
控制类在线开放实验课程的设计实现
2019-11-26 07:29赵林惠赵翔康戴亚平
实验室研究与探索 2019年10期
赵林惠, 王 园,, 赵翔康,, 戴亚平
(1.北京市智能机械创新设计服务工程技术研究中心,北京 100020;2.北京理工大学 自动化学院,北京 100081)
0 引 言
随着互联网的发展,网络化实验教学在世界范围内引起了广泛的重视。日本东京工科大学Yasuhiro等人早在1999年就完成了针对控制工程的网络化实验系统的搭建,2001年悉尼科技大学David Lowe等[1]建立了远程控制实验室。在国内,刘萍先等[2]构建了网络控制虚拟实验室,学生通过Internet可以完成倒立摆和水箱控制的实验,通过虚拟实验系统开发和验证智能控制算法;Dai等[3]在2006年提出了混合架构的网络资源共享和远程控制实验室,实现了一些复杂非线性系统的控制实验,包括球杆系统,单自由度机械臂系统,直升机和倒立摆系统等,学生可以通过PC端进行传统PID控制和各类智能控制算法控制下位机的非线性硬件系统进行实验。虽然针对互联网进行网络化控制实验的技术已经得到了实用性进展,却因为学生依然不得不依靠电脑上网完成实验,使得网络化实验教学依然不能够做到“随时”“随地”与“便携式”,这在移动互联网时代,与充分利用碎片化时间进行学习的需求是不相符合的。
2015年,国务院发布了关于积极推进“互联网+”行动的指导意见,推动“互联网+”高等教育教学改革一直受到教育部门的充分重视。高校教改的主要目标就是培养学生的创新意识与动手能力[4]。当今教育领域最热门的改革当属网络在线学习平台MOOC的兴起,但很容易发现,MOOC的课程入学率高,辍学率却同样高。尤其是针对自动化专业这样的工科学生,仅仅有理论课件,没有提供其动手实践的实验课程,很容易让学生产生“隔靴搔痒”之感。如果仅仅给学生提供线上视频理论课程的教学,学习者很难坚持完成全课程的学习。目前MOOC平台上与自动化学科相似的工程类课程配套的实验课程寥寥无几,在全国大学MOOC平台上仅有国防科学技术大学针对大学物理实验课程搭建了虚拟的实验系统[5]。因此,开发远程端MOOC实验教学系统,对于在线理论课程的辅助教学方面具有非常重要的意义[6-7]。
