基于无人机的封闭煤场体积测量系统设计
2019-11-26 07:59:14蔡文霞
石家庄学院学报 2019年6期
蔡文霞
(石家庄学院 机电学院,河北 石家庄 050035)
0 引言
传统的料场盘料采用拉皮尺的方法,测量料场的长度、宽度及高度,以此计算料场的体积,该方法有较大的误差,并且工作量较为繁重,长时间在恶劣的工况下作业对测试人员的身体健康造成了较大的影响.后续有便携式盘料仪器出现,该方式需要在不同位置进行打点,然后再进行数据的拼接,经常会出现料场拼接不全的现象,并且点数较少也影响了测量的精度.另外,国家对环保越来越重视,有颗粒、粉尘等污染环境的料场都要求采取封闭的作业形式.
随着人工智能概念的提出,越来越多的前沿技术在工况较为恶劣的场景应用需求极为迫切[1].目前,无人机平台稳定性已有较大提高、激光雷达传感器精度也有提升,无人机搭载激光扫描仪盘料技术孕育而生.提出了基于无人机搭载激光扫描仪的封闭煤场的体积测量系统的设计,目的是解决无人机在封闭棚内飞行,测量煤场内煤堆的体积,极大解放测试人员的工作强度;该系统实时对料场进行全局建图,极大地缩短了料场盘点的时间,提升了料场的工作效率.
1 盘煤方案设计与煤场数学模型建立
1.1 封闭煤场体积测量基本理论
封闭煤场测量储煤量时,要提前获取煤堆的体积,然后再用体积乘上损耗,便可计算得出煤场的整体储煤量是多少.在测量煤堆体积之前,要结合煤场大小以及损耗情况在煤场建立空间立体坐标系,使用激光盘煤系统获取坐标系.该方法成为“点云”.在获取坐标系之后,剔除坏点,进行滤波,采取适当网格,把散乱的“点云”坐标组织重建,以此来建立煤场三维立体模型.此时,煤场可被分割为多个体积单位,再通过这些单位进行积分,便可获取整个煤场的储煤体积总量.
坐标系是联系现实物体三维特征与数据的纽带,所以,坐标系的建立是数据采集的基础.该系统采用无人机激光扫描仪对煤堆进行盘点作业,其中无人机采用的是GPS/INS导航组合系统,坐标系的选取为ENU(local Cartesian coordinates coordinate system,东-北-天坐标).整体设计思路为:结合煤场储煤分布,将之看成一个矩形,取4个顶点为原点.此时,为有效减少计算量,煤场坐标与无人机坐标都使用ENU,促使两者吻合,并且选振动为X轴,选正北为Y轴,选与地面垂直线为Z轴.
建立完坐标轴后,无人机按照预定航行在煤堆上空飞行.扫描图如图1所示.其中扫描平面为一个工作周期内的激光扫描仪工作平面,姿态角为ENU夹角,扫描中心线为利用激光扫描仪的位置中点,垂直于无人机的直线,扫描角度为激光扫描线偏离扫描中心线的角度,特征点距为从激光扫描中心到煤堆表面的直线距离.
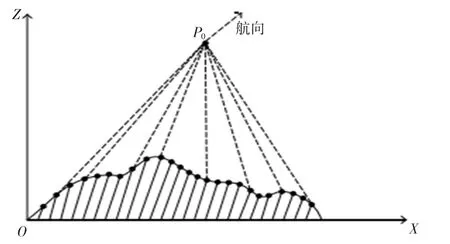
图1 无人机煤堆上空飞行扫描图
若差分定位检测遥感投影中心是P0(X0,Y0,Z0),那么惯性测量单元所检测的参数则为(φ,ω,κ),此时,激光扫描仪到煤堆表面的坐标就是P1(X1,Y1,Z1),目标点与遥感投影中心的矢量单位是S→,S→=P→0P1=(△XS,△YS,△ZS),且距离是|s→|,激光扫描仪角度是θ.经过P0(X0,Y0,Z0)点的检测参数(X0,Y0,Z0,φ,ω,κ,|S→|,θ),可得出煤堆表面P1的坐标点,如图2所示.
