
机动合成孔径雷达成像研究现状与发展趋势
2019-12-03 02:07马彦恒侯建强
兵器装备工程学报 2019年11期
马彦恒,侯建强
(陆军工程大学石家庄校区 无人机工程系,石家庄 050003)
1 机动SAR的分类与研究现状
1.1 弹载机动SAR
弹载平台要实现对目标区域的打击,需要经过爬升、平飞、规避与俯冲等多个阶段的运动,尤其是在平飞、规避和俯冲阶段,都需要SAR平台对目标区域进行匹配和监测。SAR在弹载平台上的应用属于典型的机动SAR,包含了SAR在三维空间内偏离理想轨迹的各种特性。
美国雷声公司的X波段和Ka波段高速机动平台SAR系统分辨分别达到了15 m×15 m和3 m×3 m[2]。Goodyear公司[3]用于空地导弹上的SAR能够进行目标价值判别。洛拉尔公司的高速机动SAR系统可向侧向旋转或向前方直视,能够实现常规地形规避[4]。美国相关单位还进行了动态战术导弹SAR测试床[5]的研究。此外,“潘兴Ⅱ”导弹就采用了雷达地形匹配制导,是目前命中精度最高的地对地弹道导弹之一。美国还研制了宽域搜索(WAS)的高速机动平台SAR系统[6]也可以与激光雷达一起构成多模式导引头,用于末段制导。俄罗斯研制的“白杨-M”[7]可以进行突防机动,也需要合成孔径雷达的机动成像配合地形匹配技术,其命中精度约100 m。法国研制的94 GHz和35 GHz的成像雷达传感器的地图匹配制导系统[8],也是在弹载平台上的典型应用,可以探测和选择攻击。德国FGAN研制的Ka波段和W波段SAR成像雷达[9],能够实现空对地高速机动平台SAR成像,并进行了实测实验。以色列的“杰里科”-2弹道导弹参考并应用“潘兴”II导弹的末端制导技术,带有雷达成像终端制导系统,能够快速重新输入目标数据,可在多个目标中进行选择性打击[10]。瑞典与德国联合开发的RBS1 5-MK3[11]反舰导弹SAR导引头配合红外模式能够实现全天候作战。
SAR能够发现隐藏和伪装的军事目标,是导弹实现精确打击的有力手段,其在弹载平台上的应用是典型的机动成像过程,具有广阔的发展前景。
1.2 机载机动SAR
弹载SAR的机动成像过程是结合弹载平台的弹道轨迹与战术动作完成的,主要体现在非匀速平飞、俯冲和规避动作过程中,以大前斜视成像为主,成像时间较短。机载SAR成像过程相对弹载SAR而言,机动曲线形式较为多样,成像时间相对较长,主要分为基于扰动误差的机载SAR、沿航向的非匀速机载SAR和曲线SAR。
基于扰动误差的机载SAR主要是由于气流扰动和测量误差引起的机载平台偏离理想航迹运动,属于小误差的理想航迹偏离机动。沿航向的非匀速机载SAR属于一种非匀速平飞的机动模式,主要考虑方位向非匀速运动带来的空变性。而曲线SAR的运动情况更为复杂,是机载机动SAR的一种典型情况。
曲线SAR的思想是1994年由美国海军地面作战中心的Kenneth Knaell博士提出来并论证的[12]。其基本原理是利用聚束SAR的模式,使雷达平台通过曲线航迹,在空间内做方位-高度曲线机动,并对回波信号进行方位、高度等效孔径合成,从而获得方位向和高度向的二维分辨能力,其距离向的高分辨率是通过发射大带宽信号,并对回波信号进行脉冲压缩而实现的。