目前全国大学MOOC在线课程大约有740门,其中需要实验的课程有230余门。在这些在线课程中,实验部分仅仅是理论教学的一部分,成绩占到10%~50%不等,课程还是以理论教学为主,并没有让学生参与动手的实验课程。在线的独立实验课程只有11条结果,仅占总课程的1.4%,包括生物、化学、物理、数学、计算机和电子电路学科,在这11门实验课程中,几乎全是采用虚拟仿真软件进行实验,没有实物硬件设备实验。因此,如何把实物实验传送到互联网,允许学生“随时”“随地”与“便携式”地进行远程实验操作,成为控制学科附有挑战性的科研课题[8]。
移动互联网时代的到来,深刻影响、改变着传统的生活,人们对手机的要求已不局限于发信息和通电话功能。截至2016年2月,中国网民规模达6.88亿人,其中学生群体的占比最高,为25.2%,基本上99%的学生使用智能手机。针对90后大学生对新兴事物具有较高的敏锐性,将手机移动互联应用于实验教学不仅能够提高学生对实验课学习的兴趣,在培养其自主学习能力方面更是意义非凡。
本文探讨基于手机、平板电脑移动互联的远程控制实验(Mobile Remote Control Experiment,MRC-Experiment)教学系统,将实验课程也制作成MOOC网络公开课程,并允许学生通过移动端登录本实验教学系统进行远程在线实验,而现在的MOOC网站也都有自己的移动端,因此,学生都可以通过移动端进行在线课程学习与在线远程实验操作。在实验过程中,学生能够观察到响应曲线、控制指标与控制效果。教师可以利用在线民意测验的结果来判定学生对于课程的满意度,进行实验教学效果分析[9]。
本文的主要工作有:①提出移动实验室(M-Lab)的设计原理,选择主流的Hybrid APP架构。采用单自由度机械臂为被控对象,完成在线的实验课程内容设计。②运用智能控制算法(遗传PID)进行实验在线课程的设计与实现;运用Matlab仿真结果与M-Lab的实物实验结果对比,验证在线实验系统的可行性。③对M-Lab实验效果调查与分析,对满意度归纳总结。
1 M-Lab设计原理
1.1 M-Lab的内涵
如果要实现一个基于移动互联网的实验室,最重要的技术是允许手机登录实验室,进行网络化的控制实验,故提出了M-Lab的概念,在M-lab方式下进行的控制类实验,称为MRC-Experiment。
