
单相逆变器输出电压波形校正的实验研究
2019-11-26 07:29张敬南刘洪胜
实验室研究与探索 2019年10期
游 江, 孙 蓉, 张敬南, 刘洪胜
(哈尔滨工程大学 自动化学院, 哈尔滨 150001)
0 引 言
逆变器广泛地应用于工业生产和我们的日常生活中,为各类用电设备提供符合要求的交流电源[1-4]。在实际的应用中,很多因素会导致输出电压的波形产生畸变,比如为避免同一桥臂上下管直通必须设置的死区时间,具有非线性特性的负载等。由于非线性负载造成的高次谐波会对用电设备和逆变器自身造成不同程度的负面影响,针对单相或三相逆变器,如何保证在非线性负载条件下获得高质量的输出电压波形是被广泛研究和关注的一个问题[5-9]。
通过对相关研究的结果进行分析和总结可知,逆变器在非线性整流器负载条件下,或者在其负载快速变化情况下获得高质量输出电压波形的关键主要取决于控制系统在两个方面的设计因素和性能:其一是在频域中获得尽可能低的输出阻抗幅频特性,特别是在谐波频率点处应具有尽可能低的输出阻抗值,因为根据Thevenin等效电路理论[10]可知,将逆变器在某稳态工作点附近进行小信号线性化处理后,其较小的输出阻抗有助于减小负载侧谐波电流在内阻抗上的谐波压降,从而抑制逆变器输出端电压的畸变;另一方面,提高控制系统对负载电流快速脉动变化的动态响应能力。特别是通过观察畸变的逆变器输出电压波形,其对应在脉冲电流向上或向下阶跃突变的时刻,电压输出波形开始出现明显的向横轴方向的幅值跌落。本文在同步旋转坐标系下对比研究了单相逆变器基于PI控制器、PI+RC和PI+RC+LCF的3种控制方法的性能,层层递进使学生在实验研究过程中透过现象看本质,体会和认识到输出阻抗幅频特性和控制系统动态响应性能对逆变器输出电压波形的重要影响。通过理论分析、仿真和实验研究,使学生在深入了解和掌握相关的单相逆变器及其控制策略的同时,也让他们体会到科学研究的基本理念和方法,使实践能力和科研素养得到提高。
1 输出电压的控制策略
单相逆变器带整流器非线性负载的主电路和控制结构图如图1所示。整个控制系统由同步旋转坐标系下的PI调节器和比例环节电流控制器K构成基本的逆变器电压电流双闭环控制系统。重复控制器Grc用于周期性电压谐波抑制,其输出叠加在双闭环控制系统电流内环的指令信号上。负载电流前馈补偿器Gff用于快速补偿非线性负载的影响。单相逆变器的数学模型的建立过程已在《电力电子系统建模与控制》课程中学习过,在此就不再赘述了。
