
基于MOTOMAN工业机器人系统的结构化程序设计与分析
2019-12-05 02:56李亚军吴振强
制造业自动化 2019年11期
李亚军,吴振强,杨 鹏,刘 宁,刘 贝
(北自所(北京)科技发展有限公司,北京 100120)
0 引言
化纤行业历来具有劳动密集的典型特征,自动化、智能化的需求尤为迫切。同时随着我国劳动力成本的快速上涨,工业机器人工作站系统及相关产品及服务在化纤的络丝系统,上线系统,码垛系统,物流仓储和分拣系统中得到快速推广和频繁应用。
工业机器人的结构化程序设计要求在程序设计时分清工艺过程,先总体后细节,对复杂工艺过程先设计一些主程序模块,逐步细化子程序模块进行模块化的编程。对于化纤行业来说,无论上线系统、络丝系统或者码垛系统都可以分为抓取和放置两个主程序模块,抓取过程模块可以分为抓取调度,抓取计算,抓取过程和抓取完成的信息处理4个子程序模块;放置过程模块可以分为放置调度,放置计算和放置过程和放置完成后的信息处理4个子程序模块。工业机器人系统在抓取和放置时,无论采用夹抱式,手抓式,钩爪式,真空吸盘式卡具或其他形式卡具,都包括取料动作和放料动作两个子程序模块。通过利用这种模块化编程的独特优势,掌握编程的思路,这样可以在安装调试阶段减少大量的人力物力,降低劳动强度,提高生产效率,节约成本,极大地提高程序的可读性和可移植性。
1 工业机器人工作站工艺流程简介
本文以某化纤工程项目MOTOMAN工业机器人码垛系统工作站工艺流程为例说明,即人工将一摞栈板(8~15个)放置在拆盘机入口输送机上,拆盘机拆分一个栈板自动送至输送机上,栈板称重后由输送机输送到码垛工位。机器人根据丝饼规格批号从工位1(隔板工位),工位2(顶板工位)和工位3(底板工位)抓取不同的隔板,与丝饼间隔放置,一起堆垛成垛。
码垛垛形如图1所示。码垛的底层为栈板,它可以为木栈板或者塑料栈板等;栈板上放置一层底板,底板一般为木纸板;在木纸板上放置第一层隔板,其次放置一层丝饼,丝饼放置于隔板的孔径中,防止码垛运输过程中丝饼晃动,损坏丝饼,隔板和丝饼交替放置;在码垛丝饼的最高层处放置一层顶板。一般情况下,隔板和顶板为不同的泡沫隔板或者蜂窝板。