(1) M-Lab的构成与工作原理。在互联网环境下,建立起网络数据的通信传输机制,允许用户使用手机以及移动设备远程登录网络化实验室页面。在用户的手机端可以远程操作实验室的实验设备,进行控制实验。该实验室可以提供实验结果数据,经过移动互联网媒介反馈给用户。
移动实验室的构成如图1所示。
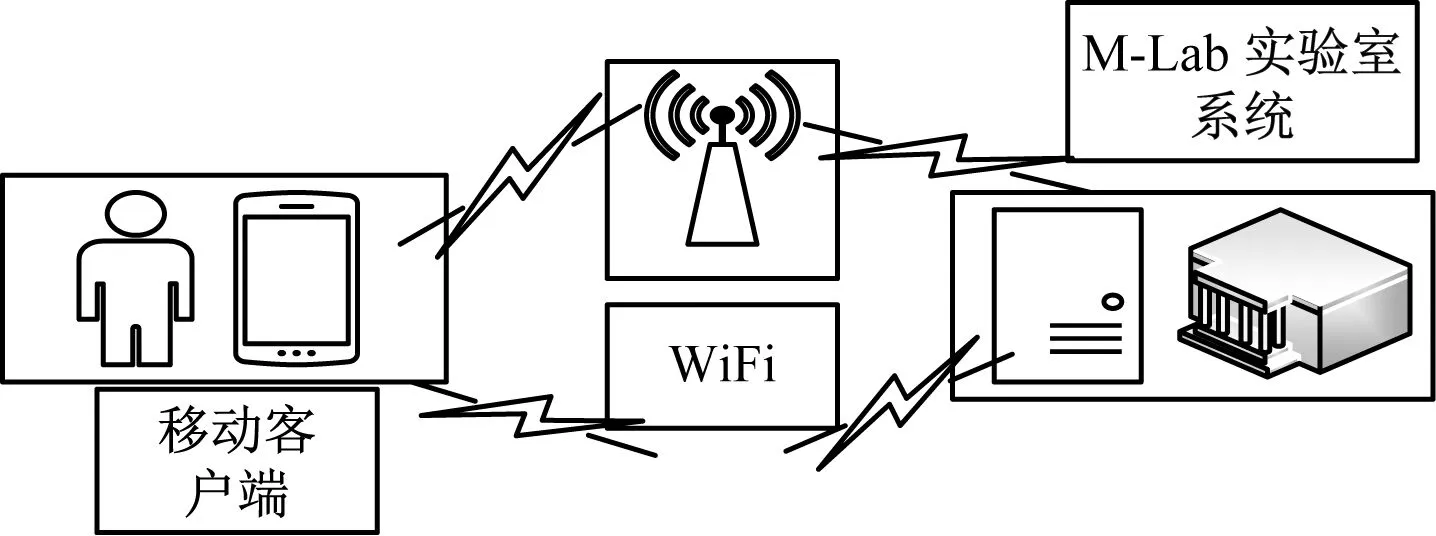
图1 用户与实验室关系图
(2) MRC-Experiment的工作原理。用户可以通过移动终端设备(手机,平板电脑)进行的工程实验称为移动实验。在MRC-Experiment中,用户可以通过无线网远程控制被控对象,不仅可以改变实验参数,也可以上传自己的控制算法,实验后在线获得实验数据与实验曲线,MRC-Experiment的工作原理图见图2。
1.2 M-Lab的技术实现
1.2.1 M-Lab网络架构设计
移动端实验平台是建立在学生移动智能设备上的控制终端APP,目前可选的结构有:Native APP、Web APP、Hybrid APP,3种结构对比见表1。
由表1可知,选取Hybrid APP为移动端实验平台设计结构,从而兼具“一次开发、多平台运行”的能力与调取底层设备的能力,可以降低开发成本,同时具有良好的扩展性能与维护性能。

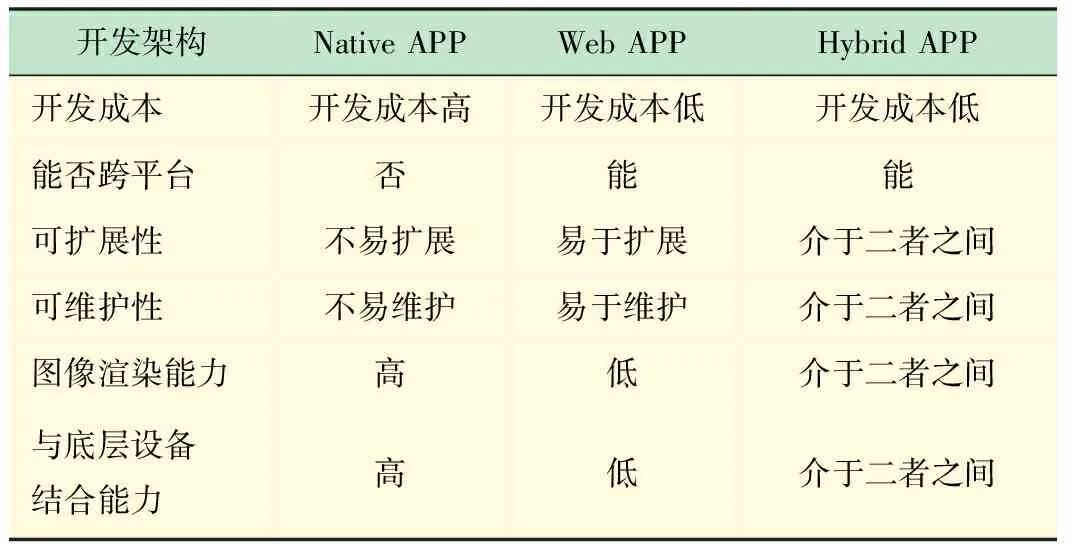
图2 移动远程控制实验的工作原理图
作为移动端实验平台,其核心是实验功能,辅之以信息管理功能,所以图像渲染并非其主要考虑因素,故不对图像渲染能力做过高要求,Hybrid APP能够提供的图像渲染能力已足够。因此移动实验室的框架搭建,选择Hybrid APP架构来完成。
1.2.2 被控对象的选择
针对控制实验的倒立摆、恒温箱、机械臂等装置,都可以连接到本文设计的实验平台上,为了节省成本,使用自动化学院远程控制实验室的产品——单自由度机械臂为被控对象[10],如图3所示。

图3 单自由度机械臂实物图
单自由度机械臂的特色:
(1) 是一个典型的二阶系统,可以进行各种控制类算法的实验。
(2) 易于携带,可以作为教师在教室的实验演示设备,并允许学生在任何互联网覆盖的地方登录到移动端远程控制实验室,对该被控对象进行控制实验。
1.3 MOOC平台的控制实验课程内容设计
