信息保障。
1 协同制导控制系统组成与信息流向
1.1 协同制导控制系统组成
协同制导控制系统组成如图1所示,它由传统飞行控制系统以及弹间自组网数据链2部分组成。传统飞行控制系统一般由导航设备、目标敏感器、弹上信息处理与控制中心、执行机构等设备以及控制系统软件等组成,用来控制独立导弹的飞行轨迹和运动姿态。弹间自组网数据链一般由基于无线自组网架构的自组网数据链弹载通信终端、自组网协议栈等组成。
1.2 协同制导控制系统信息流
协同制导信息可分为2类:一类是导弹自主信息,包括导弹自行获取、产生、处理、应用的导航、制导、控制信息,指令信息,健康状态信息等;另一类是导弹协同信息,包括遥控指令、目标属性(图像、位置、数量、危险等级等)、威胁环境、节点身份、节点定位及网络连通等信息。
导弹协同制导控制系统信息流如图2所示,导弹协同制导控制系统与外部节点组成网络。其中,导弹自主信息通过内部总线依次经过弹上信息处理与控制中心、自组网控制器、终端处理机和收发信机,再由天线组合发送给外部节点。
导弹协同信息通过天线组合接收,再依次通过收发信机、终端处理机传输给自组网控制器,由自组网控制器判断从天线组合接收到的信息是否是中转数据,若是中转数据则回传到天线组合转发至其他节点,若不是中转数据则通过总线传输给弹上信息处理与控制中心进行信息集成。
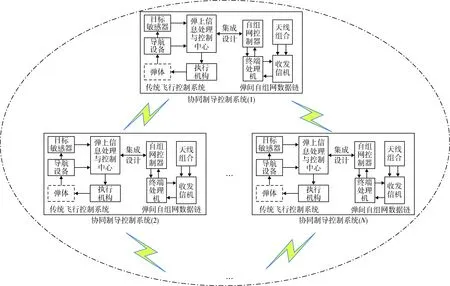
图1 协同制导控制系统组成Fig.1 System composition of missile cooperative guidance system

图2 导弹协同制导控制系统信息流向Fig.2 Information flow of missile cooperative guidance system
2 弹间自组网数据链集成方案
2.1 数据链路
弹间自组网数据链应包含弹间通信链路,可兼备弹-地通信链路、弹-星或弹-机通信链路等一类或多类,能够实现快速组网、可靠通信,如图3所示。各类链路应至少具备如下功能:
(1) 弹间通信链路,即不同导弹之间的通信链路,用于实现各协同作战导弹间的运动学状态、功能状态、目标信息等数据的交互、融合、共享;
(2) 通过弹、星、机、舰、地等中继节点,建立弹间通信链路,实现数据交互、融合、共享;

图3 弹间自组网数据链路组成Fig.3 Communication links of ad-hoc network data link system of missile
(3) 通过弹、星、机、舰、地等中间节点,或直接与指控中心之间建立通信链路,用于接收控制信息。
2.2 总体方案
(1) 组网方案
具备弹间自组网功能,能形成一个快速组网、自主式、高可靠、强实时性的通信系统;一般可采用射频综合方法,充分利用弹上现有的其他无线通信设备实现通信功能,同时兼顾信息传输速率与天线口面大小等使用需求,选用合适的天线类型,如定向天线或全向天线。
(2) 网络架构
网络架构应包含网关节点及底层节点,满足快速组网、自主式、高可靠、强实时性需求,多个节点在运动过程中依据特定协议自主组网,能自主形成功能节点,实现分层的网络结构,并进行分层或分布式管理;网络具备动态性,允许网络的拓扑结构实时变化,节点能够不断地加入或退出;多个网络能依据特定的协议进行融合,形成一个多层网络(如弹间-弹星-弹地网络);网络协议架构采用物理层、数据链路层、网络层以及应用层等四层结构。
