
驾驶员脑力负荷计算系统的设计与实现*
2019-12-06 02:46裴叶青金晓萍宋正河刘龙灿
汽车工程 2019年11期
裴叶青,金晓萍,宋正河,刘龙灿
(1.中国农业大学工学院,北京 100083; 2.现代农业装备优化设计北京市重点实验室,北京 100083)
前言
随着人民生活水平的提高,汽车的保有量日益增加,同时,汽车驾驶所引发的安全问题越来越受到重视。由驾驶员因素引起的交通事故中,一个重要的原因就是驾驶员脑力负荷过高,产生驾驶疲劳,造成驾驶员对车速与周围环境的判断出错、反应力低下和注意力降低等,这些都可能引发交通事故。
脑力负荷理论是由教育心理学家 Sweller[1]和Paas[2]等人于20世纪80年代提出的一种理论。脑力负荷通常是指在一个特定的作业时间内施加于个体认知系统的心理活动总量[1,3]。目前关于脑力负荷的理论模型已有不少专家学者进行研究。Sheridan等人[4]主要从“控制”的角度解释脑力负荷,认为脑力负荷来源于作业要求、绩效标准、情绪压力、系统总绩效、对作业者的能耗要求和信息加工要求6个方面。其中,信息加工负荷和情绪负荷属于心理负荷范畴。Kahneman等人[5]提出了单资源模型,该模型指出:注意是一种容量有限的通用资源,人们运用这一资源进行各种作业。在单资源模型的基础上,发展出了一些多资源模型。其中,Wickens[6]提出的三维度资源系统得到广泛认可,此模型将注意资源划分为3个维度:输入通道、加工阶段和加工/输出方式。多资源理论较客观地反映了脑力负荷各因素的作用方式与过程,已成为脑力负荷的主要理论模型,成为现今脑力负荷研究的重要理论基础。
目前脑力负荷的评估方法主要有主任务评估法、次任务测量法、生理测量法和主观评价法等4种[7]。各方法均有优点与不足,目前尚未形成较为统一的脑力负荷测评体系。评定方法和指标的选取须根据研究对象的不同进行具体分析。但研究者普遍认为单一种类的指标很难充分反映完成任务所需的脑力负荷,因此有必要采用多种指标来反映操作者的脑力负荷水平。