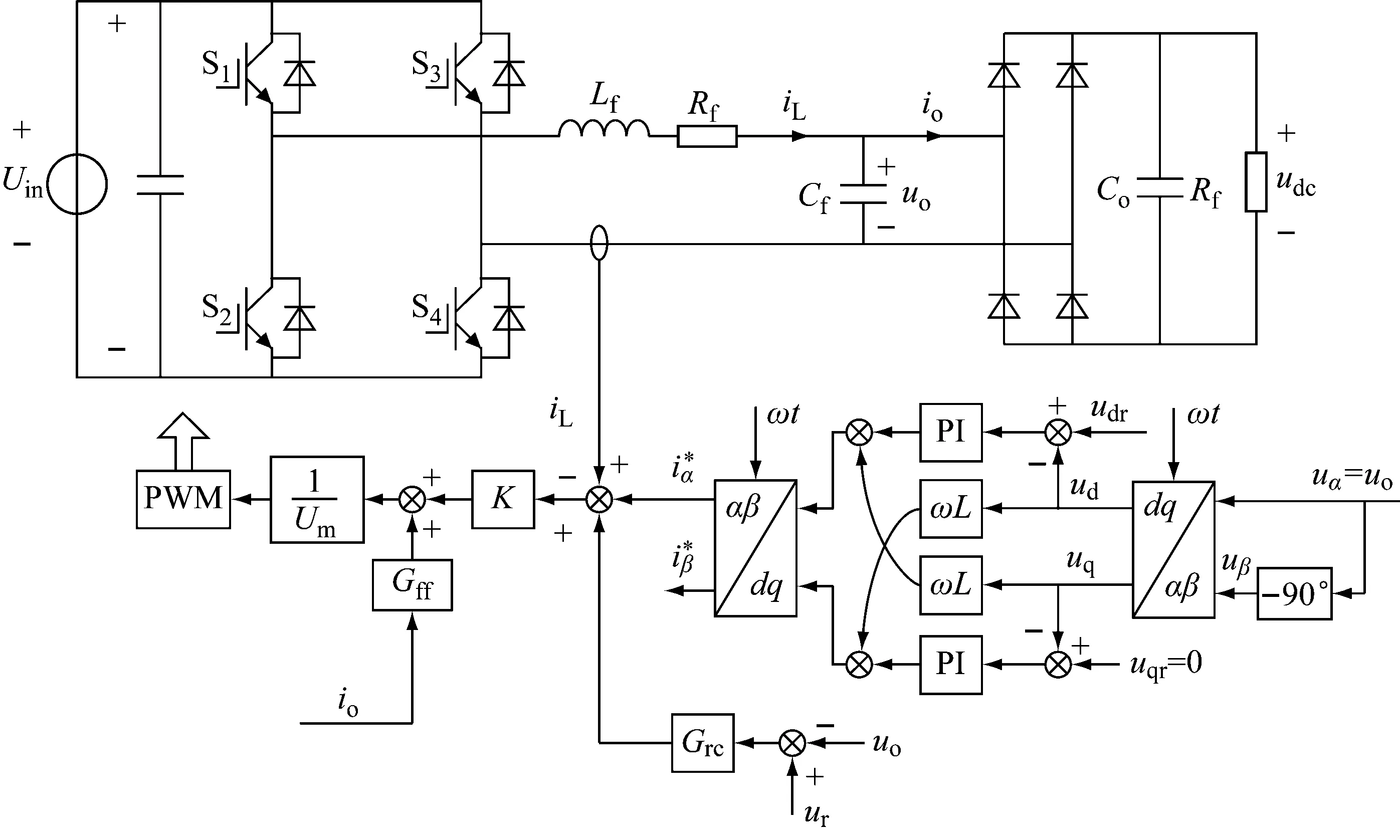
图1 单相逆变器的主电路与控制结构
1.1 基本的电压/电流双闭环控制结构
电流环可以改善系统的动态响应性能并达到限流的目的。而在实际应用时,过宽的电流环带宽可能采样噪声等干扰引入控制系统,而较低的电流环穿越频率的也会影响其外部到电压环的带宽。折中考虑,可将电流环的穿越频率设置为开关频率的1/5~1/10。
在同步旋转坐标系下采用PI控制器作为电压环控制器[11],即SRFPI,图2为通过左边变换实现SRFPI的结构框图。由于理论上PI控制器只能实现对直流信号的无静差控制,因此如图2所示需要将两相静止坐标系下正交的α、β交流分量经同步旋转变化后转换为直流量进行控制。若将逆变器的输出电压视为uα,则可采用下式所示的90°移相滤波器获得与之正交信号uβ
(1)
式中,ω0为电压基波角频率。本文逆变器输出电压的
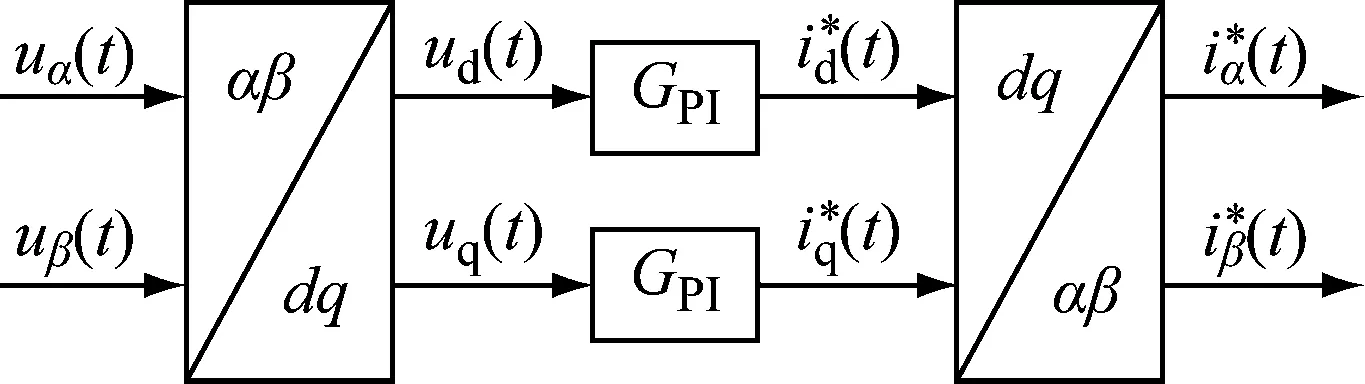
图2 SRFPI控制结构框图
频率为50 Hz,则ω0=100 πrad/s。
如图1所示,将逆变器的输出电压通过坐标变换从静止坐标系变换到同步旋转坐标系,分别在dq轴进行PI控制,再通过坐标反变换变换到静止坐标系下,将iα*(t)作为电流内环的给定值。
(2)
式(2)中的“⊗”符号为卷积运算。由图1可见,由于电压环工作在同步旋转坐标系下,而电流环仍然工作在αβ坐标系下。因而在考察系统控制性能和稳定性时可将电压和电流控制环统一变换到静止坐标系下。令同步旋转坐标系下的PI控制器为
(3)
则在静止的αβ坐标系下可等效为一个形如下式所示的谐振频率为ω0的三阶谐振控制器[12]:
(4)
式中:
(5)
上式说明了同步旋转坐标变换下的PI控制器与静止坐标系下谐振控制器的等效性,因为谐振控制器在ω0处具有很高的增益,因而能够实现对ω0分量的无静差控制(而PI控制器在零频率处具有无穷大增益,因而可获得对直流信号的无静差控制)。
1.2 重复控制