若煤堆表面三维坐标系为:X1=X0△XS,Y1=Y0△YS,Z1=Z0△ZS,计算过程为:

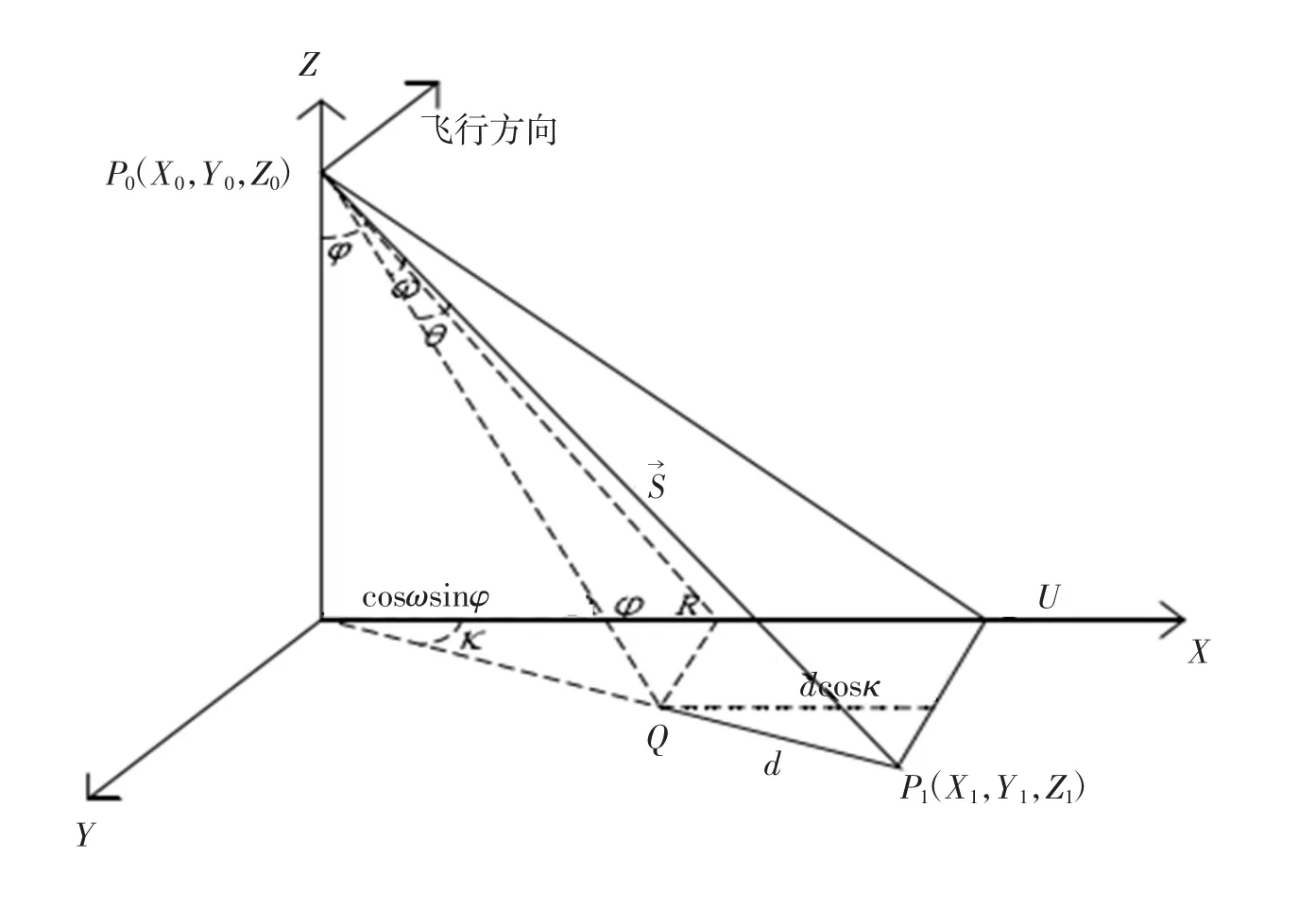
图2 煤堆表面P1点的坐标计算图

最终得出:

1.2 模型建立
1.2.1 煤场体积计算模型中的规则网格表建模
该建模方法[2]是将数字高程模型(DEM)作为高程矩阵来表示,数据则来源于矩形格采样点,亦或来源于不规则离散数据采样点.该方法相对简单,且计算矩阵较为容易,通过形体裁剪碰撞检测可得出示意图,如图3所示.
