
一种导引头性能可视化评估方法
2019-12-13 02:13胡小丽张伟光张思琪张三喜张玉伦王晓华
应用光学 2019年6期
胡小丽,张伟光,张思琪,张三喜,张玉伦,王晓华
(1.中国华阴兵器试验中心,陕西 华阴 714200;2.西安现代控制技术研究所,陕西 西安710065)
引言
导引头的性能对制导武器来说至关重要,在研制过程中需要对其性能进行考核和评估。目前,常见的有激光制导、图像制导、微波制导等。激光制导、微波制导的导引头由于不具备可视化功能,在实际环境中进行性能考核时,导引头是否成功截获指定目标、截获目标后的稳定跟踪过程是否正常以及在稳定跟踪过程中出现的问题都不易得到及时、准确的定位和分析。室内仿真性能评估方法[1-2]与真实环境差异较大,室外挂飞方法[3]代价大,且不能提供姿态运动;文献[4-8]所述方法不普适于激光、微波制导等导引头,在跟踪异常时难以得到及时、准确的反馈。
文中设计的可视化随动导引头运动方法可有效解决上述问题,利用可视化系统可将导引头搜索、跟踪目标的过程清晰成像,直观显示导引头的整个工作过程,同时利用图像跟踪系统和图像存储系统保存关键性能参数,试验完成后对导引头的跟踪性能进行处理,对导引头的性能参数进行分析和评估。
1 可视化系统设计
该系统主要用于伴随导引头运动,获取可视化图像和目标实时脱靶量,用于开展对导引头跟踪性能、抗干扰性能的评估。