2 影响结构化程序设计的因素
工业机器人工作站在结构化程序设计过程中,受到影响的主要因素有:
1)机器人卡具的影响。常用的机器人卡具有钩爪式,真空吸盘式和夹抱式等。

图1 码垛垛形
2)箱子尺寸的影响。箱子的尺寸应在机器人卡具的工作变径范围内,若箱子的长度小于机器人卡具的长度时,箱子被夹在卡具内部,在放置时应考虑卡具对已码垛型的影响,进而影响作业调度中放置位置的计算程序。
3)现场抓取工位和放置工位的数量和布置。
4)生产效率和生产节拍的要求。
3 结构化程序设计
3.1 程序结构
程序结构组成,根据实际需要一般分为一般作业程序结构和分步作业程序结构如图2、图3所示。
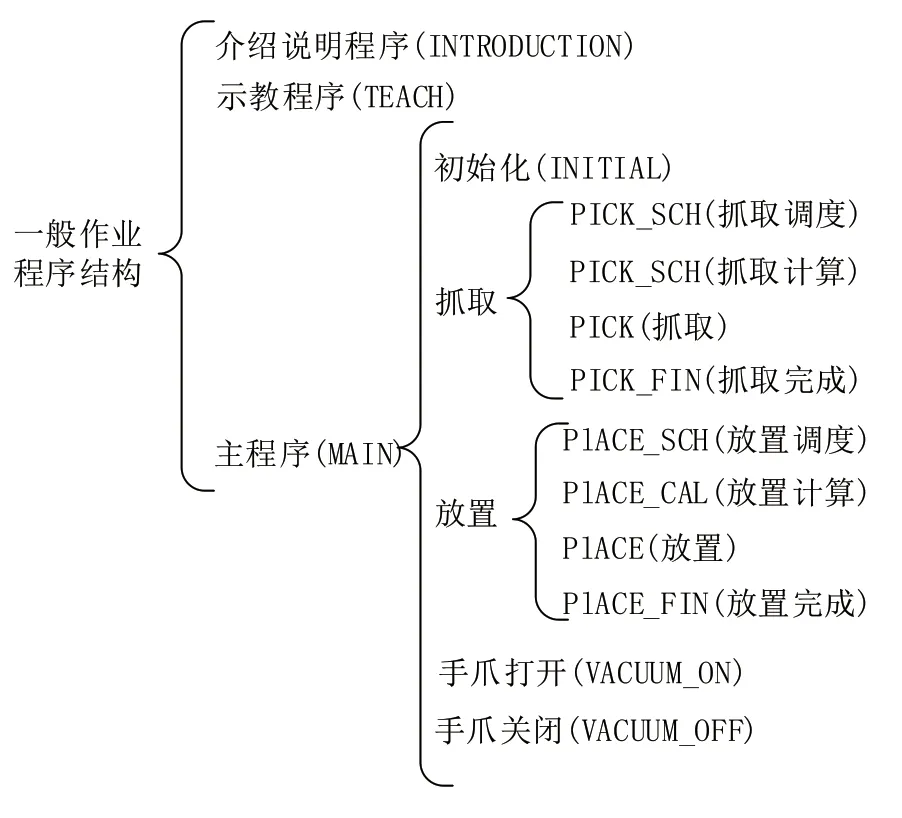
图2 一般作业程序结构
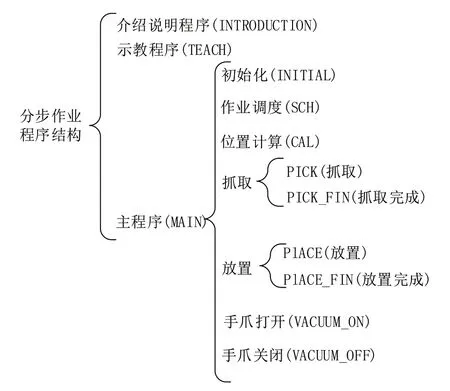
图3 分步作业程序结构
3.2 程序流程图

图4 一般作业程序流程图

图5 分步作业程序流程图
在实际应用中,机器人结构化程序设计一般采用如图4所示一般作业程序流程图和如图5所示的分步作业程序流程图,其主要区别在于调度程序和位置计算程序的不同。
调度程序一般分为:作业调度,抓取调度,放置调度;位置计算程序一般分为作业计算,抓取计算和放置计算。而每种调度程序又可分为顺序形式结构的调度程序和令牌形式结构的调度程序。本文以抓取调度为例说明,其余不再详述。
结构化程序设计流程图无论采用顺序结构,选择结构还是循环结构,它的起始位置都要调用初始化程序,用于复位机器人位置,输出信号,中间变量和数据。执行初始化程序后,进入无限循环结构,将机器人需要重复运动的动作与初始化程序隔离开来,重复执行抓取和放置动作,完成机器人信号的交互。