目前对于脑力负荷状态的在线监测和自适应自动化的研究是热点,研究者采用目前最新的技术从大脑活动[8]、眼动[9]、血压[10]等多个方面实现脑力负荷的实时监测,以期最终实现自适应的自动化,但没有一个单一的方法可准确测量脑力负荷,因此须对多种测量指标进行对比选择,同时由于生理设备的干扰性,实时诊断面临一定的困难,导致自适应自动化准确性不足。此外,对于脑力负荷等级的精确划分也缺乏一个统一的理论。
本文中对脑力负荷进行了定量分析,分析结果反映了驾驶员驾驶时的信息处理瓶颈所在,这为今后道路安全设计指出了方向。其次,本研究的脑力负荷计算系统可用于人机系统的性能预测。在车辆产品研发与更新换代阶段,通过对不同驾驶任务的分析与负荷计算,可发现设计中的不合理成分,对产品的开发提供指导。再次,研究中使用的脑力负荷计算模型直接反映驾驶负荷。目前在驾驶负荷的研究上很多都是通过心理生理指标来反映的,测量结果由于驾驶员生理或心理的差别而存在差异。而本研究以驾驶任务为研究对象,直接将操作行为与负荷量联系起来,能更客观地反映驾驶任务的负荷需求。本文中主要解决的问题是对驾驶员执行某一驾驶任务时的脑力负荷值进行定量计算。从脑力负荷的定义来看,工作负荷与任务执行时对操作者施加的信息量密切相关。因此,本文以任务的信息需求量作为衡量工作负荷的标准,整理出一种较为客观的针对操作任务本身的脑力负荷评测方法,形成脑力负荷计算系统,以此为基础实现对“汽车绿灯路口直行”任务脑力负荷的计算,并通过实验对此系统进行验证。
1 脑力负荷计算模型
1.1 行为要素评定量表
多资源理论表明,人的信息处理通常分为视觉、听觉、认知和动作4部分,使用这4个处理源下的所有行为要素可表示出任何操作行为[11]。根据实验结果将不同行为要素的资源使用情况进行打分,形成的行为要素评定量表[12-13]可对任何行为的脑力负荷资源占用情况进行打分。本文中采用McCracken等人制作的7分制量表[14]作为脑力负荷的量化标准。对于任何任务皆可将其分解为若干子任务,从而形成任务分析表,然后使用行为要素评定量表对各个子任务的负荷值进行确定,从而将具体任务与脑力负荷值联系起来。