基于自动控制理论的MOOC实验课程,包括预备知识、经典控制算法、智能控制算法及算法设计等多个章节的课程内容,经典控制算法适应于本科生教学,智能控制算法适应于研究生教学,为了加强学生基于实验课程的应用型教学[11],课程内容以算法应用为主进行讲解,以此提高学生的学习效率。
本系统下MOOC课程内容的设计方案如图4所示。
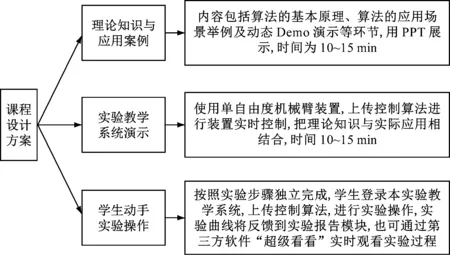
图4 MOOC平台的实验课程内容设计方案
1.4 移动远程控制实验室的设计与实现
在移动互联网环境下,运用标准Java接口与HTTP网络通信机制,开发了一套基于移动端的APP实验教学软件系统(M-Lab APP),以Web形式展示。用户的手机端(或者平板电脑等移动设备)可下载APP软件,远程操作实验室的实验设备,进行控制实验。M-Lab拥有数据库,用来保存用户的实验结果数据,可通过APP实验报告模块将实验结果反馈给用户。为了加强用户的真实体验感,加入了视频监控设计,通过摄像头实时采集实验过程,用户通过登录一款第三方“超级看看APP”软件,可以实时观看实验的动态过程。
移动端远程控制实验室的组成如图5所示。
2 智能控制算法(遗传PID)的在线实验课程的设计实践
使用了一种智能控制方法——遗传PID算法,来展示一套在线实验课程(MOOC)的设计与实现。
2.1 遗传PID的实验教学理念与课程设计
首先要教给学生的是如何设计一套遗传PID控制器,理论教学内容中包含了遗传算法的基本概念:①初始化种群;②选择、交叉和变异;③适应度函数的构建;④将遗传算法与PID的结合。这4部分先用PPT给学生展示,并强调这几部分都是影响控制精度的重要因素。让学生思索,为什么这4部分会影响到控制精度。
在“选择”的实验课程中,主要解决以下几个知识点的教学与实验问题:①遗传算法如何进行“选择”?②什么是轮盘赌方法?③如何确定选择哪个个体?
选择操作只能选出种群中一些优秀的个体,并不能产生新的染色体,而“交叉”能够产生新的染色体。针对交叉的教学采用Matlab仿真的方式展示给学生,让学生理解遗传算法的交叉步骤[12-14]。交叉方式选择3点交叉,本文选用的每一个个体,代表着PID 3个控制参数,使用3点交叉,能够保证每个参数都能得到交叉。交叉后产生2个个体,随机选择1个个体保存下来。当交叉不执行的时候,保存适应值更高的父代个体,基于GA算法参数调整的PID控制系统如图6所示。
