
扫帚式激光三维扫描成像系统设计与实验
2019-12-05 02:57:06张茂云丁红昌于正林
制造业自动化 2019年11期
张茂云,丁红昌,唐 晨,于正林
(长春理工大学 机电工程学院,长春 130022)
0 引言
与红外和可见光成像相比,激光成像具有精度高、速度快和抗干扰能力强等优势。从功能上将激光雷达划分为扫描成像、测距和跟踪。随着激光器发射频率、激光接收器和高速扫描器等技术的快速发展,激光扫描成像的分辨率及扫描频率等都有了极大的提高,在对被测目标的三维重建方面极具潜力。现有的扫描成像方式主要有:振镜式扫描、转镜式扫描和推帚式扫描。
国外已有的激光推帚三维成像系统[1~5]如表1所示。

表1 美国推帚式激光扫描系统
国内三维扫描测量的研究主要集中在振镜式扫描和转镜式扫描,振镜扫描由于其效率高、重复性能好等优势是三维扫描应用最成熟的扫描方式之一。但是要想提高振镜扫描的频率就要牺牲其扫描角度,因此振镜扫描角度一般比较小(10°~25°)。中科院上海物理研究所2009年使用二维振镜扫描方式研制成功机载成像系统,扫描视场角达到了±10°,但是在该视场角下其扫描频率在50Hz以下[6]。
转镜扫描是在马达的带动下旋转的,所以其扫描速度可以做的很快。由于转镜扫描的稳定性高、扫描视场大等特点也成为了三维扫描的主要应用之一,但是转镜体积大、成本高,并且受加工工艺的影响反射面的光束反射质量比较低,因此也影响了测量精度。国防科技大学使用旋转多面镜加脉冲激光测距体制研制出一种面扫描激光测量系统,对24米的被测目标进行成像,测距精度为9cm,扫描频率为30Hz,像素分辨率为16×101[7~10]。
为了消除振镜扫描视场角小以及转镜的加工工艺限制,课题组设计了一种扫帚式激光三维扫描成像系统,分析了系统组成及建模仿真,进行了系统性能测试,并给出了测试结果。
1 系统原理及仿真
1.1 系统组成
如图1所示的激光二维扫描成像系统原理框图。系统由激光发射、接收电路系统,激光发射、接收光学系统,伺服机构,PC机等部分组成。其中脉冲激光器、驱动器、接收APD和信号处理共同组成了接收系统和发射系统。
如图1所示的单线激光雷达系统工作原理如下:首先由控制系统发送时序控制信号,用于控制脉冲激光器发射脉冲信号,发射激光通过光学系统扩束准直,再由单反射扫描系统将发射激光偏转后照射到被测目标,飞行器的水平方向运动完成行扫描,从而使激光束在被测目标上完成扫描覆盖。激光发射脉冲与扫描视场角在时序上完成对应,被测目标散射回系统的回波信号由APD探测器接收,在经过后续的回波信号处理,将电信号转换成目标距离信息,形成距离图像信息,完成三维扫描成像。
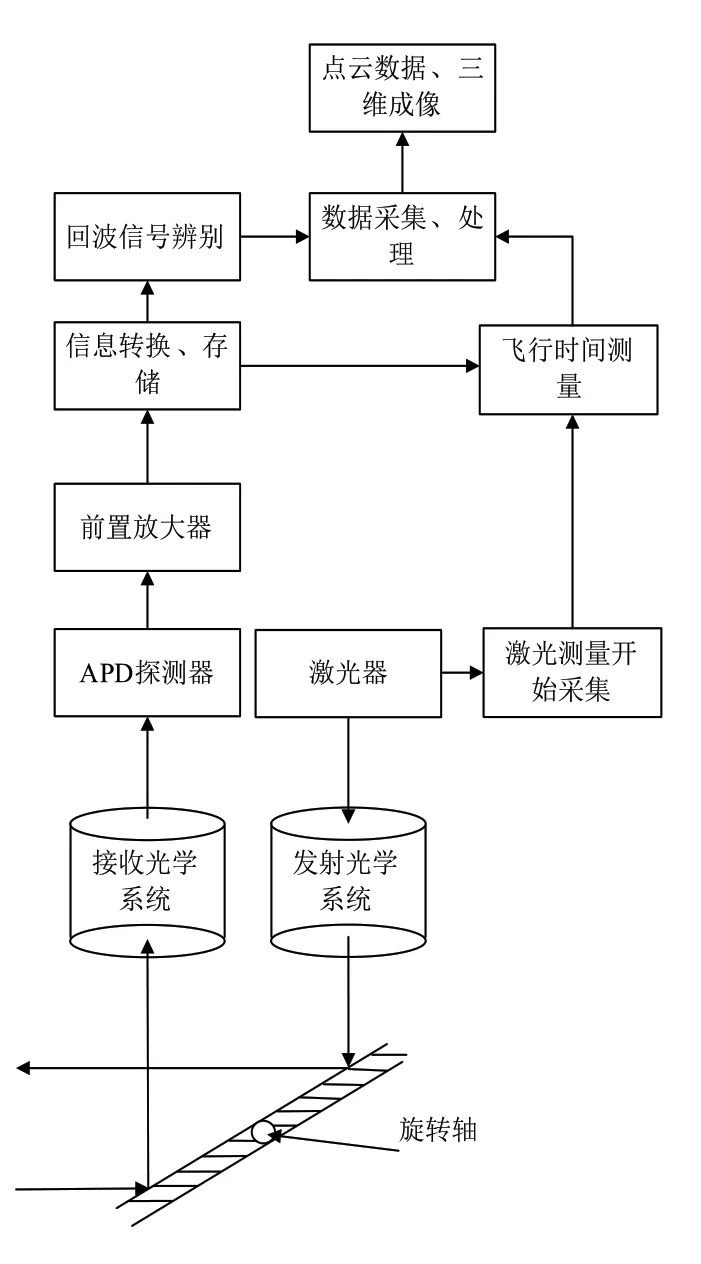
图1 单线激光雷达二维扫描系统组成原理框图
1.2 单线激光雷达扫描测量原理及仿真