1.2 脑力负荷组成
脑力负荷是一个十分复杂的概念,在将一个驾驶任务划分为子任务序列之后,还须进行繁杂的计算才能转化到最终脑力负荷上。很多研究人员试图将这一过程模型化,其中美国陆军研究所(ARL)提出的计算模型[15]较为实用,ARL将其用于坦克操作任务的负荷计算,证明了此模型的可用性。在ARL负荷计算模型中,驾驶员脑力负荷大致由单一子任务引起的负荷和多任务并行引起的附加负荷两部分组成。
1.2.1 单一子任务负荷
驾驶任务的每个子任务都产生一定的脑力负荷,每增加一个子任务,脑力负荷必定增加。因此,最基本的负荷部分即为各个子任务的负荷值之和,记为

式中:i为信息处理源;t为子任务;at,i为执行子任务t时在信息处理源i上产生的负荷值。
1.2.2 附加负荷
除了各子任务负荷值之和外,子任务的并行还会产生额外的脑力负荷,以信息处理源为区分单位。任意两个处理源(包括同信息处理源和不同信息处理源)之间的子任务都会产生相互影响,进而产生附加负荷,执行并行子任务时的困难程度用冲突值来表示。同信息处理源的子任务同时进行时,所需的脑力负荷会明显增加;不同信息处理源的子任务同时进行时,脑力负荷也会增加,但增加的程度与同源相比明显降低。本文中通过询问专家的方式对各信息处理源冲突大小进行排序,参照文献[16]进行赋值,得到的信息处理源冲突值表如表1所示。
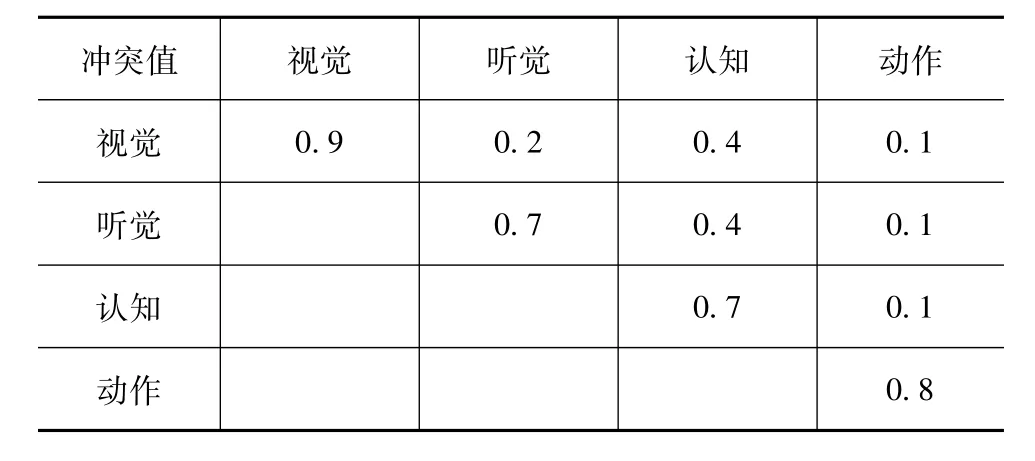
表1 信息处理源冲突值表
对于同信息处理源下的多个子任务,对脑力负荷值的贡献量为

式中:i为占用的信息处理源;t为子任务;at,i为执行子任务t时在信息处理源i上产生的负荷值;Ci,i为信息处理源i的内部冲突值。
对于不同信息处理源下的多个子任务,对脑力负荷值的贡献量为
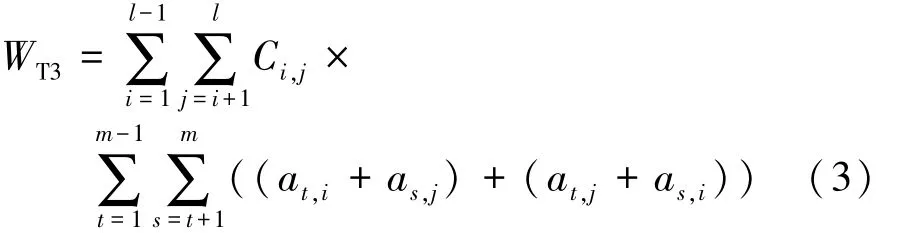