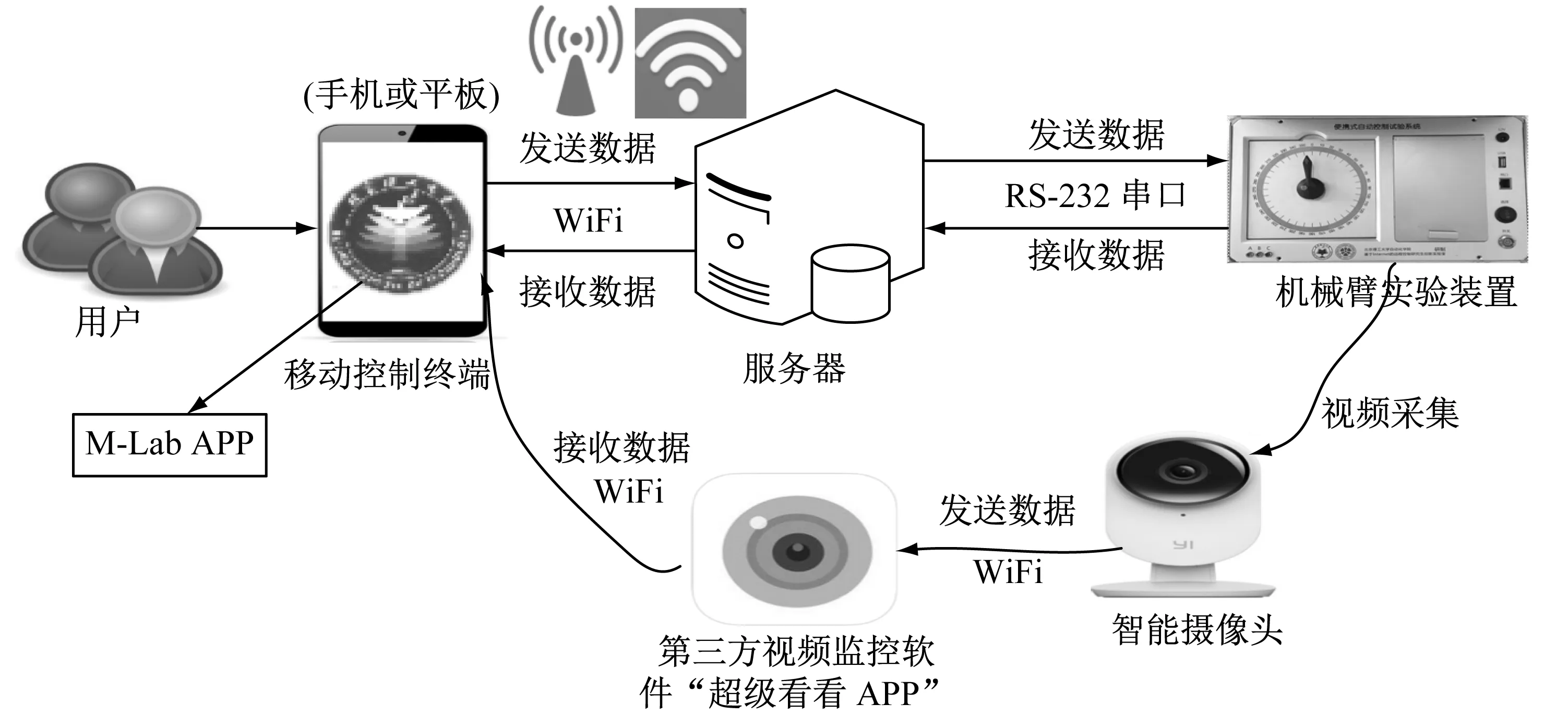
图5 M-Lab组成
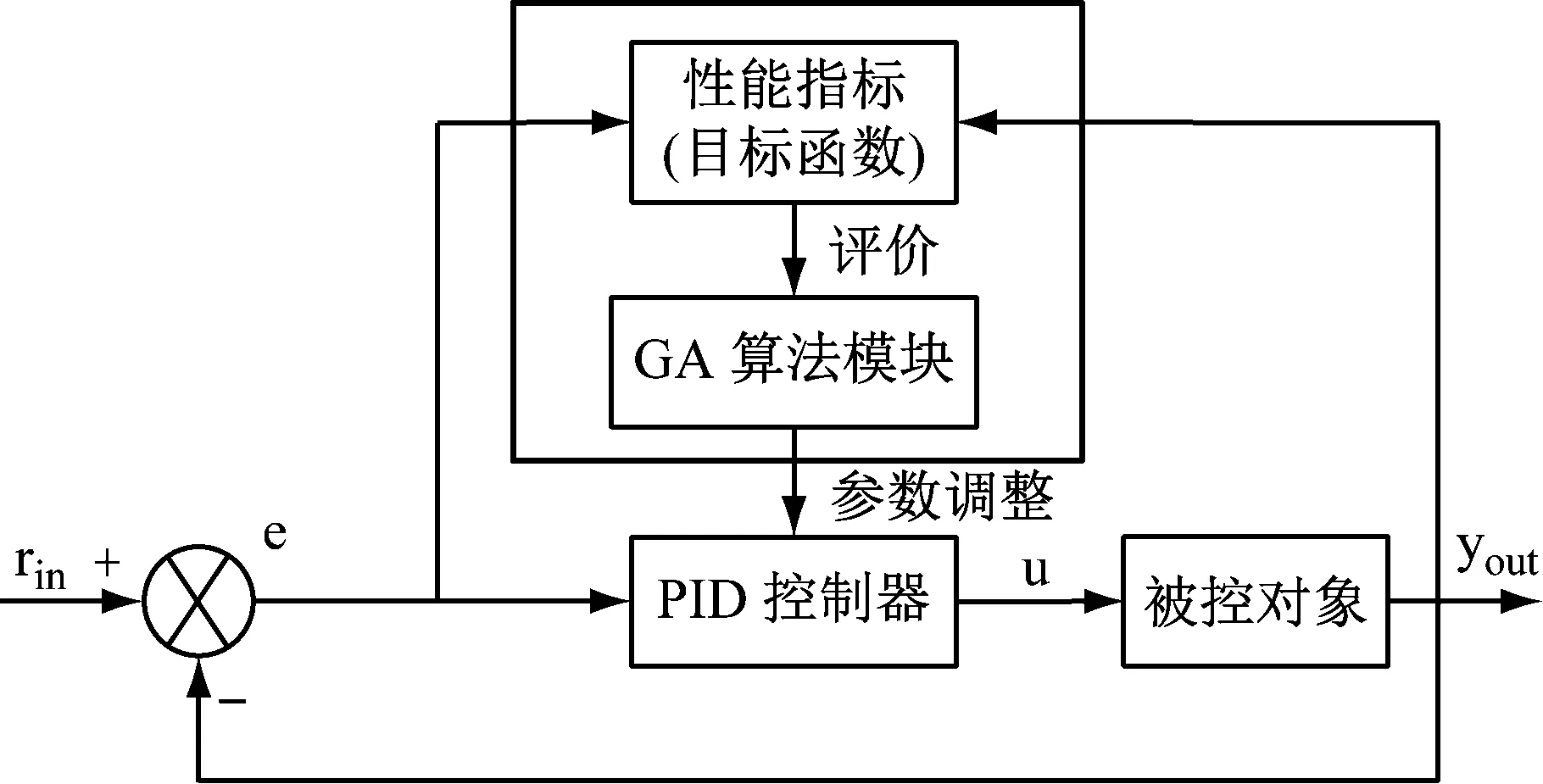
图6 基于GA算法参数调整的PID控制系统
为了获取满意的控制系统的过渡过程动态特性,采用误差绝对值时间积分性能指标作为目标函数,在目标函数中加入控制输入的平方项是为了防止控制量过大。目标函数越小,系统的控制性能越好。在实验中为避免超调,采用了遗传算法的处罚功能,将超调量作为最优指标的一项,目标函数为:
(1)
式中:e(t)为系统误差;u(t)为控制器输出;tu为上升时间;δ(t)为超调;w1,w2,w3,w4为加权值,其中w4>>w1。
目标函数的教学与实验,可以将权值作为实验参数,经过更改权值,获得最佳的目标函数。
在控制系统里,J值越小,对应的PID参数越优良,控制性能越好,由于遗传算法按照最大化方向进行搜索,GA算法用于求解最大值问题,所以适应度函数取目标函数的倒数,f=1/J。根据适应度和选择准则选出保留到下一代的个体,组成新的种群又作为算法的当前种群。
2.2 实验操作过程设计
把初始化、交叉、变异、适应度函数选取、遗传PID控制器设计4个部分提取出来,分别建立模快,让学生自己更改参数,来进行反复实验,以取得更好的控制效果,并且加深对遗传PID控制器设计的理解,遗传算法实验设计的流程示意图如图7所示。

图7 遗传算法实验的课程设计示意图
首先初始化种群,根据实验装置——单自由度机械臂的参数,推荐学生选择遗传算法的寻优区间为[0,10]。遗传代数为100,将种群规模定为30,个体基因序列长度为30,包含了3个控制参数,每个参数的基因长度为10,个体基因采用二进制编码,基因序列由0和1组成,在计算机中由round和random函数产生,round函数的功能为四舍五入,random函数的功能为产生一个0到1之间的随机数,基因组成个体,个体组成种群,个体数达到种群规模时,初始化结束[15-16]。
然后开始选择、交叉与变异的实验。①进行基于Matlab仿真确定最优参数的实验演示;②给出选择、交叉、变异过程中的图像化教学,形象地在实验MOOC中给出在哪一代得到了最优的PID参数以及目标函数J的值;③将最优的PID参数控制本实验系统的机械臂装置,与Matlab仿真结果进行对比。