系统主要由导引头、电视成像分系统、伺服转台分系统、图像存储器、图像跟踪器、显示控制分系统及辅助设备等部分组成。其中电视成像分系统、图像跟踪器、图像存储器在结构设计时组成在一起,使用时固定在转台分系统的俯仰轴上,作为转台的负载,可完成方位和俯仰两个方向的运动。
转台分系统和导引头通过固定装置固定在系统的安装装置上,它们与显示控制分系统通过电缆连接,实现数据交互。系统结构布局如图1所示。
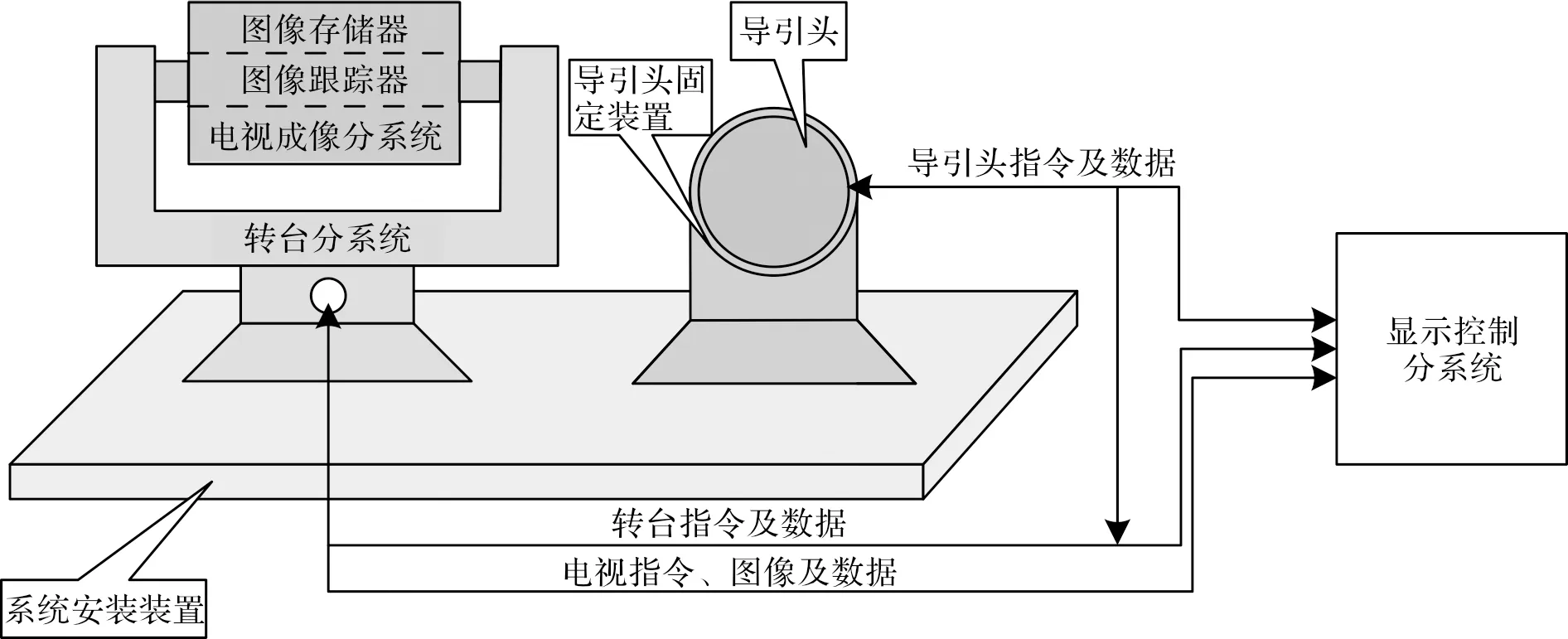
图1 系统结构布局Fig.1 System structure layout
2 试验场景设置
以搭载可见光系统的二维跟踪转台的光电回转中心为原点O建立三维坐标系,设定转台初始装订有效时刻为零时刻,此时所在的可见光光轴指向为X轴方向,以竖直向上的方向为Y轴方向,按照右手系确定Z轴方向。靶标可按照静态或动态状态设定,靶车形心为(X0,Y0,Z0)。为后续评估时间的同步性,在靶标及二维跟踪转台上均加装GPS信号以实现定位定时功能。为实现有效评估,可见光视场须与导引头视场实现有效匹配,初始跟踪转台在最远作用距离以外,以一定速度在轨道上相对于靶车由远及近行进,在行进过程中对目标施加遮蔽或干扰项,根据可视化图像及脱靶量、转台输出伺服数据以及导引头输出数据,对导引头性能进行定量观察及定性分析。