式中:i,j为占用的信息处理源;t为子任务;at,i为执行子任务t时在信息处理源i上产生的负荷值;Ci,j为信息处理源i和j之间的冲突值。
1.3 最终模型
基于以上分析,脑力负荷的总计算模型为
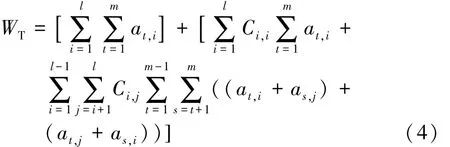
式(4)满足如下应用条件:
(1)如果 at,i=0或者 as,j=0,则 at,i+as,j=0;
(2)如果 at,j=0或者 as,i=0,则 at,j+as,i=0;
(3)如果 nT,i≤1,则 Ci,i=0,其中 nT,i为同信息处理源个数。
2 系统设计
2.1 功能需求分析
本系统的主要功能是对典型汽车驾驶任务的脑力负荷进行计算。对于用户输入的任务信息,系统须对子任务进行识别,对子任务时间进行处理,获取子任务并行情况,并采用计算模型进行运算。
2.2 模块分析
针对系统的功能需求,将其基本结构划分为信息读取、时间处理、并行分析和负荷计算4个模块。
2.2.1 信息读取模块
在利用系统进行计算之前,用户须按表2将驾驶任务划分为若干子任务,并将子任务序号作为参数输入系统。为获取用户输入的子任务信息,系统须利用Matlab的excel表格读取功能对表2中所示所有子任务进行读取,读取内容为子任务序号、子任务负荷值和子任务所属信息处理源。系统收到输入的序号时就能将该序号下的子任务的负荷值和所属信息处理源进行关联。
2.2.2 时间处理模块
时间信息主要指任务的开始时刻与结束时刻。对于一个特定的驾驶任务,让不同的驾驶员来执行,或者让同一个驾驶员多次执行,其子任务的时间信息可能不同,但应服从一定的分布关系。因为子任务的时间信息会受到许多因素的影响,而这些因素的影响都很小,因此本文中对子任务的开始时刻和结束时刻均进行正态随机处理。
2.2.3 并行分析模块