目前机载曲线SAR的研究,根据孔径形状(曲线轨迹)可以分为圆迹SAR、抛物线SAR、半抛物SAR等,如图1所示,图1(a)、图1(b)、图1(c)分别是圆迹SAR、抛物线SAR、半抛物SAR运动轨迹俯视图,其中半抛物和抛物SAR属于圆迹SAR的一部分。
综上所述,在现阶段社会经济逐渐发展起来,城乡建设成为人们关注的重点。在这个过程中,农村建设的过程中要关注景观规划设计,村部的形象是新农村建设的重要标准。在农村经济发展起来的情况下,农民对生活环境也提出了比较高的要求。由此,合理的规划和设计新农村景观,就要制定出完善的方案,在迎合农村居民需要的情况下,在其中合理的融入文化和自然因素。最终,为新农村建设和发展制定出一条通畅的道路。

图1 3种孔径形状的曲线SAR
曲线SAR的思想被提出不久,美国海军就利用直升机平台对曲线SAR的成像机理进行外场试验[13],佛罗伦萨大学的Li Jian等学者提出用Relax现代谱估计方法来进行CLSAR的三维特征提取[14]。国内关于曲线SAR的研究起始于2000年。但是,通过十几年的研究,曲线SAR的发展尚未成熟。在成像模式上,主要集中于CSAR[15]的研究上。
1.3 双基机动SAR
双/多基地SAR[16]的发射和接收装置分别处于不同的载体平台中,具备更多优势:成像区域广泛,可以多角度观测;隐蔽性好,抗干扰能力强;节约运动平台载荷资源和频率资源;双基配置灵活等。
早在1977年,美国Xonics公司就对前视双基SAR进行了仿真实验,该实验能够发现树林中缓慢移动的坦克,取得了较好的仿真效果;1983年,在美国密西根进行了机载双基试验;1984年,美国“挑战者”号航天飞机与CV-990飞机构成实验系统;1992年,由ERS-1号卫星与飞机结合搭建了“星-机”双基系统;1994年由SIR-C雷达与飞机构建成了双基系统,将分辨率提升到了12 m;2007年,德国相关研究机构实现了Terra SAR-X卫星与DO228型飞机的双基实验,并获取了第一幅民用双基SAR图像[17]。
国外学者将双基SAR分为了3个等级[17]:第一个等级是将传统的单基地SAR,等效为双基SAR的特例;第二个等级为移不变双基SAR,也就是双基均做匀直平飞运动,可以是运动参数相同,也可以不同;第三个等级为移变双基SAR系统,双基中存在非匀直平飞运动。
本节结合二、三等级的情况,从不同角度对双基SAR进行了划分。根据运动平台的不同可以分为:“机-机”双基、“空(机)-地”双基、“星-机”双基、“星-星”双基、“弹-机”双基、“弹-地”双基、“弹-弹”双基等;根据运动形式的不同可以分为:一基固定一基运动(匀直属于第二等级,非匀直运动属于第三等级)、双基匀直平飞(第二等级)、一基匀直平飞一基非匀直运动(第三等级)、双基非匀直运动(第三等级)等。