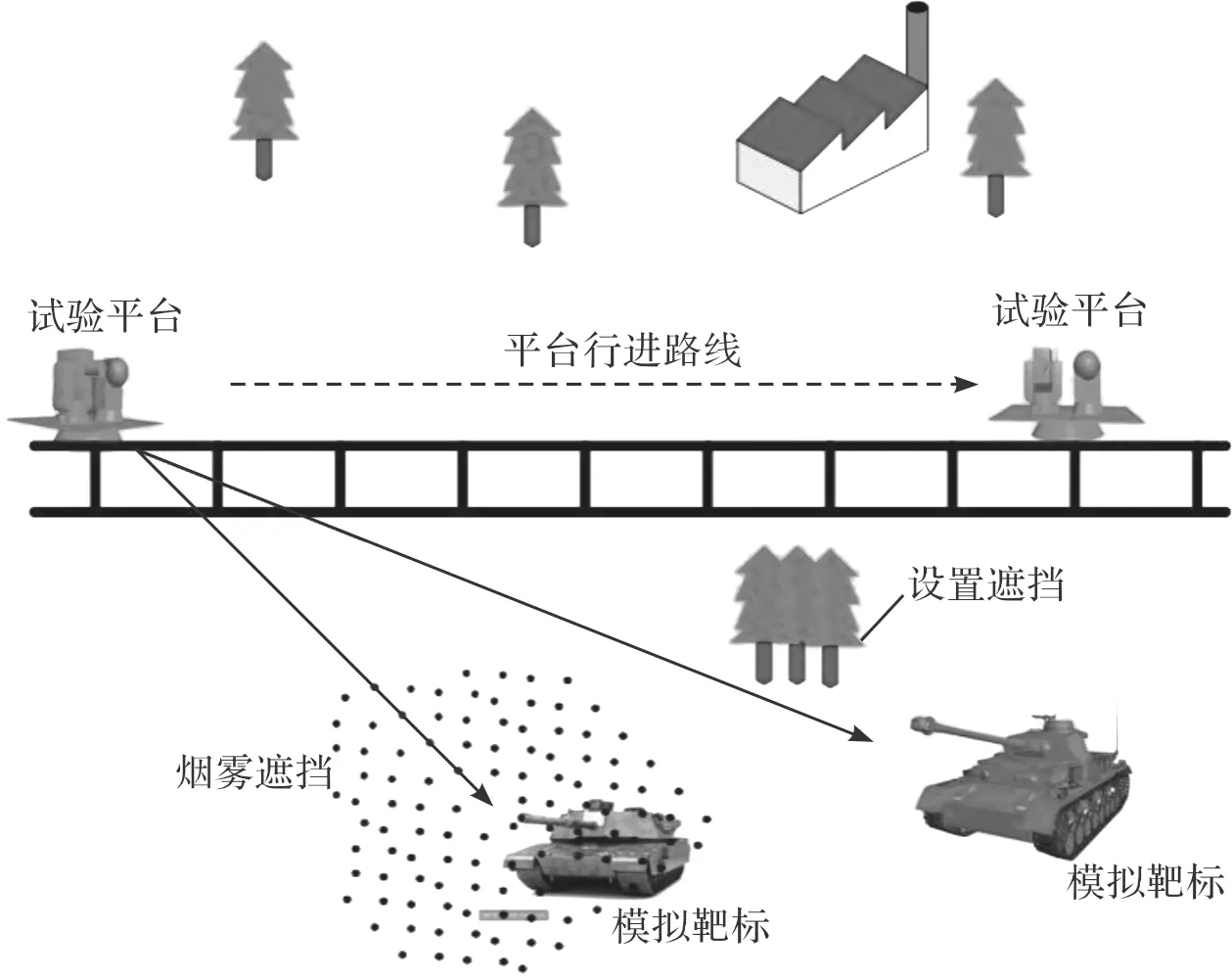
图2 试验场景设置Fig.2 Test scenario setting
3 可视化评估方法
无干扰状态下通过有限的几个特征点,通过可视化系统分析导引头输出数据正确性;同步分析导引头与可视化图像光轴的状态关联性。
根据GPS输出的转台及靶车位置,判断导引头输出数据是否正常;另外为后续可见光与导引头运动状况关联奠定基础。导引头输出数据验证主要包括框架角/视线角/视线角速度。
已知条件:可见光镜头回转中心坐标(Xc,Yc,Zc) 、由GPS位置推断出导引头的实时位置(XS,YS,ZS) 、机械轴中心坐标(Xd,Yd,Zd),可见光光轴指向角(A,E)、可见光图像及脱靶量(Δx, Δy)、导引头视线角 (qA,qE)、视线角速度(wA,wE)以及框架角(AS,ES)。
待求证:导引头输出信息包括:框架角/视线角及视线角速度是否正确可靠。
1) 视线角及视线角速度输出验证
以GPS测得的靶车中心及机械轴支点坐标,即为弹目连线;而本设计方案中,如图1所示,导引头无支撑转台,故运动过程中,弹轴不动而导引头运动,故弹轴轴线可以设置为初始零度,视线角即为弹目连线,结果如图3所示。而视线角速度即为视线角对时间的差分。
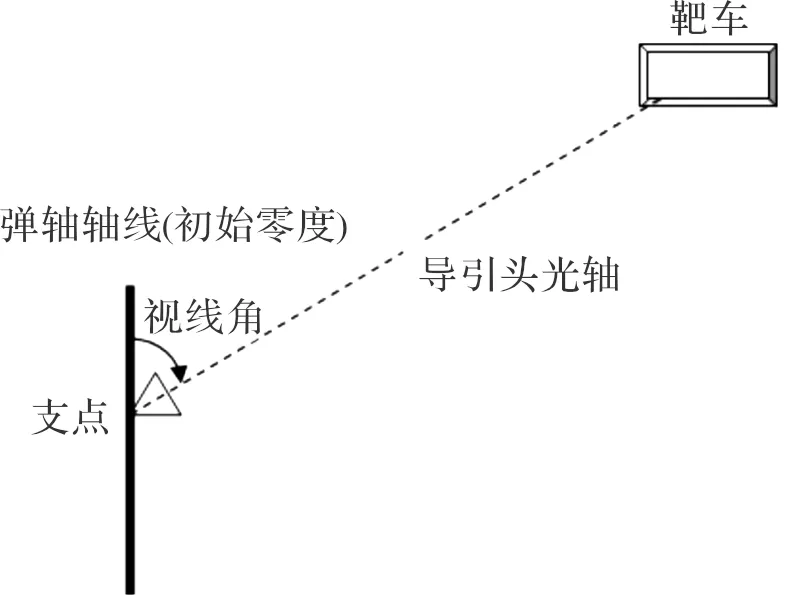