为了获取满意的过渡过程动态特性,采用误差绝对值时间积分性能指标作为目标函数,在目标函数中加入控制输入的平方项是为了防止控制量过大。目标函数越小,系统的控制性能越好。在实验中为避免超调,推荐学生采用遗传算法的处罚功能,将超调量作为最优指标的一项,目标函数为:
(2)
式中:e(t)(e(t)<0)为系统误差,u(t)为控制器输出,tu为上升时间,δ(t)为超调。经过调试程序,权值取值如下:w1=0.999,w2=0.001,w3=2,w4=100。
遗传算法按照最大化方向进行搜索,适应度函数取目标函数的倒数,f=1/(J+1×10-10)。目标函数J+1×10-10是防止分母为零。根据适应度和选择准则选出保留到下一代的个体,组成新的种群作为算法的当前种群。
停止准则的设计:最优个体的适应度连续n代(n由学生实验中自行确定)未变,则终止实验。指导学生将算法一直执行求出最大的平均适应度,终止准则为进化子代的平均适应度接近或者比该最大平均适应度更大。
本实验系统选择最简单的迭代次数作为停止准则,经过测试,当迭代次数满足100次以后,目标函数几乎收敛到最小值,满足停止准则算法输出解码后的最优个体并结束。用Matlab得到最优参数的仿真结果——目标函数J随进化代数的变化曲线如图8所示;PID参数为最优值时,J=9.775,进化代数为100,PID最优参数时系统的阶跃响应如图9所示,再将最优的PID参数在实验系统上进行测试。
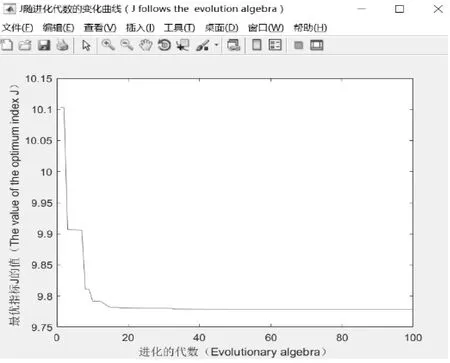
图8 目标函数J随进化代数的变化曲线
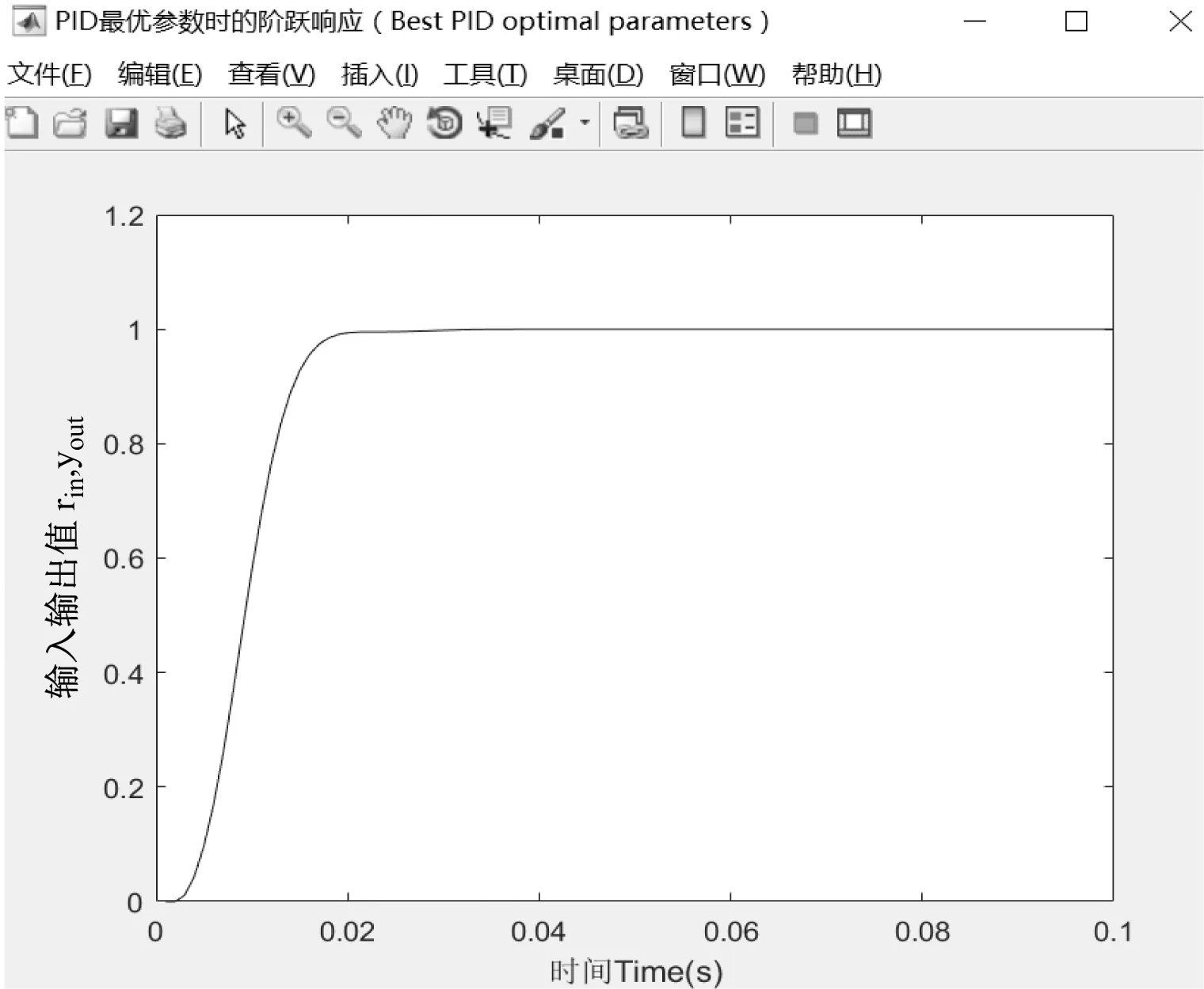
图9 PID最优参数时系统的阶跃响应
2.3 实验结果对比
2.3.1 Matlab仿真实验
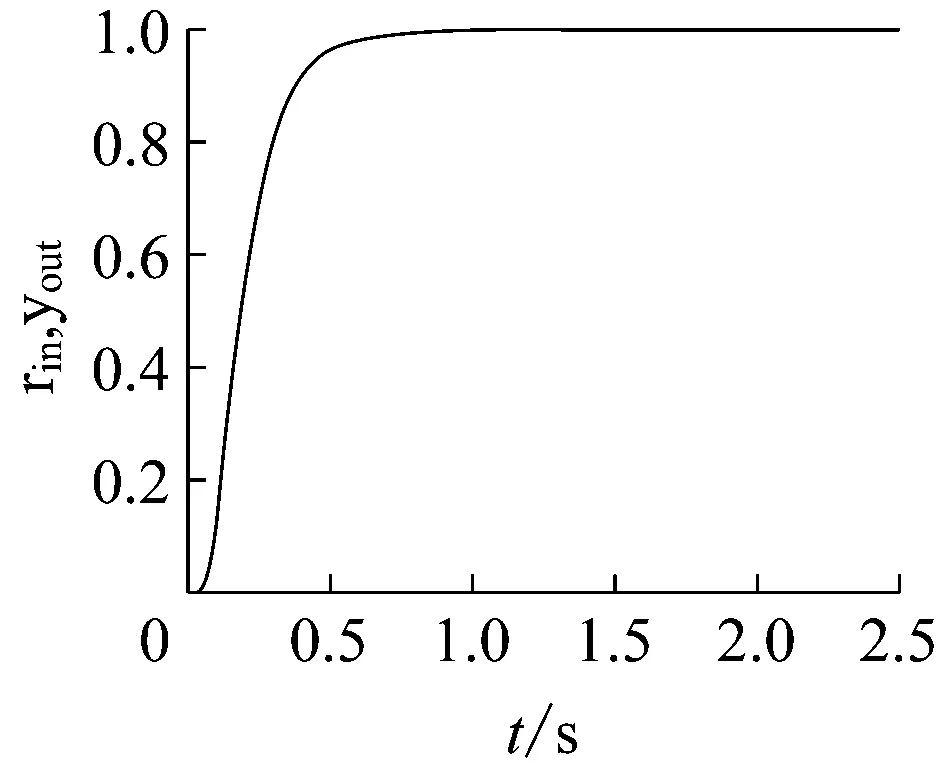
为验证遗传PID算法是否能够控制机械臂系统,先根据遗传算法输出的PID控制参数进行仿真实验,选取了两组PID参数,结果如下:
第一组参数选择:Kp=4.92,Ki=4.54,Kd=0.63,结果如图10(a)所示;
