
基于滑模变的汽车横摆力矩控制研究
2019-11-29 06:57杜显晖
汽车实用技术 2019年22期
杜显晖
(江铃股份有限公司车架厂,江西 南昌 330000)
引言
近年来,基于横摆力矩控制的汽车稳定性研究越来越受到学者们的重视。横摆力矩的控制性能好坏直接影响到汽车驾驶的稳定性和平顺性。针对上述问题,学者们提供了各种汽车横摆力矩的控制策略。经典的方法有PID 控制、模糊控制、最优控制和滑模变控制等。其中,滑模变结构控制具有较强的鲁棒性和抗干扰性,特别适合于非线性系统的控制。由于汽车具有非线性的特性和外部具有多种干扰,故采用滑模变控制器来对汽车的横摆力矩进行控制是非常合适的。本文使用滑模变控制器对汽车的横摆力矩进行控制,首先介绍了滑模变控制器的基本原理,再在汽车系统动力学模型的基础上,使用滑模变控制器对汽车的横摆力矩进行控制,最后用汽车系统动力学仿真软件carsim 对基于滑模变控制的汽车横摆力矩进行动力学仿真,仿真结果证明了本文方法的有效性。
1 滑模控制的原理
设某非线性系统的动力学方程为:

其中,x为状态变量。
(1)通常点——如图中A 点所示(2)起始点——如图中B 点所示(3)终止点——如图中C 点所示。其中C 点即终止点在滑模变控制中为关键点。并称在切换面s=0 上所有终止点的区域为滑动模态区,简称为滑模运动。
当只有在切换面上的点全是终止点时才能使用滑模控制,则在切换面s(x)=0 附近时,有:

式(2)为滑动模态存在的条件。
如果系统的某一点再离切换面很远处,处在状态空间的任何一个地方,滑模面必须要能将所有切换面外的状态点都吸引进入切换面,所以滑动模态的全局到达条件如式(3)所示,其中x可为任意值:

基于式(1)~(3),定义滑模函数:

在切换函数如下所示:

控制函数可写为:

2 基于横摆力矩稳定性的滑模控制器的设计
汽车是一种机械结构负载的强耦合非线性系统,在汽车运行过程中,不大可能将所有的物理量都计算出来,只能选取较为关键的量进行控制。其中,横向运动和侧向运动对汽车稳定性的影响较大,汽车在横向运动时会产生侧偏的横向角度,如果横向侧偏角度过大,汽车就会发生翻车的危险。同样,当汽车的发生了纵向运动并且偏离目标值太大,汽车就会产生质心侧偏角。如果汽车的质心侧偏角也过大,那么同样会影响车辆的正常行驶。综上所述,将汽车的横摆侧偏角和质心侧偏角作为控制目标,使用滑模变控制器对汽车的整车动力学特性进行控制。
基于汽车横摆力矩稳定控制的滑模控制器的步骤为:首先建立整车理想模型,整车理想模型中的输入为车轮转角δ以及整车车速u,输出为质心侧偏角β以及横摆角速度γ;滑膜控制器的输入信号是β'与β之间的误差信号,记为(β'-β)、以及γ'与γ之间的误差信号,记为(γ'-γ),输出信号是是整车的横摆力矩Mz。当横摆力矩计算完毕后,根据横摆力矩进行转矩分配,从而保证汽车可以稳定的驾驶。
滑模控制器的切换面为:

对切换面s求导:


则汽车的横向动力学方程为:

可写成:

最终可得横摆力矩Mz应设置为:

3 仿真结果分析

图1 车辆转弯行驶的方向盘转角

图2 车辆转弯时的车轮转角
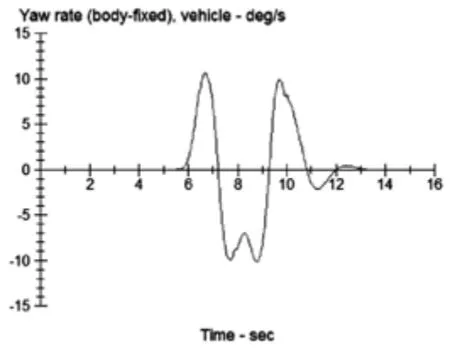
图3 车辆转弯时的横摆角速度
使用汽车系统动力学软件carsim 进行上述理论的仿真。仿真参数设置为:汽车的总质量为789 公斤,车轮半径R为0.292 米,汽车质心与前轴的轴距1.103 米,汽车质心与后轴的轴距1.244 米,汽车质心高度0.54 米,弹簧承载的质量747公斤。
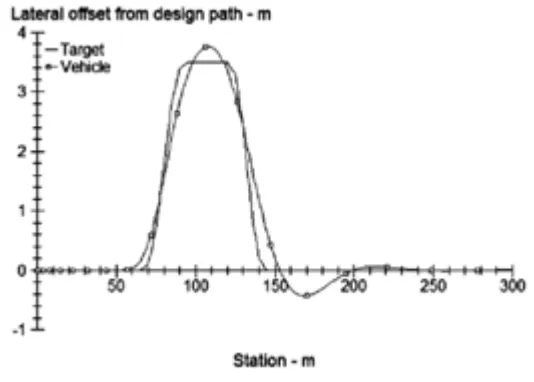
图4 车辆双移线实验时的行驶轨迹
图1 、图2 和图3 分为转矩分配系统控制的情况下车辆转弯行驶的方向盘转角、车轮转角和横摆角速度的变化曲线。图4 为车辆双移线实验时的行驶轨迹。可以看到,使用滑模变控制器可以对汽车横摆力矩进行有效的控制,从而保证了整车转向时的稳定性。
4 结论
本文使用滑模变控制器对汽车的横摆力矩进行控制,从而保证了整车行驶的稳定性。介绍了滑膜变控制器的基本理论,设计了基于横摆力矩稳定性的滑膜变控制器,并在汽车系统动力学软件carsim 上进行了仿真,仿真结果证明了本文方法的有效性。
猜你喜欢
汽车实用技术(2022年14期)2022-07-30
舰船科学技术(2022年10期)2022-06-17
北京航空航天大学学报(2021年4期)2021-11-24
杭州电子科技大学学报(自然科学版)(2021年1期)2021-03-17
湖南工业大学学报(2021年1期)2021-01-13
新课程·中学(2019年7期)2019-09-17
电子技术与软件工程(2019年8期)2019-07-16
中学生数理化·教与学(2019年5期)2019-06-06
物理教学探讨(2018年1期)2018-02-13
中学生数理化·高考版(2008年2期)2008-11-01