图2 扫帚式激光扫描轨迹
如图2所示建立了三维扫描坐标系,设地平面为OXY平面,单线激光雷达最大扫描角为∠ACB,设为θ,扫描系统垂直地平面高度为h=OC,轴向扫描沿X轴正方向运动,由此可得激光雷达扫描测量宽度w=AB如式(1)所示。

为使所成图像不失真,设激光雷达单线测量点数为m(m为奇数),单线激光雷达在水平面所测点之间的距离Δw相等,如式(2)所示。
扫描测量的任一束激光与垂直地平面的光束之间的夹角为Δθ,如式(3)所示。

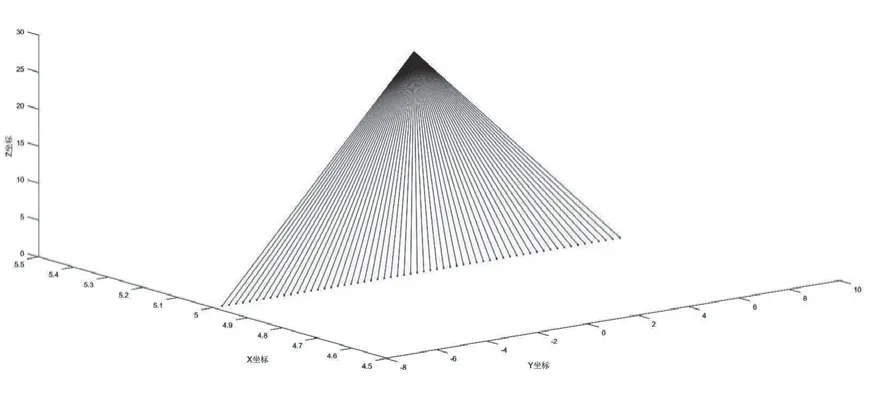
图3 单线激光雷达扫描仿真示意图
单线激光雷达系统沿X 轴方向以速度v 做匀速运动,有l=vt,那么被测目标的光斑坐标就变成了s′(vt,kΔw,0),假设v=10m/s,在时间t=0.1s,时间间隔Δt=0.01s情况下,单线激光雷达帧扫描轨迹如图4所示。

图4 单线激光雷达帧扫描轨迹示意图
通过前面的分析可以知道在无障碍物的地平面上光斑坐标为s′(vt,kΔw,0),建立如图5所示的单点激光照射物体表面示意图,设光速c、激光发射到物体表面飞行时间t',那么s''点的坐标可表示为。实际应用中是由激光雷达测量获取的数据。