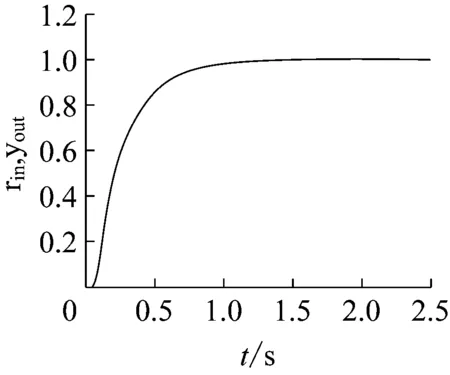
第二组参数选择:Kp=5.32,Ki=4.68,Kd=0.70,结果如图10(b)所示。其中rin表示机械臂位移的参考输入值(设为1.0),yout表示实际输出值。
(a) 第一组
(b) 第二组
图10 两组参数的Matlab仿真图
仿真结果分析:运行算法后,经过100次迭代可以近似认为目标函数已收敛到最小,满足停止准则。算法每次运行后输出的控制参数不一定是最优解,绝大多数是最优解的近似解,本文随机抽取了运行后的2组控制参数进行实验,由仿真图可以看出,输出参数的控制效果满足系统要求,验证了遗传算法最后整定出的PID参数确实具有可行性。
2.3.2 机械臂实物控制实验
在机械臂实物控制实验中,遗传PID算法实验以及后面的控制实验中,机械臂的目标角度位置均设为360°,实验电压均为12 V。因为经过仿真实验证实遗传PID控制参数能够控制实验系统,故选取如下两组PID参数进行机械臂的实物控制实验。
实验结果如下:
PID参数取值:Kp=4.92,Ki=4.54,Kd=0.63,结果如图11(a)所示;
PID参数取值:Kp=5.32,Ki=4.68,Kd=0.70,结果如图11(b)所示。
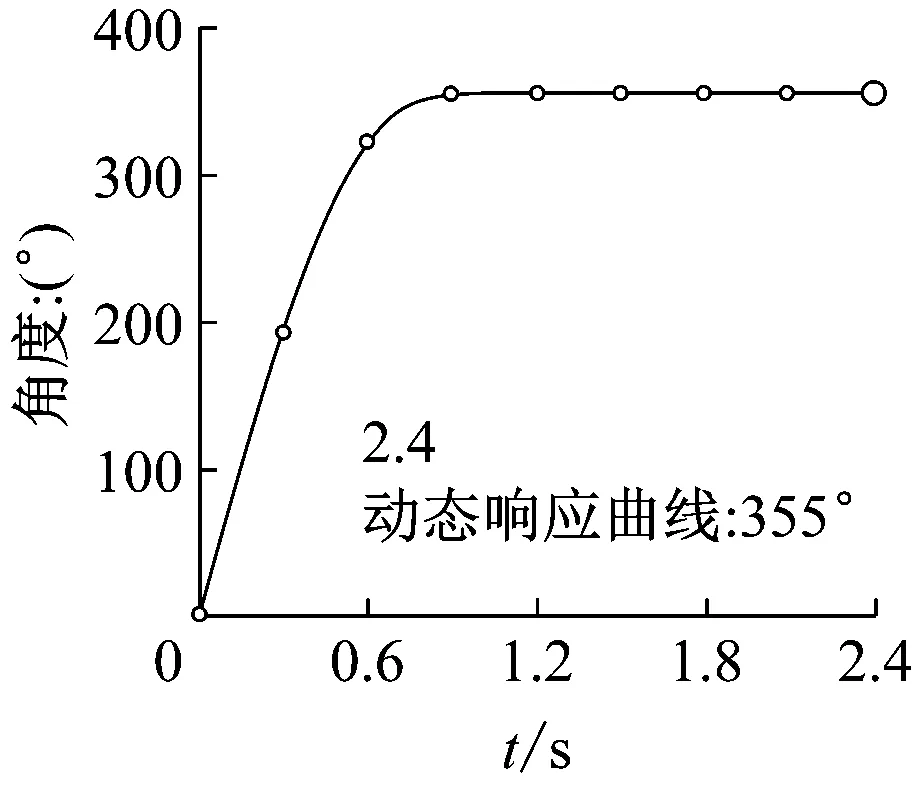
(a) 第一组
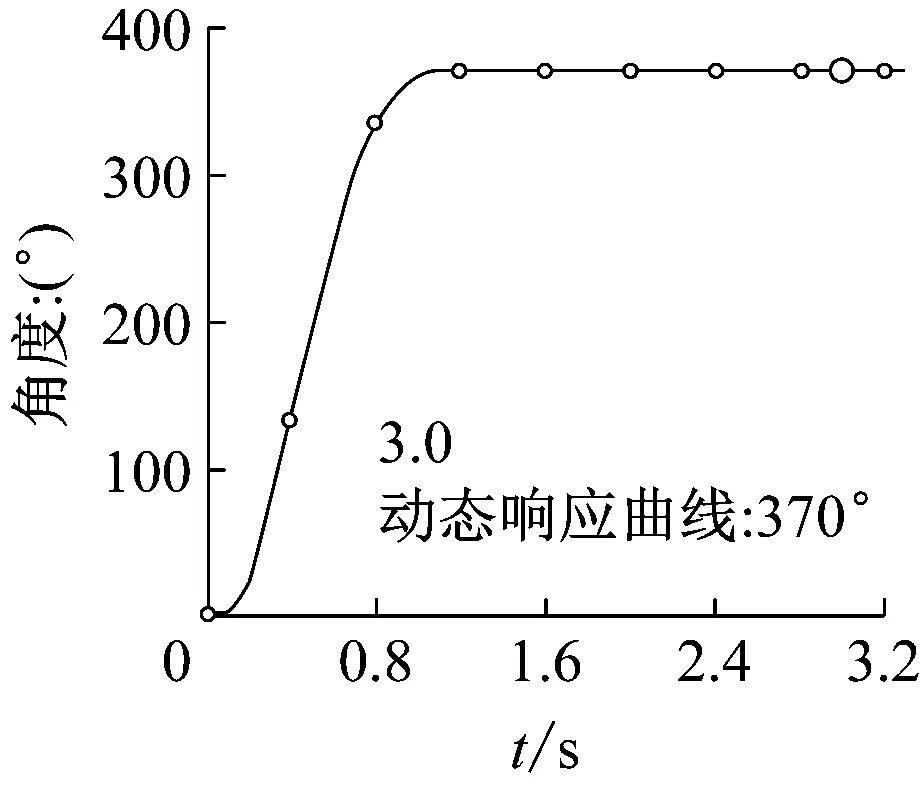
(b) 第二组
图11 两组参数的机械臂控制实验图
实验结果分析:机械臂实物控制实验中,机械臂的实验控制参数与Matlab仿真获得的控制参数能够做到一一对应。由图11可以看出,系统无超调,调节时间为1 s,设定位置360°,稳态误差绝对值分别为5°和10°,满足了机械臂系统的控制指标要求,但稳态误差不同,可令学生反复试验进行参数整定。
3 实验效果调查与分析
为了检验移动实验室中的移动远程控制实验是否使实验操作更加便捷,是否能够提高实验设备利用率,以及是否能够提高学生的学习效率,邀请了自动化学院20名大四学生、10名研一学生和10名研二学生使用M-Lab进行MRC-Experiment实验。设计了一套调查问卷,实验结束后由学生填写调查问卷。