从频域角度分析,逆变器带非线性负载时,输出电压畸变的主要原因是由于非线性负载产生的谐波电流在逆变器的输出阻抗上产生谐波压降。所以最大限度的降低逆变器在各次谐波频率点处的输出阻抗,是缓解非线性负载引起逆变器输出电压畸变的一种直接和有效的方法。从时域角度分析,重复控制器实质上是不断地对N个节拍(一个基波周期)之前的波形偏差数据进行累计(积分)[13],其作用实质上是与PI控制器类似的(PI控制器每隔一个采样周期对误差进行一次累计)。因而只要采样频率和采样精度足够就可以实现对周期性信号的跟踪。而从频率域上看,重复控制器成功构造出了任意波形的周期信号的内模,可以减小各谐波频率处的输出阻抗。这是重复控制器之所以能够被用于跟踪周期信号并消除周期性谐波畸变的根本原因[14]。重复控制的基本原理在相关文献中有详细的介绍,本文不再赘述。其结构图如图3所示。
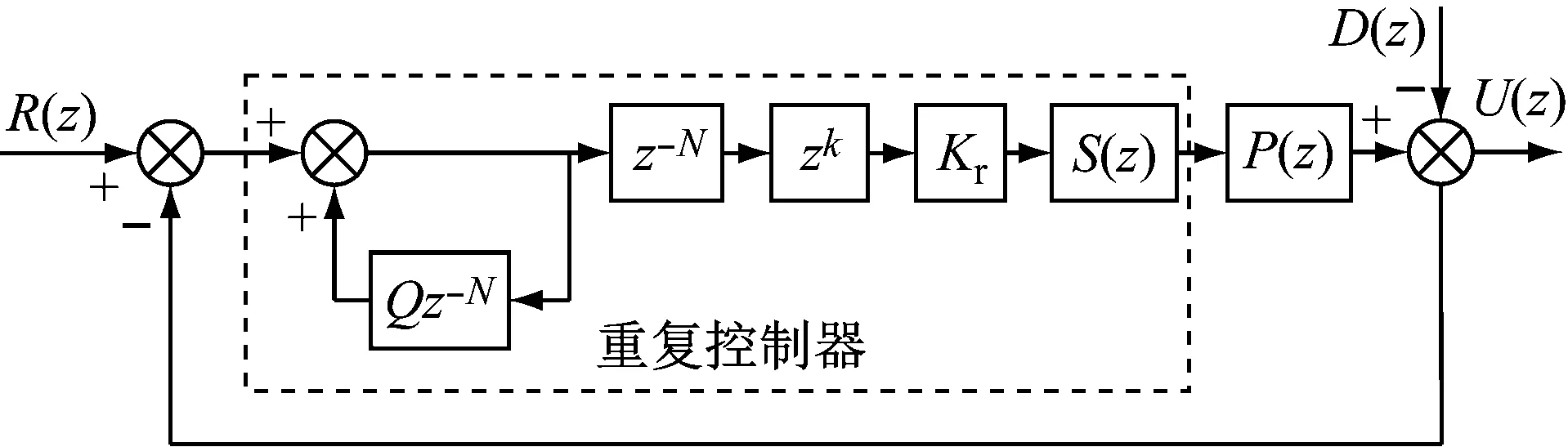
图3 重复控制器结构图
(1)z-N:前向通道上串联的z-N使当前检测到的误差信号要到下一个基波周期才作为控制量的一部分对系统产生调节作用。若系统采样频率为10 kHz,输出电压频率为50 Hz,因此N=200。
(2)Q:理想的重复控制系统中,Q=1,但内模的单位圆上的N个极点使系统处于临界稳定状态,为了增强系统稳定性,Q一般取略小于1 的正常数,此处取Q=0.95。
(3)Kr:重复控制增益,用于改变内模输出量的幅值,根据系统性能和稳定性要求进行设置。
(4)zk:超前环节zk用来补偿S(z)和P(z)所引入的相位滞后,使S(z)和P(z) 在中低频段接近零相移。
(5) 滤波器S(z)是根据P(z)的特性而设计的,主要目的是增加系统Bode图高频部分的斜率,提高系统的抗干扰能力。
1.3 负载电流前馈补偿
从时域角度直观的分析,负载电流前馈补偿可以快速的将负载变化反映到控制系统中,因而能够有效抑制负载突然增加所造成的电压跌落。文献[15]中提出了逆变器双闭环负载电流前馈的控制方式,但并未给出具体前馈控制器的设计方法,本文从减小输出阻抗的角度来进行前馈补偿器的设计。引入负载电流前馈补偿器Gff后的控制系统框图如图4所示。

图4 带有负载电流前馈系统结构图
图中:Gc=K;G1=1/(sLf+1),G2=1/sCf。Km=uin/Um,Um为调制器模型,Um为载波幅值。根据图4,可得仅在PI双闭环控制模式下,逆变器的输出阻抗表达式为