时间处理之后,任务序列中每个子任务的开始和结束时刻就确定了。将所有开始或结束时刻称为时间节点,在两个相邻的时间节点之间子任务的类型是不变的,每过一个节点子任务状态发生一次变化。因此,仅须考虑节点处子任务的并行情况即可得到整个任务时长内各个阶段的并行情况。
在一个任务中,定义n为时间节点个数,定义具有n个cell的变量,每个cell都作为该时间节点下子任务的存储矩阵。对所有子任务的开始时刻和结束时刻一一进行检查,当发现某个子任务的开始时刻与第i个时间节点一致时,就将该子任务序号存入第i个cell的矩阵下;当发现某个子任务的结束时刻与第j个时间节点一致时,就将该子任务序号从第j个cell的矩阵中去掉。于是,每一个cell下的矩阵中的元素即为该cell对应时间节点下的所有子任务序号。
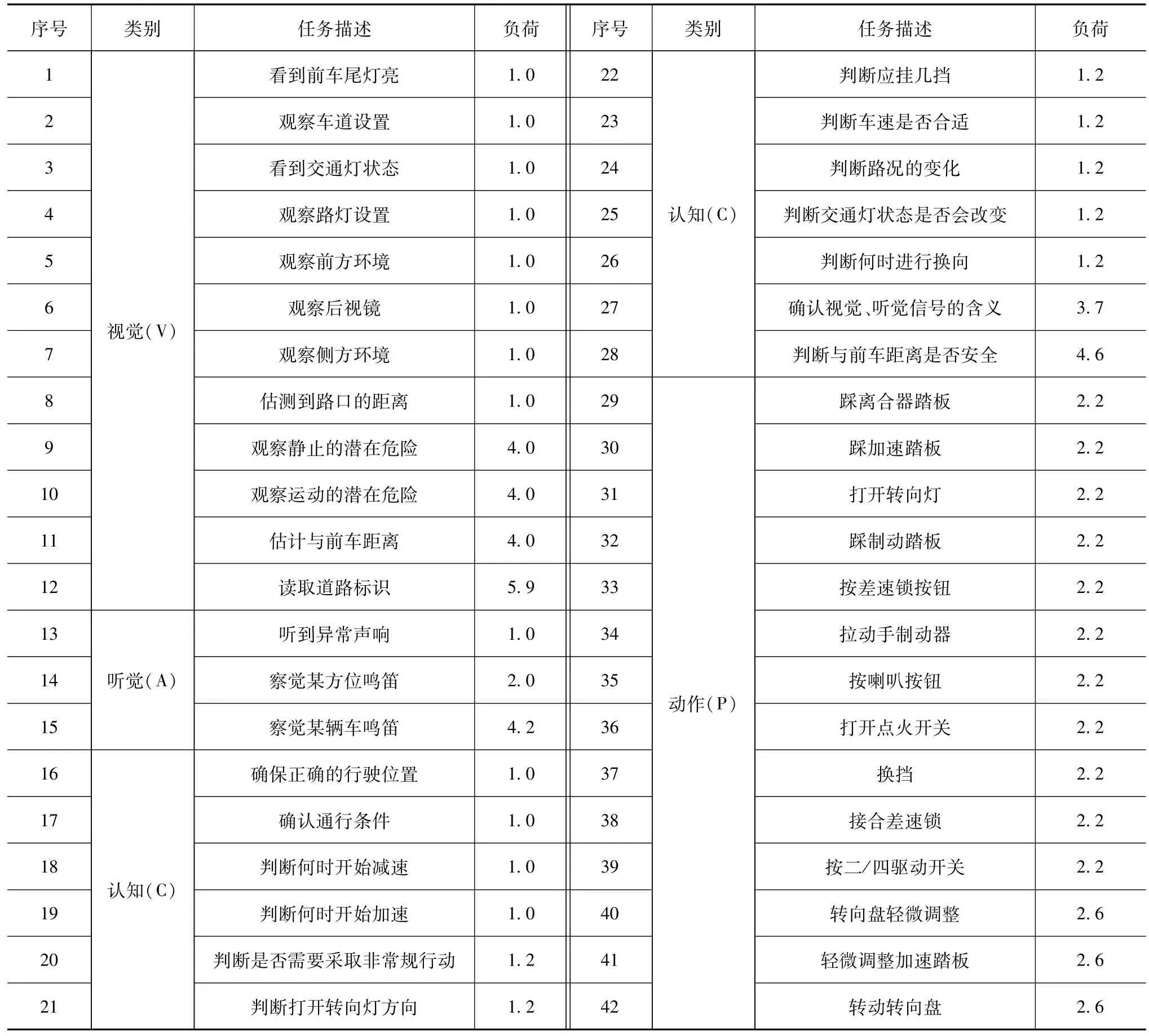
表2 驾驶任务分析表
2.2.4 负荷计算模块
由上面的并行分析可知,负荷值变化的位置也在时间节点处,因此,仅计算时间节点处的负荷值即可。根据前文中的负荷计算模型,对每一个cell中的子任务进行负荷值计算,就得到n个时间节点处的负荷值。在后一个时间节点到来之前,负荷值一直保持在前一个时间节点处的状态。
2.3 系统运行流程
通过对4个模块的功能分析,可总结出整个计算系统的运行流程,如图1所示。
3 负荷计算实例
3.1 任务分析
本文中通过对车辆驾驶任务进行实地观察并对所录制的视频进行分析,采用焦点小组讨论的方法,综合大家的意见,将驾驶任务中所有可能遇到的情况分解为若干个子任务,使用行为要素评定量表对其进行归类并打分。驾驶任务分析表如表2所示。
本文选择了“绿灯路口直行”任务进行研究。在这一任务中,主要包含了驾驶员驶近路口并决定在此绿灯期间是否有足够的时间通过路口这一过程。将“绿灯路口直行”任务划分为表2中子任务组成的序列,如表3所示。
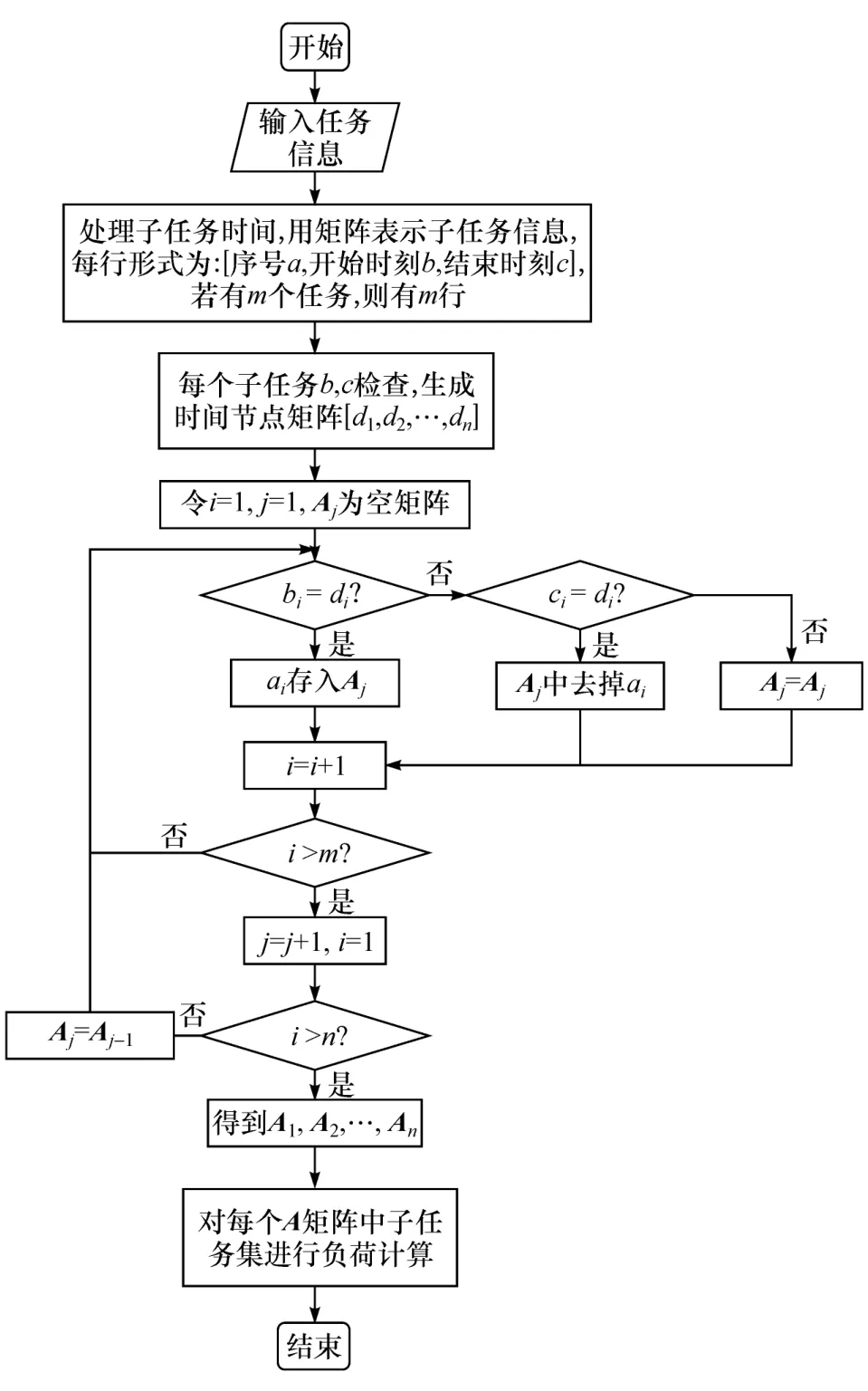
图1 系统运行流程图
3.2 时间处理