调查问卷从M-Lab系统功能、M-Lab系统特色、学习效果两大角度设计共9个问题,为了能够更精细地了解学生对各问题的满意程度,此次调查问卷的评价方式采用打分制,即学生可以对每个问题进行打分,总分10分,8分及以上为非常满意,6分或7分为满意,5分为一般,3分或4分为不满意,2分及以下为非常不满意。调查问卷的反馈结果见表2~4。

表2 M-Lab系统功能反馈归纳表
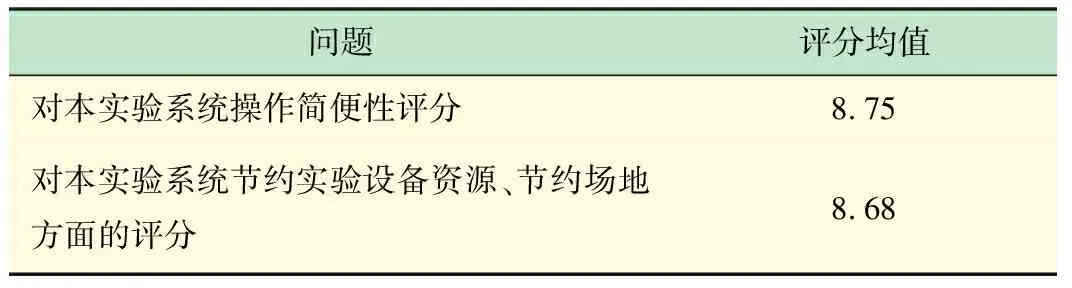
表3 M-Lab系统特色反馈归纳表
在设计的调查问卷的后半部分,邀请每个学生提出3个有待继续解决的问题。针对学生提出的问题,最有代表性的问题归纳为3类,①实验项目较少,②被

表4 学习效果反馈归纳表
控对象种类较少,③控制效果实时性难以保证(移动互联网的网络延时导致)。因此扩展底层设备与实验项目,给予更清晰的实验教学指导,是M-Lab今后的发展方向。
在调查问卷中最后一个问题是“如果您可以选择M-Lab中的MRC-Experiment或传统实验方式来进行实验,您会选择哪一种?”,调查结果是100%的受访者愿意选择MRC-Experiment进行实验。
4 结 语
本文针对控制类实验课程的在线教学,研究并设计了一套基于MOOC教学的自动控制理论实验课程。在提出了M-Lab与MRC-Experiment的基本原理与设计方法基础上,依托单自由度机械臂系统为被控对象,建立了一套移动端远程控制实验教学系统,实现了MOOC的在线实验教学。本实验教学系统可以完成校园网环境下的M-Lab的设计与实现,并允许学生进行MRC-Experiment。本实验教学系统还存在一些问题(网络延时、网络安全、多用户并发),这正是下一步要解决的研究课题。
猜你喜欢
军事文摘(2022年20期)2023-01-10
英语文摘(2021年11期)2021-12-31
甘肃教育(2020年4期)2020-09-11
物理之友(2020年12期)2020-07-16
甘肃教育(2020年8期)2020-06-11
电子制作(2019年24期)2019-02-23
学生天地(2018年19期)2018-09-07
中央民族大学学报(自然科学版)(2017年1期)2017-06-11
中国教育技术装备(2016年11期)2016-12-01
智能系统学报(2015年4期)2015-12-27