(6)
而在采用PI+RC和PI+RC+LCF的情况下,逆变器输出阻抗分别为:
(7)
(8)
根据前文的讨论,如果要抑制负载电流引起的电压畸变则应尽可能减小逆变器的输出阻抗,若令式(8)的分子项满足
1+KmG1Gc-KmG1GffGc=0
(9)
可得
(10)
为了使式(10)成为一个有理分式,可在式(10)中分母中引入(sTp+1)项,同时引入该项表达式有利于提高系统对高频噪声的免疫能力,Tp数值可根据实际系统调试的情况来确定。最终的Gff表达式可写为:
(11)
2 Matlab/Simulink仿真
在Matlab/Simulink环境下搭建了仿真模型来研究所提出的控制策略的有效性。仿真模型参数为:输入直流电压Uin=400 V,输出电压Uo=220 V,输出电压频率f=50 Hz,开关频率fs=10 kHz,输出滤波电感Lf=2 mH,输出滤波电容Cf=50 μF,整流器直流电容Co=500 μF,负载电阻RL=50 Ω,数字三角载波峰值Um=4 kV。
所设计的电压环PI控制器参数为Kp=0.2,Ki=60;比例电流控制器为K=250。经双环校正后的系统Bode图如图5所示。由图可见,双环系统在50 Hz处有一个尖锐的谐振峰,保证其对50 Hz信号的跟踪能力。穿越频率约为513 Hz,相位裕度约为71°。重复控制器参数N=200,Kr=0.16,Q=0.95, 时延补偿环节为z3,低通滤波器S如下式所示:
(12)
其自然谐振角频率为5 kHz。
图6为根据式(6)~(8) 所获得在不同控制方式下的单相逆变器输出阻抗的幅频特性。


图5 经校正后的双闭环控制系统Bode图
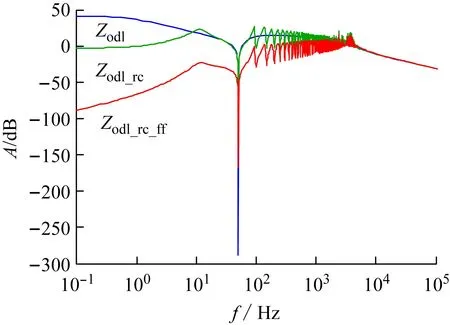
图6 不同控制方式下的单相逆变器输出阻抗
图中:Zodl为仅采用PIDLC控制条件下的逆变器输出阻抗;Zodl_rc为采用PIDLC+RC控制条件下的逆变器输出阻抗;Zodl_rc_ff为PIDLC+RC+LCF控制条件下的输出阻抗。可见3种控制方式下逆变器的输出阻抗具有明显的差异,其中PIDLC+RC+LCF方案可使输出阻抗在大范围内显著的降低。可以预测在同样的非线性负载条件下,此种情况对应的逆变器输出电压THD (Total Harmonic Distortion,总谐波畸变)最低。