其中,一基固定一基运动,常见于“空(机)-地”双基地SAR成像中,可以是发射机固定、接收机运动;也可以是接收机固定、发射机运动。前一种情况,发射机主要隐蔽固定于场景附近地势较高的山坡[18],有利于提高运动平台的电磁隐蔽性,保障其完成攻击和侦察任务。后者主要用于节约运动平台的载荷资源,有利于多传感器的复合使用和对雷达低空盲区的监测。双基匀直平飞主要见于“机-机”双基和“星-机”双基中,可以解决单基SAR前视时,距离与方位同向,无法二维成像的问题[18]。一基匀直平飞一基非匀直运动常见于“弹-机”双基SAR成像中,主要结合机载平台的运动特性和导弹的运动特性完成双基成像,可以满足无人机/有人机挂弹遂行任务时,弹载平台对前视成像的要求。双基非匀直运动则适合于“双弹伴飞”遂行任务,对双弹前视成像的要求,有利于提高弹载平台的成像时间。
从工作模式上,双基SAR还可以分为合作式双基SAR和非合作式双基SAR。合作式双基SAR主要是指接收和发射的波束需要严格控制,以确保发射机和接收机的时间同步、空间同步等。非合作式双基SAR主要是指发射波束和接收波束中有一方不改变,只改变另一方的情况,常见于“星-机”和“空(机)-地”双基地SAR中[17]。
此外,还有多基星载SAR[19],它能够遂行多种任务:二维/三维成像、地面运动目标检测、干涉测高等内容。多基星载SAR的机动模型更为复杂,各星两两结合就可以等效为双基SAR。
1.4 其他运动平台的机动SAR
其他平台的机动SAR主要包括两类:临近空间机动SAR和星载机动SAR。
临近空间机动SAR[20]主要指在临近空间中以无人机、飞艇等作为载体的合成孔径雷达,具有超高空长航时、生存能力强的特点,且以慢速平台为主。但是,临近空间SAR受气流影响大,平台不稳定,波束指向存在偏差,运动模型不仅存在三维空间速度变化,还存在一定程度的横滚、俯仰和侧滑变化,以螺旋前进模型为代表。
星载机动SAR有“8”字型卫星轨迹,它是通过大倾角圆形同步轨道形成的;还有地球同步轨道圆迹SAR[21],通过在静止轨道上设计较小的偏心率和倾角,形成近圆的卫星轨迹,这种模式使SAR载荷的凝视成像成为了可能,兼具二维和三维分辨率的特性。
2 发展方向
机动SAR的偏离理想轨迹的原因可以是由平台本身特性造成的,也可以是主动造成的,是对传统SAR成像能力的一种扩展。它们都是对传统成像条件的一种突破。本节从平台特性以及发展需求的角度分析发展方向。
2.1 无人机载机动SAR的发展
SAR在机动战术飞机上的应用可以追溯到1982年,John N.Damoulakis 等对机动战术飞机上的SAR运动补偿系统的分析[22]。近些年来,无人机的发展得到了越来越多的关注,多模式、长航时、轻型化、小型化的研究,是无人机发展的重要方向。无人机的成熟发展对SAR也提出了越来越高的要求,也促使SAR不断适应无人机的新要求。如小型化无人机的发展,也要求SAR向轻型化、小型化发展,以适应无人机的载荷要求。