(3) 网络规划
网络规划考虑网络规模、拓扑结构、节点角色分配、频谱分配等内容。
(4) 组网接入机制
根据组网吞吐量、时延及网络服务质量等要求,选择合适的组网接入机制,如为保证公平性采用基于调度的组网接入机制,为保证时延采用基于竞争优先级的组网接入机制等。
(5) 通信体制
自组网数据链通信终端需要按照使用要求选择合适的双工体制,如全双工与半双工体制,如果收发采用一个频段,一般采用TDD半双工体制,如果收发频段分开,可以采用FDD全双工体制。
(6) 时频统一机制
按照任务要求完成时频统一机制的设计,如采用授时、网络自同步等。
(7) 功能与性能
自组网数据链方案还需考虑网络数据交换、网关、数据业务类型以及抗毁性、抗干扰、抗截获等功能设计,以及组网工作时长、网络服务质量、通信距离、通信工作频段和带宽、通信数据率以及系统传输链路等性能设计。
2.3 弹载通信终端硬件方案
弹间自组网数据链弹载通信终端包括自组网控制器、终端处理机、收发信机以及天线组合等模块(图4),实现导弹协同制导信息的收发与处理,各模块功能如下:
(1) 自组网控制器一般包含网络协议模块和信息预处理模块等组成,主要实现应用层、网络层以及链路层协议等功能,应具备高速实时网络建立、维护与控制能力;
(2) 终端处理机主要实现物理层协议功能,一般包括由调制与解调、编码与解码、扩频与解扩、同步等;
(3) 收发信机主要实现上下变频功能;
(4) 天线组合主要实现无线信号发送与接收功能,一般包括天线、天线控制器、功放与低噪放等。
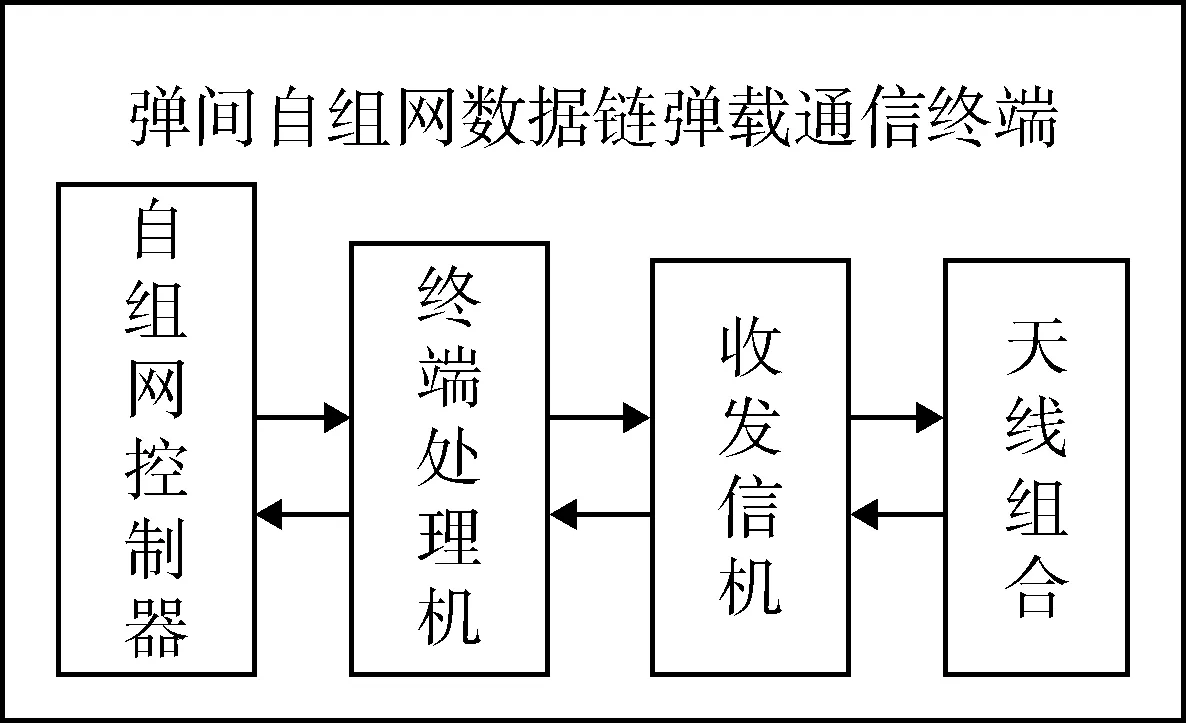
图4 弹间自组网数据链通信终端组成Fig.4 Composition of communication terminal
自组网控制器一般采用数字信号处理器(DSP)+可编程逻辑器件(FPGA)的硬件架构;终端处理机由信号处理软件与相应硬件资源组成,采用可编程逻辑器件(FPGA)硬件平台等进行设计,用于承载信号处理软件的快速有效运行;信号处理软件完成基带信号的计算处理,一般包含加扰解扰、信道编译码、组帧和帧同步、扩频和解扩、调制解调等模块;收发信机主要包含上下变频模块、频综等射频功能模块;天线组合由天线、天线控制器、功放与低噪放等组成。天线组合的设计考虑了天线形式、天线体积、波束覆盖范围、带宽、驻波比、极化方式(如圆极化还需考虑轴比)、波束指向及误差、天线增益、等效各向同性辐射功率(EIRP)、品质因数(G/T)、接收功率等因素。
2.4 协议栈与算法
自组网协议栈一般包括4个层次:应用层、网络层、链路层和物理层。协议层次安排及相互间关系如图5所示。

图5 协议栈模型Fig.5 The communication protocol stack
(1) 应用层
应用层根据面向协同飞行控制的体系协同信息应用需求,设计执行飞行时序流程、基于实时嵌入式系统多任务调度机制的协议模型,设计指控指令、目标图像、协同制导信息的交换与融合以及波束指向及互锁等算法。
(2) 网络层
网络层包括网络管理与网络路由等功能。网络管理主要根据入/退网时间、网络重构时间、时延等要求,设计网络建立/关闭、网络维护(重新配置、新节点的进入、节点的退出等)等算法;网络路由主要设计采用的路由策略与算法等,为源节点数据包的发送建立一条或多条到达目的节点的最优路径。