如图4所示的一般作业程序流程图是常规的程序结构,在作业生成前,判断抓取位置的允许抓取信号和放置位置的允许放置信号应同时满足条件后,生成作业去向后,执行机器人程序,抓取动作和放置动作连续执行,中间不出现停顿。它又有明显的缺点:事件前判断抓取条件,工作效率较低;机器人抓取完成后,不再进行放置位置放置信号的校验。
如图5所示的分步作业程序流程图中,抓取过程和放置过程分步执行,抓取条件满足执行抓取程序,动作完毕后进入放置程序块,放置条件满足,执行放置程序,抓取和放置分步循环进行,先判断后执行。程序执行效率高,产量大。
3.3 初始化程序
初始化程序主要包括必要的程序注释,布尔量的初始化,IO信号的初始化,位置变量的初始化和重要数值标志的初始化如自定义取板标志B0001,令牌指令标志B0002,抓取次数标志B0003和放货标志B0004等。
3.4 抓取调度程序及流程图
抓取调度有两种形式,即顺序形式抓取调度和令牌形式抓取调度。对搬运工作站,为了简化程序,可以只设置抓取调度就可以。
3.4.1 顺序形式抓取调度
顺序形式抓取调度如图6所示,程序周期循环检查,每个扫描周期,先从第一个工位判断是否有允许抓取信号,如果没有允许抓取信号,则按工位顺序依次判断,最后根据生成的允许抓取信号,对作业标志B0001进行赋值,生成作业标志。最后对作业标志进行判断,只有作业标志在正常数值范围内才允许执行后续的计算程序和作业程序,如果不在范围内则重新判断赋值。
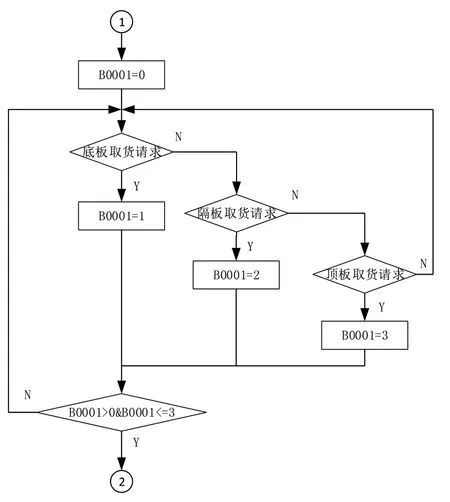
图6 顺序形式抓取调度流程图
3.4.2 令牌形式抓取调度
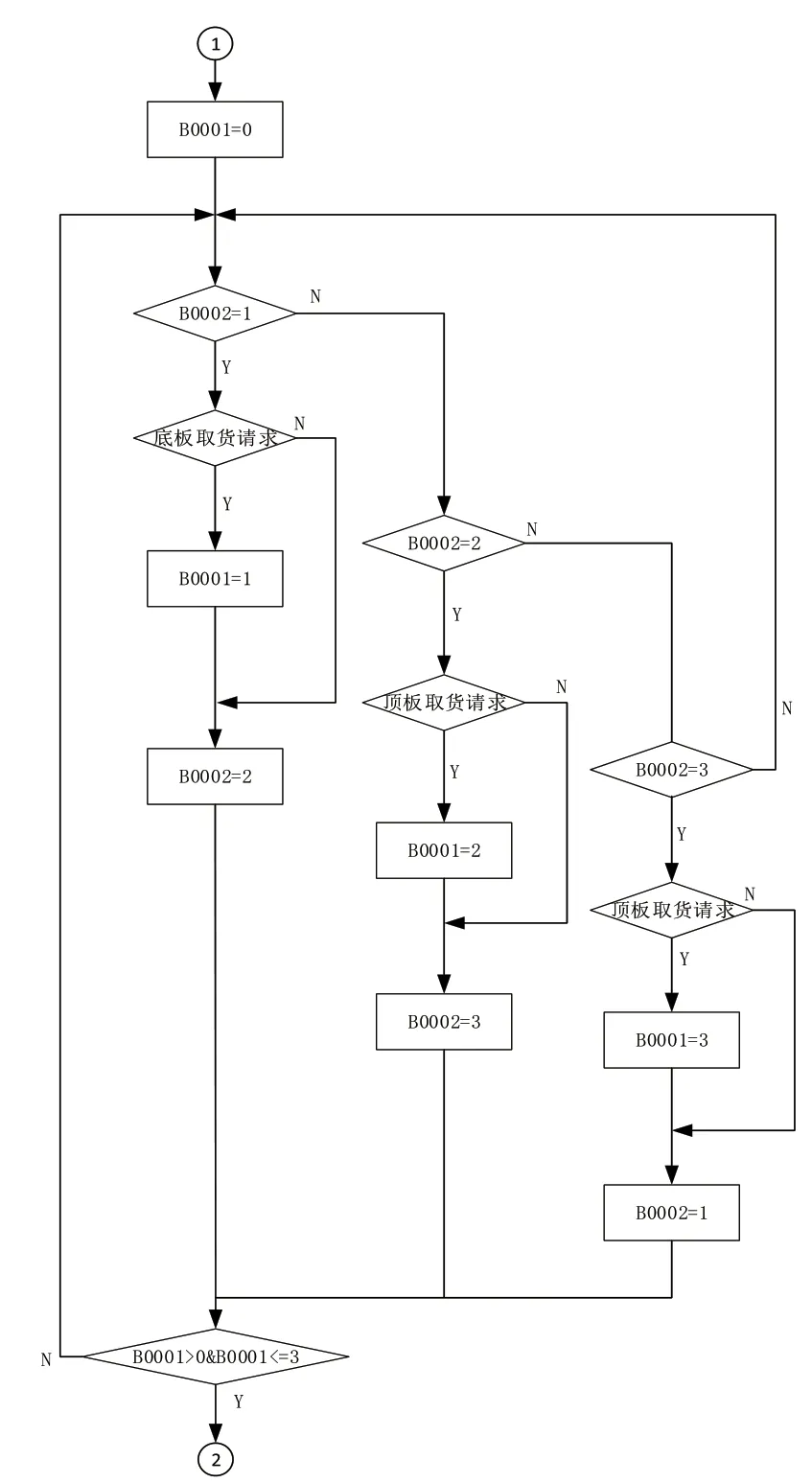
图7 令牌形式抓取调度流程图
令牌形式抓取调度如图7所示。程序循环执行。上一工位抓取和放置过程执行完毕后,为令牌指令标志B0002赋值。在下一扫描周期,先根据令牌指令标志B0002的值判断指定工位有没有允许抓取信号,如果没有允许抓取信号,根据令牌生成的顺序依次执行判断,最后根据生成允许抓取信号的工位,为作业标志B0001进行赋值,生成作业,同时生成指定的令牌标志值。令牌指令标志B0002的值可以顺序生成,也可以错序生成。最后判断作业标志是否在正常数值范围内,如果在正常范围,则往下执行计算程序和抓取程序,如果不在范围内则重新判断,对令牌指令标志重新赋值。