从录制的车辆驾驶视频中选出一次表现稳定的驾驶过程作为标准,提取其中各子任务的开始与结束时刻作为普遍情况的均值。在此过程中,按照子任务是否可观测将其分为可见子任务与不可见子任务。对于可见子任务,可直接观测并记录其时间信息;对于不可见子任务,综合驾驶员的驾驶经验对其时间信息进行推测。“绿灯路口直行”任务的“子任务-时间”图如图2所示。
3.3 计算结果
将任务信息输入负荷计算系统,得出“绿灯路口直行”任务在任务时长内的脑力负荷需求值,结果如图3所示。
由图3可知,在“绿灯路口直行”任务的第9 s脑力负荷值最高,因为此时需要进行判断何时开始减速、观察车道、估计到路口的距离、判断车速是否合适和确认通行条件等子任务,因此可在此时对车道状况、到路口的距离和是否须要减速等信息进行适当推送,方便驾驶员获取相关信息,以减轻其脑力负荷值。
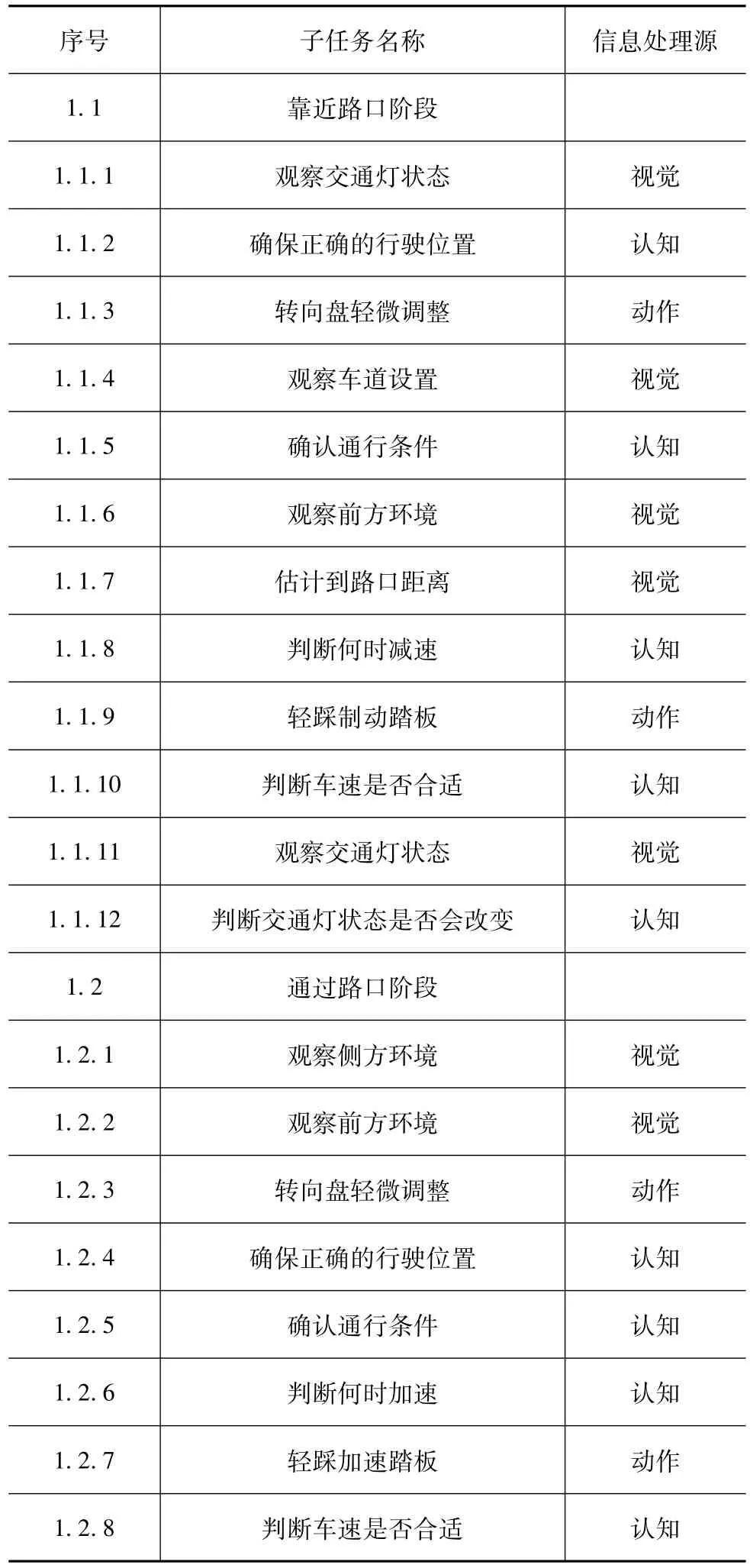
表3 汽车绿灯路口直行子任务序列
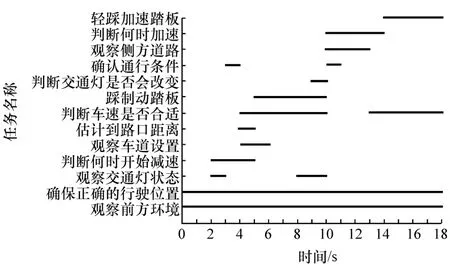
图2 汽车绿灯路口直行子任务时间关系图
图3 汽车绿灯路口直行任务负荷图
4 实验验证
许多文献指出,操作者生理指标的变化能反映其脑力负荷的变化,典型的指标有心脏电信号、呼吸、皮肤电信号、血压、眼动和脑电活动等[17],其中眼动指标包括首次注视时间、总注视时间、平均注视时间、注视次数、眼跳潜伏期与眼跳距离、回视时间与次数、眼动轨迹和瞳孔直径等[18]。各指标与脑力负荷均有一定的联系,但都不能全面反映脑力负荷的情况。因此,本文中选取其中的两种指标作为脑力负荷的评价指标。其中,瞳孔直径的变化能反映瞬时的脑力负荷信息,脑力负荷增大,瞳孔直径也增大,过度认知疲劳时,瞳孔直径反而变小[19]。皮肤电信号随人体的交感神经系统的变化而变化,依赖于人体的汗腺分泌反应[20]。操作者在进行某项较复杂的任务时,由于交感神经兴奋,导致汗腺活动加强,分泌汗液增多,使皮肤导电能力增大,会形成较大的皮肤电反应。皮肤电信号与驾驶员压力水平密切相关[21],随任务需求的增加会显著升高[22]。因此,皮肤电信号的变化也可在一定程度上反映操作者的脑力负荷水平。