1.2.2 分块区域算法实现
无人机飞行航线一般为平行线,相邻航线距离为激光扫描仪的一个扫描周期范围内.因为系统在检测中会受到地理位置与时间的影响,所以在进行数据处理的时候,便可把这些数据按照测量的先后顺序进行分块处理.为方便后期处理,可将煤场区分为几个区域,让无人机从区域中心飞过,如图4所示.
在区域分块算法(图5)的基础上,求得煤场三维坐标,结合测量所得数据与位置信息,把目标点划分到不同区域中.这样可以有效避免传统算法的资源浪费与规模限制,还能提高数据处理的效率.
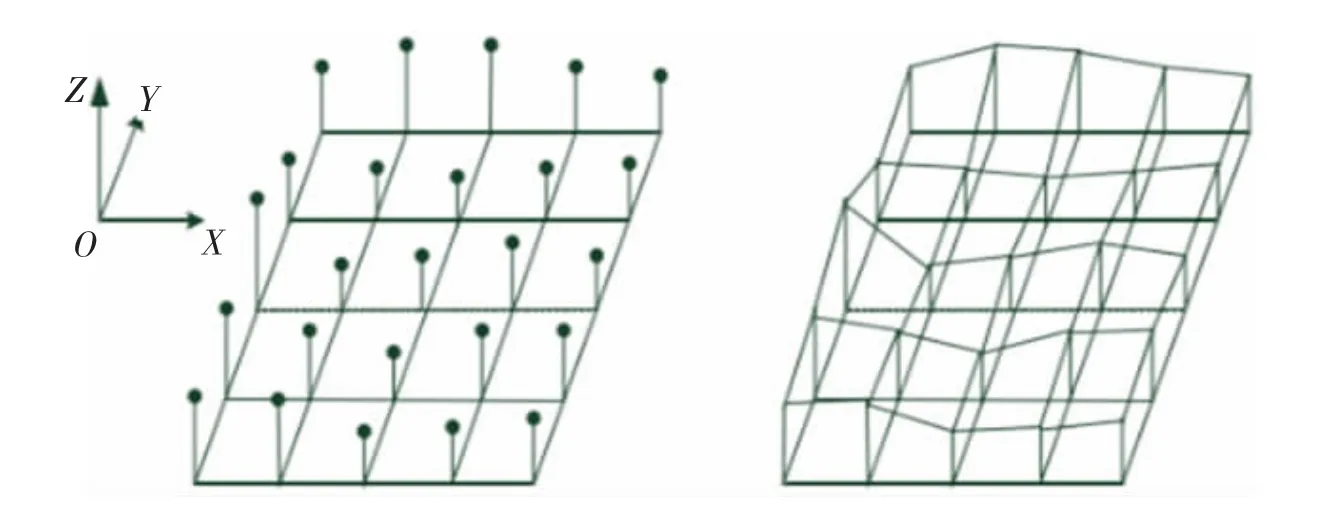
图3 煤场体积计算模型示意图
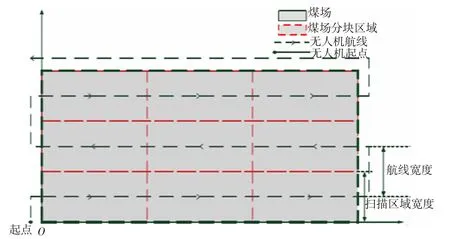
图4 无人机在煤场分块区域飞行示意图
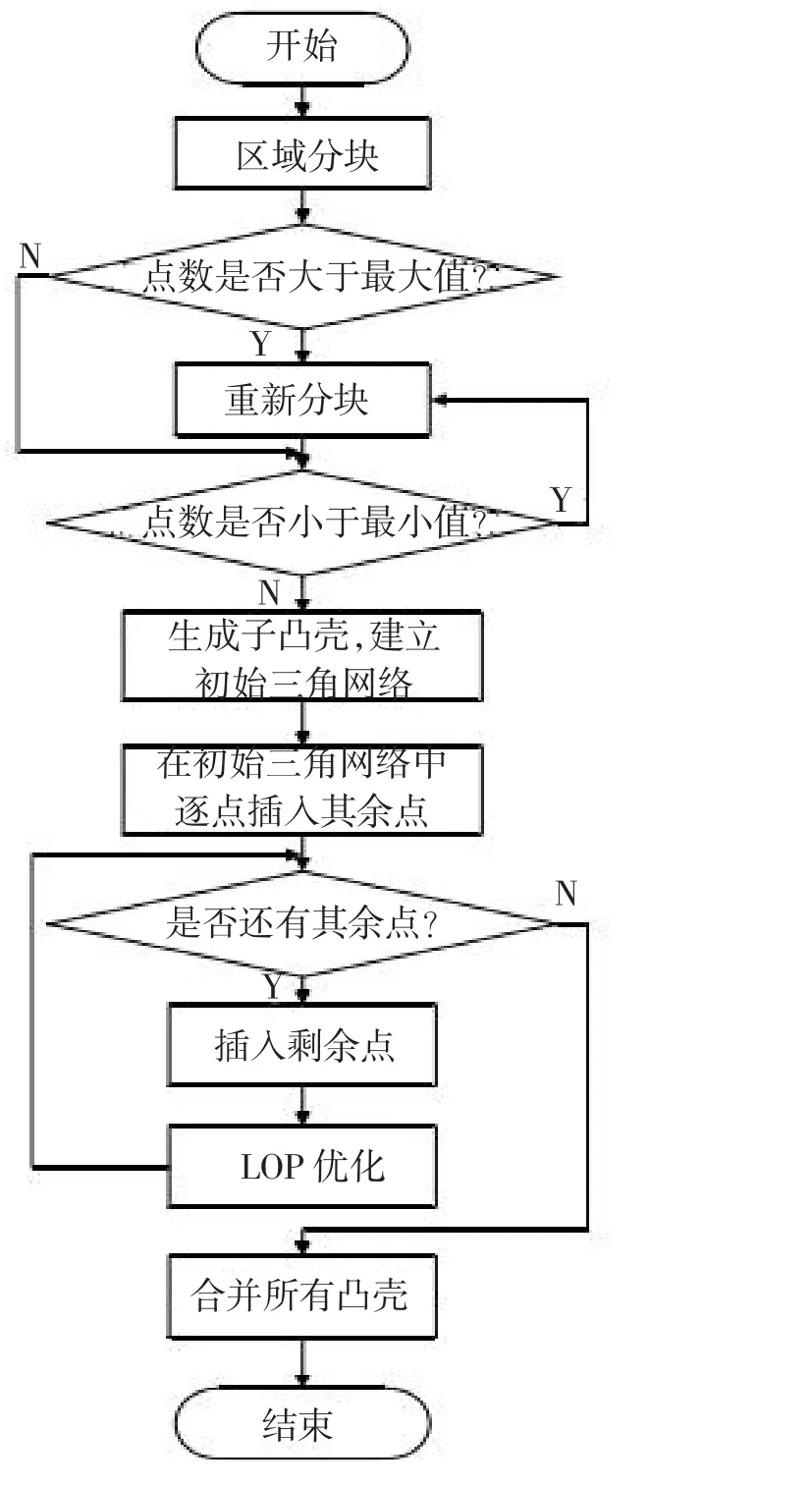
图5 块区域的算法实现
在进行数据测量时,系统会把测量信息实时传递给处理系统.地面站数据处理系统会根据数据元素进行分块处理.为促进效率,分块方式一般为四边形,每个四边形中利用Delaunay三角剖分算法生成网格,然后将之合并,实现数据计算.算法为:以无人机航线为准,且分块对称.若煤场数据点集是P,某一子集是Pi,某一数据点在XY平面的投影坐标是(X,Y),子集Pi含点数最小值是Pmin,最大值为Pmax,且由确定.把离散点集P切分成点数相近的i个子集P(ii=1,2,3…,n).以此确定方块数量:

结合数据区域的划分特点建立凸壳,要保证凸壳是多边形,保证含有Pi所有点.并且要将点中含有x,y,x+y,x-y的最小值与最大值进行相连,再通过递归过程将相邻两点上凸壳的其他点找到.通过最小值与最大值点的寻找,边界点会出现 Ai,Bi,Ci,Di,Ei,Fi,Gi,Hi,将之相连,便是凸壳 L1,如图 6 所示.