(3) 链路层
链路层主要实现介质访问控制与逻辑链路控制等功能。介质访问控制根据系统连通性、资源分配、吞吐量及时延等要求,设计竞争式、预约式或混合式的媒体访问控制方法,将有限的资源分配给多个用户,从而使得在众多用户之间实现公平、有效地共享有限的带宽资源;实现各用户间良好的连通性,获得尽可能高的系统吞吐量、以及尽可能低的系统时延。逻辑链路控制一般包括数据流的复用、数据帧的检测、分组的确认、优先级排队、差错控制和流量控制等算法设计。
(4) 物理层
物理层主要包括信息的编码与译码、组帧与帧同步、扩(跳)频与解扩(跳)、调制与解调、加扰与解扰等。需根据数据长度、数据速率和业务类型等要求,考虑编码效率、编码增益、编码时延、编/译码器的复杂度、信道特性、干扰和噪声等因素,选择合适的编译码方式;根据数据率、时延、多普勒频移及变化率以及业务需求等要求设计组帧方式和帧同步方法;根据需求与约束采用合适的扩频体制,考虑处理增益和抗干扰容限等参数;考虑频谱效率、功率效率、误码率、带宽等参数,综合选取合适的调制解调方式;如有特殊需求,根据具体的情况设计加扰解扰控制器,一般采用伪随机序列进行随机化处理,根据加扰和解扰方案的需求可采用不同的伪随机序列。
3 试验验证
3.1 内场测试
(1) 通信终端算法验证试验
通信终端算法验证试验包括捕获、跟踪、同步算法,高效编译码,网络管理、网络路由,介质访问控制、逻辑链路控制等核心算法正确性及有效性的测试与验证。
(2) 有线对接试验
通过有线对接的形式,验证物理层、链路层、网络层、应用层协议的正确性,以及数据率、误码率、动态组网等性能。
(3) 抗干扰试验
通过注入或辐射各种样式的干扰,验证弹间自组网数据链系统的抗干扰能力。
(4) 指标满足性测试
按照系统要求构建综合工作环境,对系统性能进行测试。一般包括波形、增益、辐射功率、轴比、驻波比、多普勒频偏适应范围、接收灵敏度、动态范围、噪声系数等参数的性能测试,验证指标满足性。
(5) 微波暗室性能测试
在暗室的环境下,对自组网物理层、链路层协议以及数据链通信终端的功能和性能进行测试,验证弹间自组网数据链系统的极限工作情况和理想条件下链路指标满足性。
3.2 外场测试
(1) 拉距试验和动中通试验
在外场多径无遮挡或移动通信条件下,验证自组网数据链系统的工作可靠性以及通信能力,包括链路性能指标及余量等。
(2) 挂飞试验
在飞机挂飞动态工作环境下,验证自组网数据链系统工作可靠性以及通信能力。
4 结束语
本文研究了弹间自组网数据链集成设计的方法,已在型号弹间自组网数据链设计与试验中得到验证,可有效指导导弹协同制导信息组网及弹间自组网数据链设计,为弹群体系化协同攻击提供基础信息保障。
猜你喜欢
火力与指挥控制(2022年8期)2022-09-16
网络安全与数据管理(2022年6期)2022-07-13
北京航空航天大学学报(2022年5期)2022-06-06
北京航空航天大学学报(2021年4期)2021-11-24
移动通信(2021年5期)2021-10-25
北京航空航天大学学报(2021年6期)2021-07-20
军民两用技术与产品(2021年10期)2021-03-16
中国新技术新产品(2020年19期)2020-12-25
北京航空航天大学学报(2019年9期)2019-10-26
当代陕西(2019年7期)2019-04-25