3.5 抓取流程图及程序
抓取流程图如图8所示。

图8 抓取流程图
3.6 放置调度及放置流程图
放置调度流程图如图9所示。机器人抓取完毕,信息交互正确无误后机器人移动到放置等待点,首先从第一个工位判断对应站台是否放货准备好,即是否有允许放货信号。如果没有允许放货信号,则按链式机站台顺序依次判断,最后生成放置工位作业标志B0004并进行赋值;另外也可以预先读取丝饼的信息,根据丝饼信息,逆向判断放置工位是否准备好。最后对放置工位作业标志B0004进行合理化值判断,防止手动干预机器人的运行,只有作业标志B0004在正常数值范围内才允许执行后续的计算程序和作业程序,如果不在范围内则重新判断。放置工位准备好后,要读取丝饼信息,批次,纸管筒型和放置层数,进行校验,信息校验不合格时暂停机器人程序执行,防止混批。
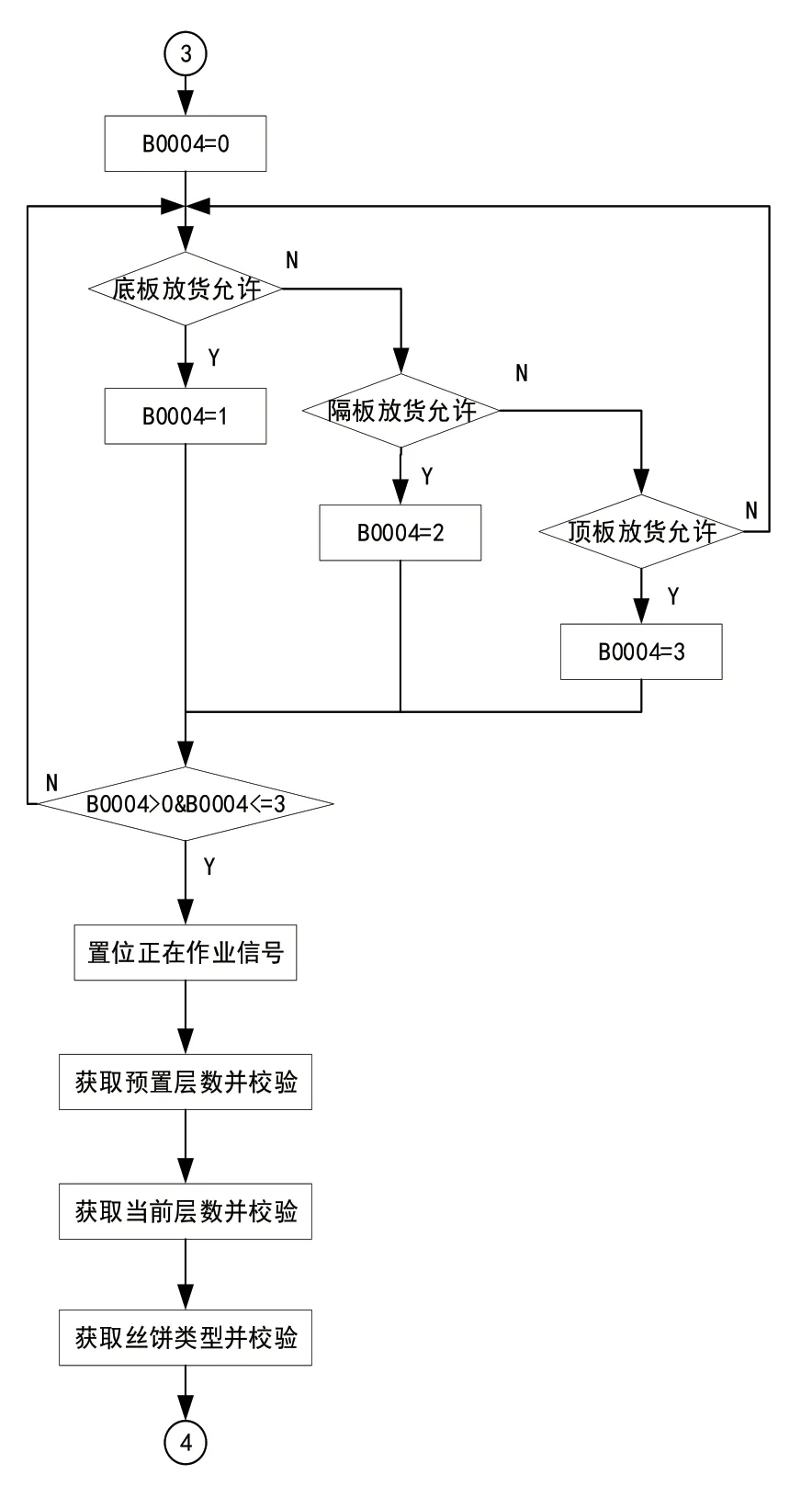
图9 放置调度流程图
放置流程图如图10所示,主要包括常用的码垛算法,放置完成信息交互,轨迹移动和机器人辅助卡具的动作。常用的码垛算法,是用来计算码垛放置点和码垛减速点等过渡点的程序,主要包括基于放置位置的码垛算法和基于栈板位置的码垛算法。基于放置位置的码垛算法:码垛放置程序计算简单;易于理解;前期工作量比较大;示教基准点较多,示教位置点工作量较大;增加箱型比较麻烦,需知道栈板的尺寸,箱子尺寸,需要画详细码放跺型图,测量放置基准点到栈板边缘的距离,示教基准点,修改地面站程序和作业调度,可实践性差,程序继承性不好;调整跺型不便。此方式适用于箱型少,品种规格较少的码垛方式。基于栈板位置的码垛算法:跺型放置程序编写复杂;前期工作量不大,根据每种箱子的尺寸,只需知道码放跺型即可;示教基准点比较少;由于示教基准点位置,考虑了栈板的位置的因素影响,调整跺型方便。此方式适用于适用于箱型多,品种规格较多的码垛方式。