2 基于无人机的封闭煤场体积测量整体设计
2.1 Pixhawk飞控板
飞控板是整个系统的核心装置.其中主要设备有:陀螺仪、气压计、微型处理器、磁力表、导航组件等.飞控板的主要作用是调动无人机的飞行、降落、巡航与导航等.该系统所选用的飞控板为Pixhawk.其具体性能为:由两块32位微型处理器构成,主控制器STM32F427,以及故障保护器STM32F103,在作业时,主控器可对无人机进行调动,当出现故障后,可由故障保护器进行手动恢复.系统惯性测量由3轴16位ST MicroL3GD20H陀螺仪以及3轴14位磁力表与加速度计构成,以此来确保无人机的飞行稳定性,同时为保证无人机获取数据时的进度,方便后期计算煤堆三维坐标.该飞控板可实现接口扩展,便于二次开发.在外置MicroUSB接口中,可进行程序下载和参数调控.串口UART4,可用于信息数据的命令请求,因此来获得无人机飞行信息与位置.辅助通道#5与#6可发送脉冲信息,实现对煤场数据检测的启停功能.FutabaS.BUS接口可用于控制无人机的飞行方式,GPS接口可为无人机提供相应的导航信息.
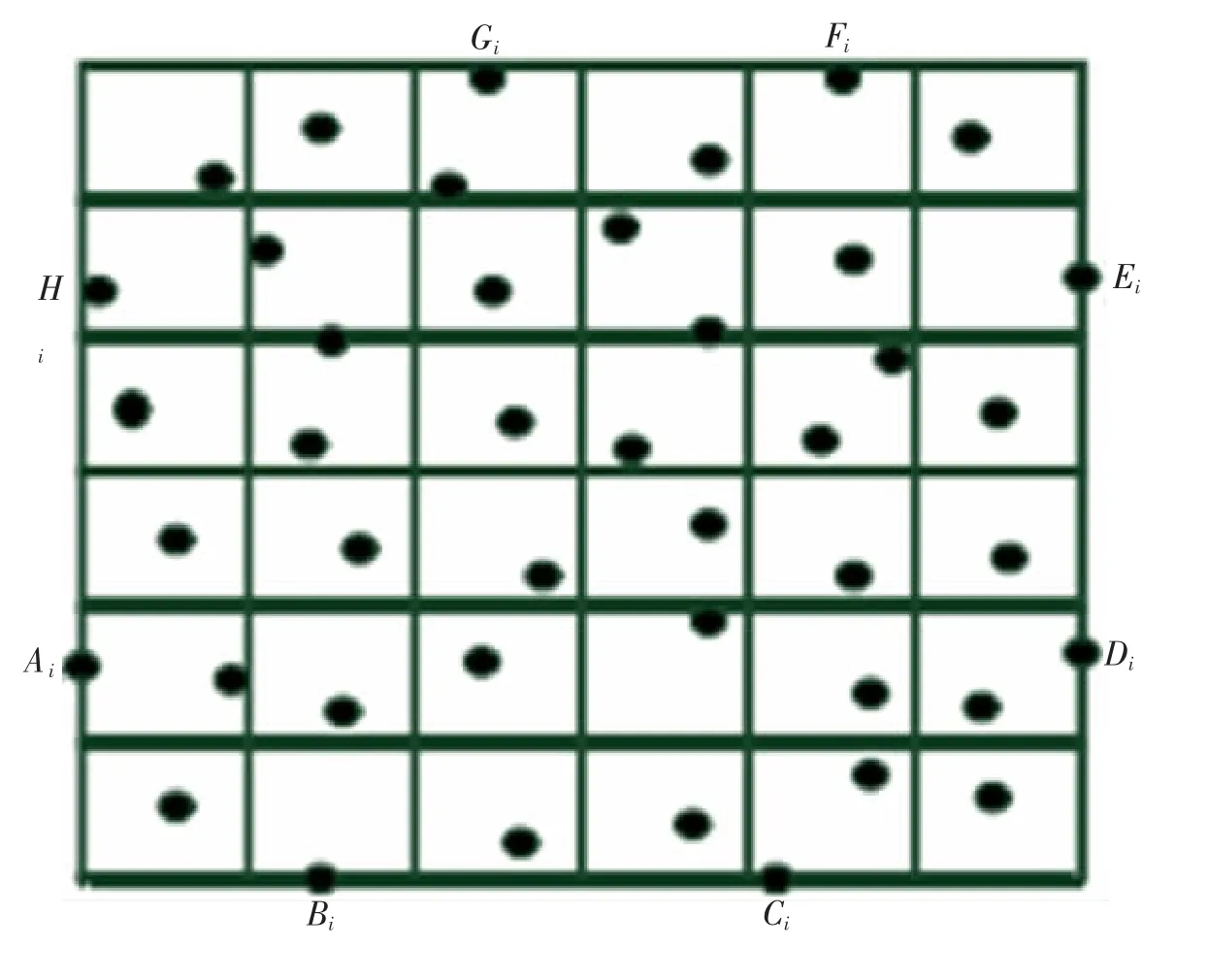
图6 凸壳建立示意图
2.2 激光扫描仪
激光扫描仪又分为线扫描与点扫描.线扫描激光扫描仪的结构相对简单,并且方便控制,但是效果不是非常理想,有功率分散的缺点,而且边缘和死角难以确定.所以,该系统使用的是点扫描激光扫描仪.同时,因为激光测距的精度会受到物体反射而产生偏差,在此就要求作业途中扫描仪要与煤堆表面保持一定距离.结合实际进行分析,在封闭煤场中,大部分设计一般为5~8 m.根据无人机的功率和负荷,该系统采用UST-20LX二维激光雷达进行模块测量,UST-20LX二维激光测量范围为20 m,测量角度为270°.通过Ethernet通信协议可实现能耗降低、精度提高的效果.