图5 单点激光照射物体表面示意图
假设障碍物直径是0.25m的球,如果按照图4的扫描参数对其进行点云绘制,可以得到如图6所示的轨迹。
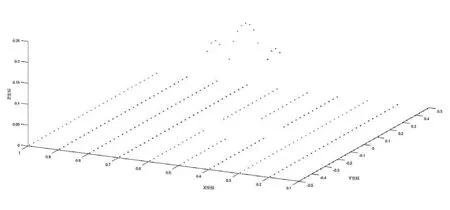
图6 v=10m/s的障碍物扫描轨迹
从仿真结果上很难看出障碍物的形貌,那么将速度修改为v=5m/s,其他参数不变的情况下,得到如图7所示的轨迹图。
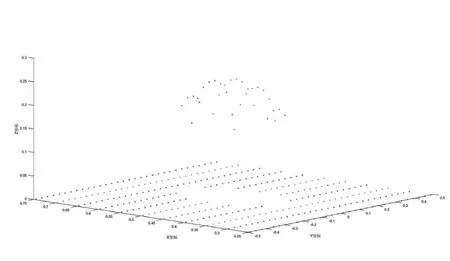
图7 v=5m/s的障碍物扫描轨迹
从图7可以很好的分辨出障碍物的外形轮廓,由图6、图7可以得到,要想的到很清晰的物体轮廓,就必须放慢帧频,增加行分辨率,而视频帧频率在30Hz以上,所以要想激光扫描三维绘制看起来很流畅,那么帧频最小要达到30Hz,在即保证分辨率又保证帧频的情况下,就必须提高雷达数据采集频率。在现阶段受芯片速率的影响,还很难两者兼顾。因此在实际系统测量过程中,只能先保证物体分辨率,舍掉一部分帧频。
2 系统实现

图8 扫帚式三维成像系统测试现场
如图8所示单线激光雷达扫描测试现场,所用单线激光雷达的水平视场角为30Hz,数据帧频为30Hz,单线点云数为501点,沿X轴帧扫描直线电机参数为:加速度a=20m/s2,最大速度v=825m/s(实际使用v=800mm/s),那么对于直径为0.25m的球扫描,由仿真可知要想看清球的外貌在球体上最少要扫描5条线,我们就按照Δl=60mm间隔扫描8条线为一帧图像,分别对人体和球体进行扫描,得到如图9所示实际扫描三维成像效果,由上述参数可以计算出直线电机运行60mm所用时间约为0.047s,那么一帧图像的频率约为2Hz,就算不考虑直线电机运行时间,帧频也只能在4Hz左右。
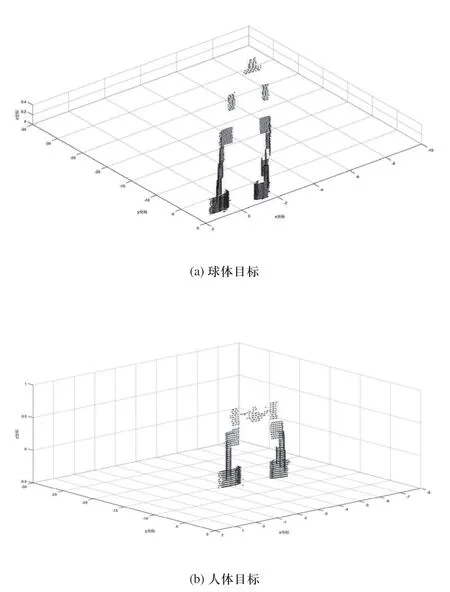
图9 扫帚式三维扫描系统实测效果
3 结语
论文结合三维成像激光雷达现状,建立了一种基于单线激光雷达的扫帚式三维成像系统,通过仿真以及实验现象很好的完成了目标物的形貌判别,建立的三维测量系统在30m距离处对目标进行扫描,角度分辨率0.06°,行分辨率6cm,帧频2Hz。实现了快速扫描、高精度目标测量及系统小型化等目标。
猜你喜欢
激光与红外(2023年12期)2024-01-15 10:52:46
光学精密工程(2023年1期)2023-02-06 14:08:20
农业装备与车辆工程(2021年12期)2021-12-28 08:24:16
软件导刊(2021年3期)2021-03-25 02:09:42
云南画报(2020年11期)2020-12-14 07:17:32
电影新作(2020年1期)2020-11-14 19:01:11
铁道通信信号(2020年6期)2020-09-21 09:23:10
电影新作(2016年6期)2016-11-20 09:04:28
铁道通信信号(2016年8期)2016-06-01 12:10:21
视听(2016年12期)2016-03-22 03:19:06