本文中在实验室中模拟“绿灯路口直行”任务,采用文献[23]的方法给被试佩戴SMI头戴式眼动仪,测得被试的瞳孔直径,同时,在被试左手无名指和小指末梢部位佩戴BioNomadix无线生理记录仪记录被试的皮肤电信号。实验共选取车辆工程在读研究生5名作为被试,年龄在21-27岁,其中,男生3名,女生2名。实验中,要求被试按照图2的方式同时进行某任务。例如:第1个任务要求被试同时完成观察前方环境、确保正确的行驶位置任务;第2个任务要求被试同时完成观察前方环境、确保正确的行驶位置、观察交通灯状态、判断何时开始减速任务;第10个任务要求被试同时完成观察前方环境、确保正确的行驶位置、确认通行条件、观察侧方道路和判断何时加速等任务。根据实验过程的实时观察,发现皮肤电信号的变化曲线是一个逐渐平缓下降的过程,这主要是因为被试在实验过程中会逐渐适应刺激,从而放松情绪,对刺激的唤醒程度逐渐减低,直到出现较大的新异刺激。因此,取完成此任务时皮肤电信号的最大值作为最终皮肤电信号值。实验得到的瞳孔直径-时间和皮肤电信号-时间关系曲线如图4所示。
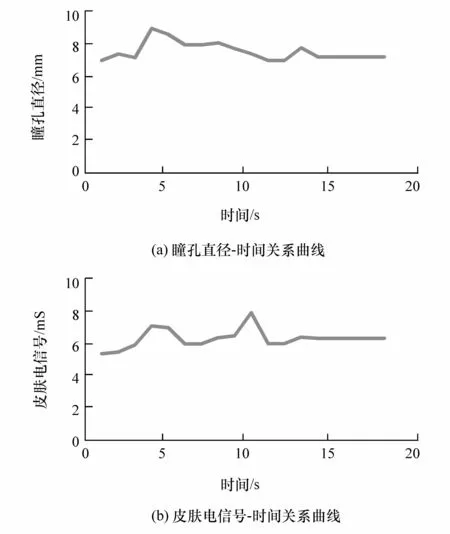
图4 实验图
将瞳孔直径值、皮肤电信号值分别与计算系统计算出的负荷值一起绘制为散点图,如图5所示。
然后对其进行相关性分析,结果如表4所示。由表可知,脑力负荷计算值与瞳孔直径显著正相关,相关系数为0.615(P=0.007);脑力负荷计算值与皮肤电信号显著正相关,相关系数为0.482(P=0.043)。由前述分析可得,真实脑力负荷值与瞳孔直径、皮肤电信号水平密切相关,因此可推知本文中脑力负荷计算系统的有效性较高。
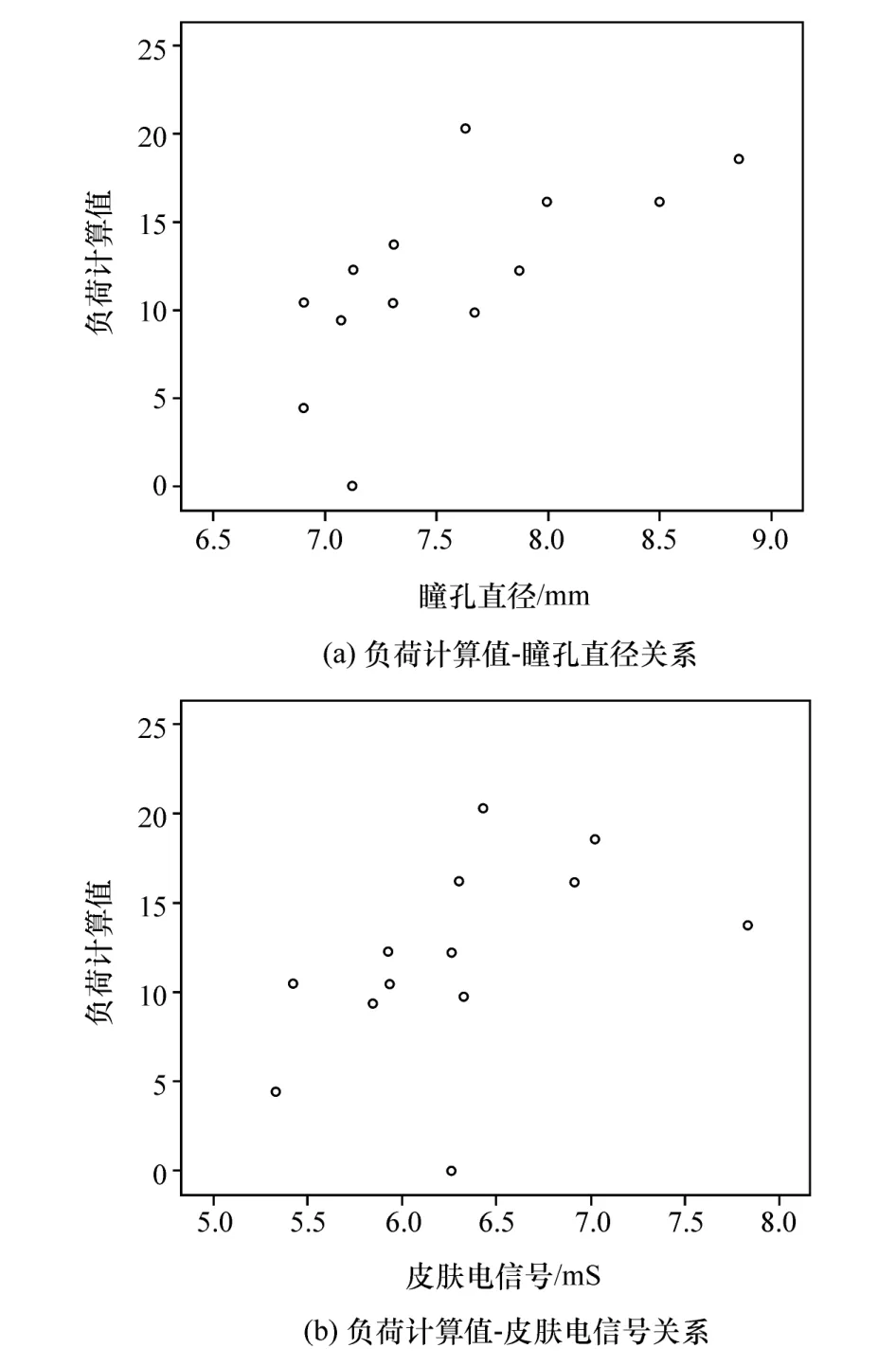
图5 散点图
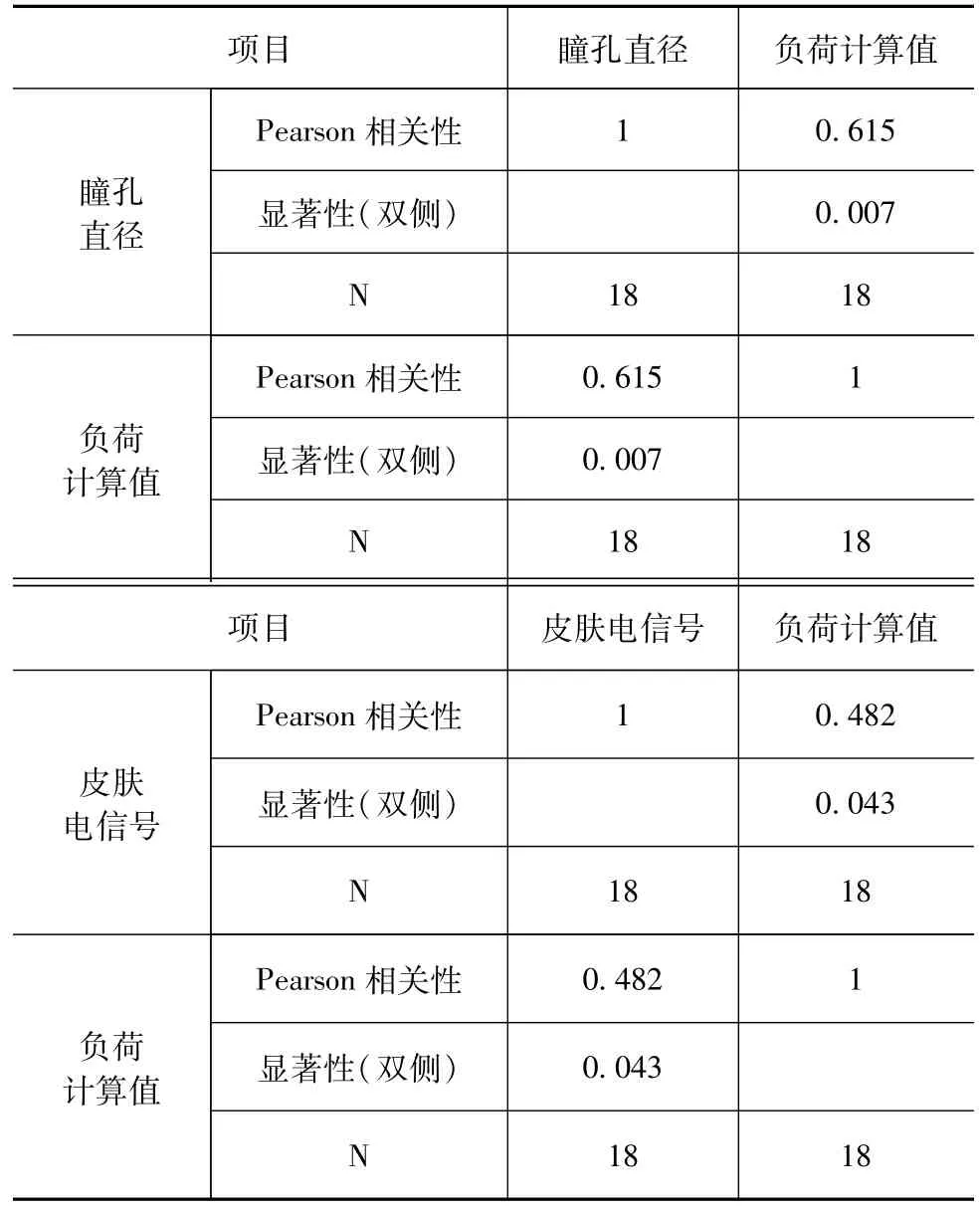
表4 相关性分析表