2.3 差分定位系统
差分定位是为无人机提供导航信息的组件.随着卫星定位技术的成熟,GPS/BD双差分定位系统[3]受到了广大人群的青睐,它具有定位精度高、环境适应力强的特点,而且还能满足基本的测绘需求.差分定位系统主要区分为两部分,分别是地面基站部分与移动端部分.该系统移动端采用的是K505GNSS五频卡板,输出功率为5 Hz;地面基站采用的是T300 GNSS接收机,输出功率为10 Hz.差分定位系统可实现厘米范围内的精准定位效果,完全可以满足封闭煤场的盘煤作业计划.
2.4 GPRS无线传输
GPRS是一种高速无线通信技术的代称.虽然当前GPRS已经不属于高精尖技术范围,但是其运营成本低廉,效果显著,且后期维护与保养简单,一直是无线传输领域内的佼佼者.该系统所使用的GPRS无线传输为USR-GM3模块,该模块可与数据采集系统机械能组合,波特率范围是2 400~921 600 bps,默认值为115 200 bps.从正常角度来看,速度上行可以达到42.8 bps,速度下行可以达到85.6 bps,基本可实现数据传输的各种要求.其工作特征为:在-25~85℃可正常作业,这一点便满足了对不良环境的克制,且其本身电源功能强大,在不同环境下进行作业,所消耗的电能也不同.正常工作电压为直流3.4~4.2 V,作业电流平均值为55~90 mA,最大可达到750 mA,而待机时间内,可控制在6 mA以内,睡眠状态可控制在2 mA左右.同时,还支持TCP/UDP,该模块含有TCP/IP以及PPP的传输协议,可进行数据传输,且为透明化,这样方便了系统的开发与后期的实际应用.
2.5 数据采集系统控制器
该控制器的功能是用来实现任务调度、模块通信以及数据储存与发送.该系统使用ARM Cotex-M4啮合的STM32F4芯片STM32F104ZGT6,该芯片拥有192 kb静态随机存取存储器、1 024 kb闪存,以及两个32位的定时器,12个16位的定时器,一个10/100 M的控制器,频率可达168 MHz,能够满足三维体积模型的数据传输控制的需求.
3 结论
本研究结合了无人机的自动巡航功能以及激光检测技术的应用和“点云”数据的三维构建手法,完成了以无人机为载体的封闭煤场体积测量设计方案.这一方案可有效解决当前封闭煤场盘煤系统中出现的问题,大大缩短了工作的周期,提高了工作的效率,降低了工作的难度.
猜你喜欢
昆钢科技(2022年4期)2022-12-30 11:24:04
山东冶金(2022年1期)2022-04-19 13:40:44
湖南水利水电(2021年6期)2022-01-18 06:07:16
能源工程(2021年2期)2021-07-21 08:39:48
河南工程学院学报(自然科学版)(2021年2期)2021-07-03 05:56:02
中国工人(2020年5期)2020-11-17 12:38:21
矿业安全与环保(2020年5期)2020-11-03 13:00:22
电站辅机(2017年3期)2018-01-31 01:46:44
动漫星空(兴趣百科)(2017年3期)2017-11-07 01:15:00
电站辅机(2016年4期)2016-05-17 03:52:42