当前,市场上已经出现了消费级无人机载SAR的产品,如:可用在消费级四旋翼无人机上的PaulsOn 410 超宽带雷达(简称,P410 雷达),如图2所示,几何尺寸只有7.6 cm×8 cm×1.6 cm,可使用电池供电,发射脉冲重复频率为10 MHz的短脉冲,其频带宽度为3.1~5.3 GHz,中心频率为4.3 GHz,可以通过USB接口进行控制和信息传输。如图3所示,整个P410 SAR系统包括一个P410雷达、一个树莓派微型计算机、WiFi通信模块和螺旋天线,整个系统(包括线缆和电池)总重不超过300 g。它可以将天线指向地面,从而实现对正下方的目标进行成像。同时,其也可以固定在汽车上进行成像。成本低、便携性好,是一种适合于实验室用的消费级雷达。
图2 P410 雷达
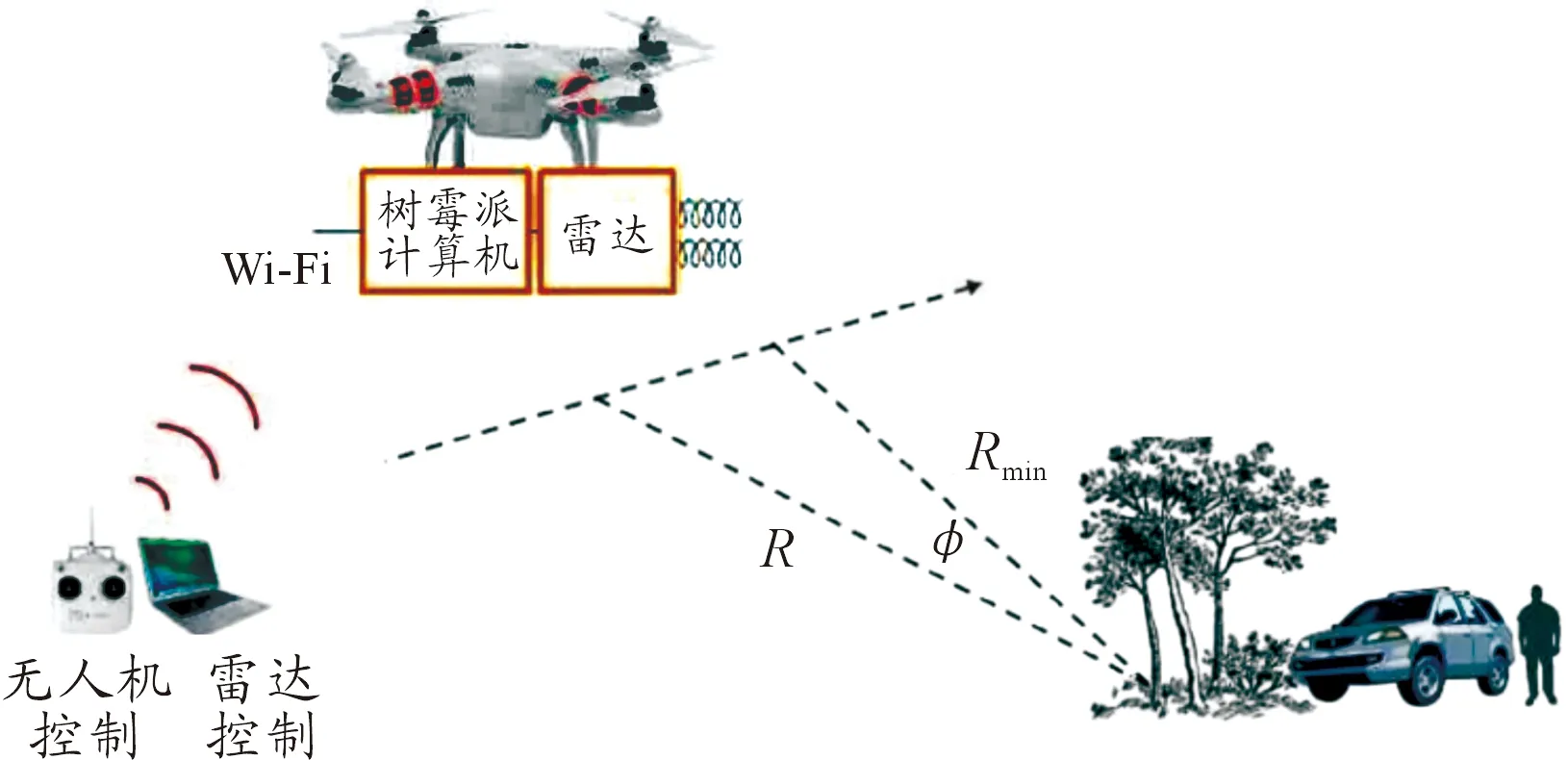
图3 P410 SAR系统
文献[23]指出各种机载平台中,无人机平台的运动补偿难度较大。而无人机不仅在民用侦察、监测等领域得到较大发展,也是现代作战的重要方向。其容易受到气流干扰,运动轨迹常常出现偏离理想估计的情况。从运动模型上分析,无人机载SAR成像模型更接近于机动SAR成像模型。此外,随着武器装备的快速发展,“察打一体化”、“即发现即打击”、“侦察常态化”模式是无人机发展的重要方向,同时也对对无人机载SAR提出了更高的要求,也需要其具备机动成像能力。
要实现超高分辨率SAR成像,通常需要平台配备高精度的 DGPS 和 IMU,获取高精度的参数测量,然而无人机平台载荷有限,主要依据回波数据进行参数估计。针对基于回波的运动误差补偿通常可以采用相位梯度和最小熵的方法处理图像,使得成像结果更聚焦。但是因运动误差造成的空变性误差,则需要采用子图像或者更加精确的校正模型解决。随着成像精度要求越来越高,如何从回波中有效估计的高精度的运动误差,实现无人机载机动SAR高分辨率成像,仍然是目前需求解决的难题。其中,如何高效快速地利用最小熵实现无人机载SAR的运动误差,是解决这一问题的一个重要方向。
2.2 双/多基SAR的发展
双/多基地SAR的发射和接收装置分别处于不同的载体平台中,具备更多优势:成像区域广泛,可以多角度观测;隐蔽性好,抗干扰能力强;节约运动平台载荷资源和频率资源;双基配置灵活等。双基机动SAR的形式多样,可以形成“机-机”、“空(机)-地”、“星-机”、“星-星”、“弹-机”、“弹-地”、“弹-弹”等双基成像体制。双基SAR在对地质探测、无人机协同作战等方面具有潜在的体制优势[16]。
同时,在无/有人机挂弹遂行任务、“双弹伴飞”遂行任务中,双基机动SAR通过“机-弹”、“弹-弹”结合,可以提高攻击平台和侦察平台的战场生存能力和载荷能力,有效地保障其实现打击和侦察任务。秦玉亮[24]在其博士论文的总结与展望中指出,采用机弹协同双基地 SAR 成像是未来的重要发展方向。除此之外,有关一基固定一基飞行模式[25]及双基斜飞模式[26]也正处于热点研究。
2.3 高分辨机动SAR成像