图3 视线角示意图Fig.3 Diagram of line-of-sight
a) 由GPS测得坐标推算弹目连线
由机械轴中心坐标(Xd,Yd,Zd)和靶车形心位置(X0,Y0,Z0),可以计算出导引头至目标连线(方位tA(t)和俯仰角tE(t))的指向。
(1)
据上面分析,弹轴即为初始零度,故上一步的弹目连线即为导引头输出的视线角,因导引头输出数据精度约为0.1°~0.2°,则下面等式允许相应程度的误差存在。另外,考虑导引头传输延迟约为50 ms,故导引头当前视线角 (qA,qE)对应50 ms以前的状态数据。
(2)
b)对第一步获取的视线角进行时间差分,与导引头输出的视线角速度(WA,WE)相等。
(3)
2) 导引头输出框架角验证

(4)
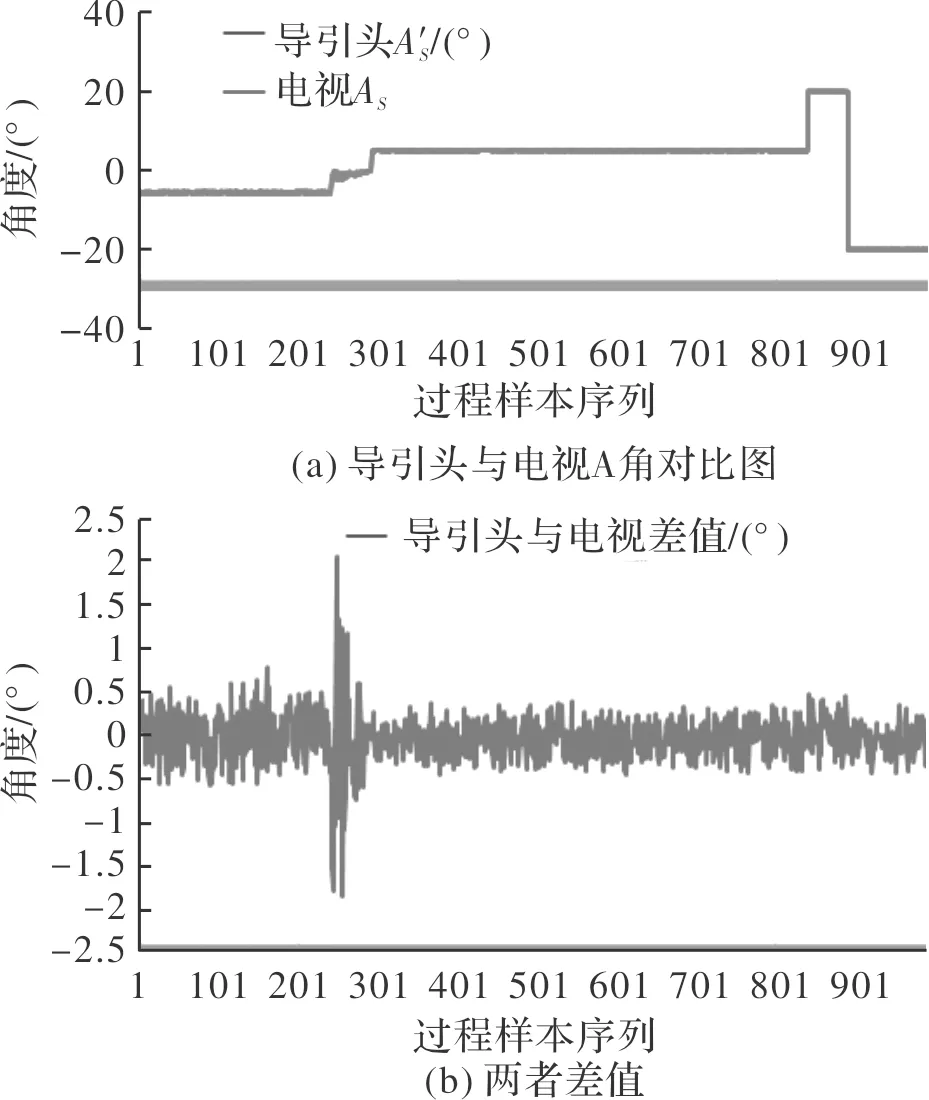
图4 导引头与电视A角对比图Fig.4 A-angle contrast diagram between seeker and TV
图4所示为某型毫米波导引头从空闲转搜索再转跟踪,后至结束的过程,从图4所示,两者运动趋势完全一致,除了过渡阶段出现个别大值外,差值基本在0.5°以内,折算传输延迟及导引头自身输出精度考虑,可见光光轴可以反映导引头光轴的运动状态。干扰状况下综合导引头自身输出及可视化图像同步分析,并进行数据可视化显示。