5 结论
在交通安全的研究中,疲劳驾驶一直是一个重要的问题。国内外许多研究也表明,驾驶员在行车过程中由于需要不断地进行信息交互活动而产生的高驾驶负荷是引发驾驶疲劳的重要因素之一。而随着汽车技术的不断进步,未来汽车的人机系统中将会容纳更多的信息系统。因此,对于评估汽车驾驶过程中驾驶员脑力负荷是否合理是当前和未来汽车研究领域的一个重点问题。本文中基于上述背景,开展了对于驾驶负荷的研究,旨在可以为驾驶负荷的评估提供行之有效的方法。综合本文的研究成果,主要有以下几点。
(1)本文中以多资源理论为基础,形成了脑力负荷计算系统,实现了从驾驶任务到脑力负荷的转化,用于对驾驶员进行驾驶任务时的脑力负荷进行评估。此系统消除了驾驶员个体差异带来的影响,将脑力负荷的结果与子任务联系起来。
(2)鉴于实车驾驶实验难以控制实验变量且危险性较高,本研究从理论上对常见驾驶任务进行分析:拍摄日常驾驶任务视频并采集其中子任务,建立子任务库后可用于很多常见的驾驶任务分析。利用本研究中用到的负荷计算模型,可在实际驾驶之前预测该种驾驶任务所需要的脑力负荷状况。
(3)考虑到驾驶任务的时间不确定性,本研究在整理出驾驶员脑力负荷计算模型之后还增加了任务仿真环节,目的是使计算结果反映不同驾驶情况下的驾驶员脑力负荷。
(4)最后采用生理指标与眼动指标对实验结果进行验证,证明了本文计算系统的有效性。
猜你喜欢
雷达学报(2022年4期)2022-09-01
计算机仿真(2021年11期)2021-12-10
财会学习(2021年22期)2021-11-22
科学与生活(2021年11期)2021-11-10
祖国(2018年21期)2018-12-06
小天使·一年级语数英综合(2018年1期)2018-06-22
数字技术与应用(2016年9期)2016-11-09
小猕猴学习画刊(2015年4期)2015-05-05
小猕猴学习画刊(2015年3期)2015-04-07
小猕猴学习画刊(2015年2期)2015-01-22