2012年的相关报道中SAR的超高分辨就已经可以达到0.05米的精度[27]。对于成像后的SAR影像,成像分辨率成为评价雷达系统的重要指标。高分辨就是要获取更详细的目标信息,使其逐步达到目标识别和检测的要求。随着SAR技术的日益迅速发展,如何获得高分辨、高质量SAR成像结果成为SAR成像领域的研究热点[28]。在“十二五”期间,我国就制定了“高分辨对地观测系统”等重大专项。机动SAR平台运动轨迹复杂多样,不仅存在非均匀采样的问题,还存在高阶频谱相位的问题,运动补偿较为复杂,成像要求更高。因此,研究快速高分辨机动SAR成像,对于SAR平台的实时侦察和打击任务至关重要。其中,步进频SAR是提高分辨率的一个有效方式。
2.4 其他机动SAR成像
大斜视和前视SAR能够远距离成像,为弹载和机载平台提供更多攻击准备时间。大斜视、非匀速直线运动SAR成像算法一直是弹载SAR领域最核心的内容。也是机动SAR成像的重点方向。大斜视SAR成像存在严重的距离方位耦合,机动SAR给大斜视带来了更大的方位空变性和距离徙动,其二维频谱更为复杂,多普勒中心空变量更大,图像散焦更加严重,更不适合于大宽幅、长孔径成像。因此,为保证攻击平台获取更多的目标提前信息,研究大斜视/前视、大宽幅和长孔径SAR也是机动SAR发展的重要方向之一。
此外,机动SAR在小型化、三维成像能力、新体制和硬件等方向的发展也值得关注。结合圆迹SAR和曲线SAR的发展,提高机动SAR的三维分辨能力,能够增加高度维对目标的分辨能力,也是目标识别与检测的发展趋势。新体制和硬件的发展,能够提高机动SAR的适应能力和成像效果。
3 结论
从作战要求角度考虑,战场生存能力、信息获取能力、信息获取质量、信息获取维度和信息智能化处理,是SAR发展的必然方向。转换到技术领域,战场生存能力对SAR应用的发展提出了快速、实时以及多作战模式、灵活机动的要求,对SAR硬件平台提出了隐蔽性、小型化、轻型化、无人化的发展要求;信息获取能力则要求SAR向着大宽幅、大场景和抗干扰的方向发展;信息获取质量则要求SAR向着高分辨、超分辨的方向发展;信息获取维度则要求SAR向着多角度以及三维成像的方向发展;信息智能化处理则是对SAR图像的目标分类、目标识别以及SAR图像与光学图像、智能信息融合发展的要求。因此,未来SAR的发展必将由“平台适应型”向“适应平台型”转变,也更加智能、高效。
猜你喜欢
出版人(2022年8期)2022-08-23
考试与评价·高二版(2021年1期)2021-09-10
英语文摘(2020年6期)2020-09-21
当代陕西(2019年12期)2019-07-12
汉语世界(The World of Chinese)(2019年1期)2019-03-18
Coco薇(2017年9期)2017-09-07
Coco薇(2015年10期)2015-10-19
科普童话·百科探秘(2014年9期)2014-09-16
小朋友·快乐手工(2014年4期)2014-08-16
时尚内衣(2013年4期)2013-06-18