图5 可视系统记录的激光导引头跟踪目标和干扰目标的过程Fig.5 Tracking and jamming processof laser seeker recorded by visual system
用可视化系统对某型激光导引头的抗干扰性能进行测试,从导引头输出框架角图6(a)可分析出,导引头初始处于空闲状态,后进入搜索状态,维持某一数值并基本维持该状态,后又进入搜索状态,再次维持某一状态,最后至结束。结合可视化电视图像及脱靶量分析,明显可以看出导引头首先处于零时位置,后发现激光光斑目标后,快速转至目标处,并维持状态;后视场内出现干扰激光光斑,图像开始出现不稳定状态,先在图像中心小幅震荡,后迅速转自干扰激光光斑处;从图6(b)脱靶量分析同步印证前面分析结果,初始零时无脱靶量输出,后在转向目标过程中,逐步锁定目标,脱靶量由大变小,后几乎在零值附近震荡,至基本趋向稳定;之后干扰激光光斑出现,脱靶量由小幅震荡变为大幅抖动,后进入搜索状态,无脱靶量输出,最后转自干扰目标过程中,脱靶量又由大变小,最后趋向零值。
通过电视脱靶量分析,对导引头跟踪或抗干扰性能进行客观综合评估。
通过上述分析可知,可见光能很好地反映导引头的运动状况,故可见光视角能较好地匹配导引头的视角,通过统计分析可见光图像的脱靶量,即可反映出导引头跟踪目标的稳定性和可靠性。为达到客观综合评判跟踪结果,可采用动态误差谱[9]方法,广泛融合调和平均、几何平均、算术平均和广泛使用的均方根误差,达到评估结果既不受小误差值主导,又不受大误差值主导的平衡结果。该方法尤其适用于多导引头竞标试验性能比对。