因此可以根据项目实际应用的要求,针对具体的作业方案,选择具体的算法。

图10 放置流程图
4 应用特点
一般程序流程图:常用于简单的单一品种,无信息交互的搬运码垛系统;它先执行作业调度,作业生产后抓取过程和放置过程连续执行,中间不进行外部条件判断;工作效率低。
分步程序流程图:适用于多品种、多工位和有信息交互的有复杂工艺要求的工业机器人工作站系统;作业调度分为抓取调度和放置调度,抓取前,先进行抓取条件判断,生产作业后进行抓取作业;放置前,先进行放置条件判断,生产作业后进行放置作业。此过程执行前先判断外部信息条件,分步执行;工作效率高。
顺序形式抓取调度,一般适用与单一工位或者两个工位的工业机器人工作站系统。令牌形式抓取调度:适用于多工位的工业机器人工作站系统,效率高。
5 结语
总之,工业机器人结构化程序设计不仅适用于工艺单一程序短小的工程项目,而且对于工艺复杂程序规模较大程序复杂的情况更能起到良好的执行效果,工业机器人结构化程序设计就显的更有必要性,这样不仅可提高程序可读性、易维护性、可调性和扩展性,而且操作简单,节约成本,提高工作效率。因此,在实际应用中,工业机器人结构化程序设计要做到主次分明,层次清晰,在编程方面,把握总体结构,针对具体工程方案,进行机器人程序编写。
猜你喜欢
百科探秘·航空航天(2022年6期)2022-06-28
小猕猴学习画刊·下半月(2022年2期)2022-04-16
装备制造技术(2020年3期)2020-12-25
网络安全技术与应用(2019年7期)2019-12-24
电子制作(2019年20期)2019-12-04
计算机与数字工程(2019年4期)2019-05-07
舰船电子工程(2015年5期)2015-03-14
科技传播(2011年10期)2011-06-14
科技传播(2011年4期)2011-04-13