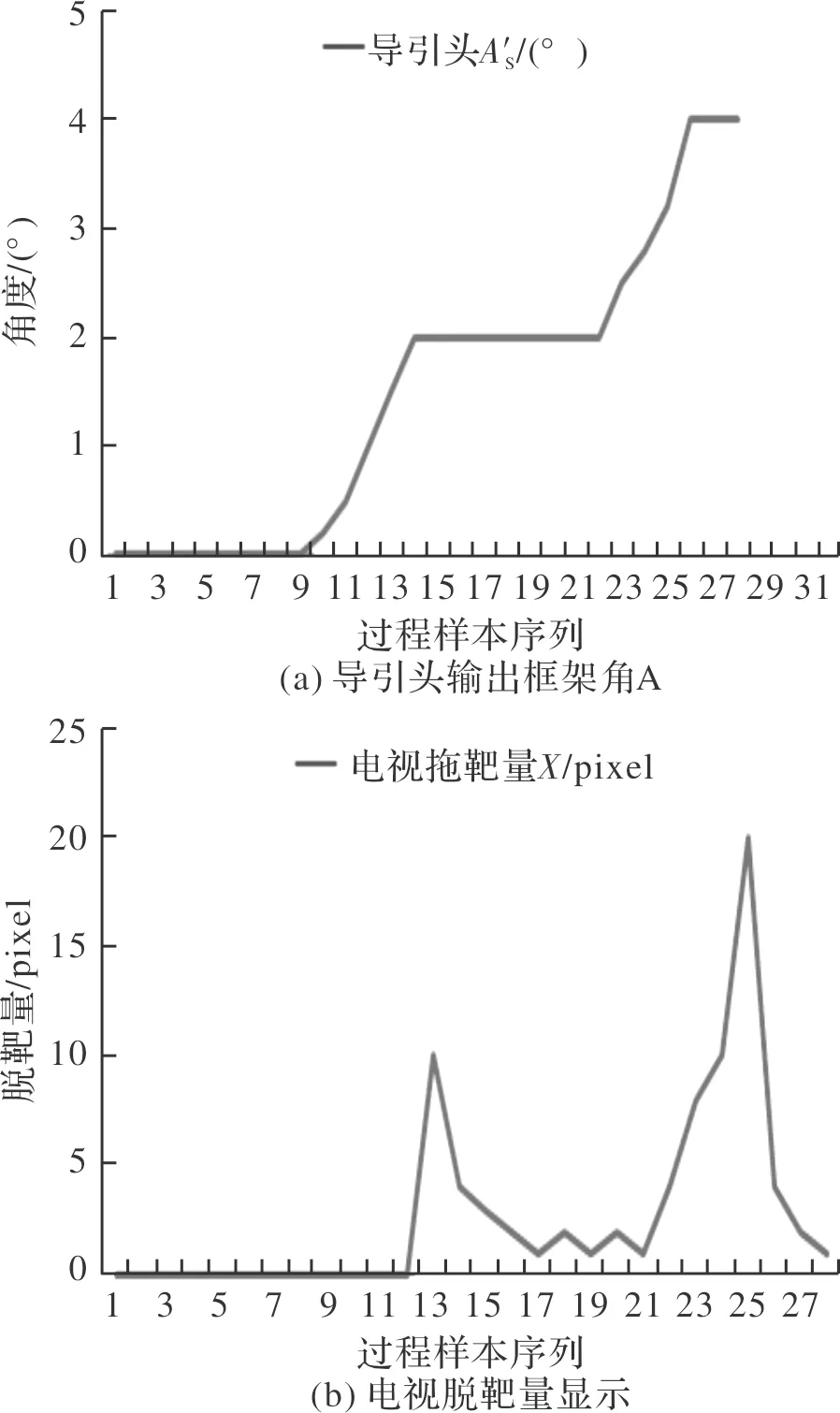
图6 干扰过程导引头输出与可见光电视脱靶量输出图Fig.6 Seeker output and visible TV miss distance output charts
4 结论
通过可视系统同步随动导引头运动的评估方法,克服了室内仿真不真实及室外挂飞代价高,且不能提供姿态运动的不足,将导引头跟踪,抗干扰等场景直观可视,所得图像及相关数据可用于导引头性能定性及定量评估,为导引头性能评估提供了一种比较有效的中间手段。
猜你喜欢
特区文学·诗(2021年6期)2021-12-22
金色少年(奇趣科普)(2017年11期)2017-11-28
中学生数理化·高一版(2017年3期)2017-07-08
制导与引信(2016年3期)2016-03-20
火控雷达技术(2016年1期)2016-02-06
中国铁道科学(2015年4期)2015-06-21
当代贵州(2015年19期)2015-06-13
弹箭与制导学报(2015年1期)2015-03-11
弹箭与制导学报(2015年1期)2015-03-11
岷峨诗稿(2014年3期)2014-11-15