图7所示为时域仿真的输出电压和电流波形图。图7(a)所示为仅采用基本的PIDLC情况下,单相逆变器的输出电压和输出电流波形,可见输出电压uo在负
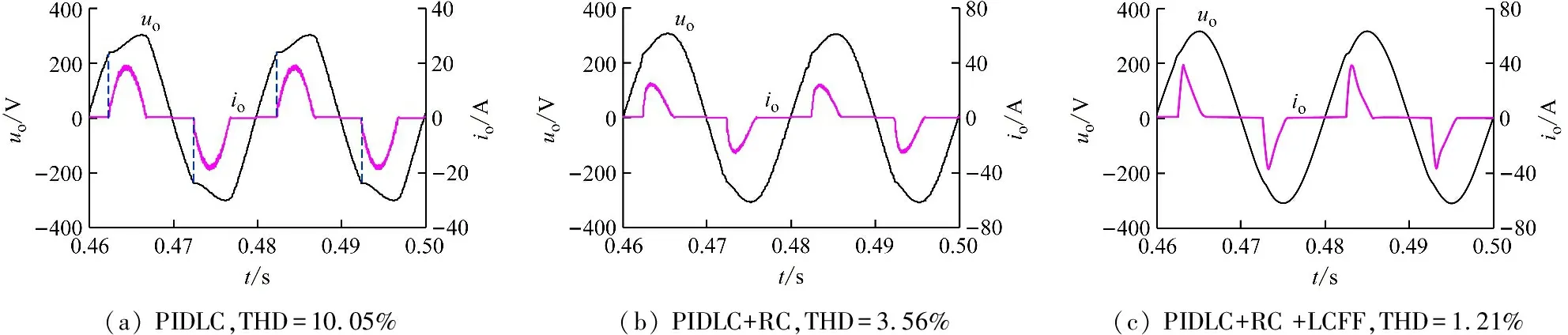
图7 不同控制方式下的逆变器输出电压/电流波形
载电流io的阶跃时刻开始出现明显的畸变(跌落),且周期性重复出现。图7(b)为PIDLC+RC的仿真波形。与图7(a)相比较,输出电压质量有比较明显的改善, 电压的THD由图4的10.05%下降为3.56%,这与图6中对应的输出阻抗减小相吻合。图7(c)为PIDLC+RC+LCF控制所对应的仿真结果。图中电压的THD降至为1.21%。在负载电流阶跃的初始阶段仅有少许输出电压下跌了。
3 实验结果及分析
实验所采用的参数与仿真模型基本一致。硬件控制板以ST公司的32 bit ARM Cortex-M4微处理器STM32F407IGT6为核心。其内核主频可达168 MHz,指令执行速度高达210 MIPS,并支持浮点数运算。具有先进和丰富的外设,如高速12 bit A/DC和D/AC,用于PWM控制的灵活高精度定时器等。它非常适合于实现本文所讨论的控制策略。逆变器主电路采用两个Infineon IGBT模块构成(FS200R12KT4R,200 A/1 200 V),采用集成驱动模块2SD106AI作为IGBT驱动器,单相二极管整流器由整流桥MDS150 A1 000 V和500 μF电解电容构成。
实验结果如图8所示。图8(a)给出仅采用PIDLC控制情况下的实验波形,可见输出电压具有明显的畸变。电感电流峰值约13 A,输出电压的THD含量约为8.45% 。图8(b)对应PIDLC +RC实验结果,相应的输出电压的THD降低到约为2.16%,逆变器输出电压的质量有较明显的改善。虽然负载条件下与图8(a)完全一致,但图8(b)中的电感电流峰值达约为20 A。图8(c)所示为采用PIDLC+RC+LCF控制条件下所得到的实验结果,负载条件与之前情况一致。与图6所示的输出阻抗频域分析相对应,在此控制模式下,由于单相逆变器输出阻抗的显著减低(谐波压降进一步降低),图8(c) 中逆变器输出电压波形的THD含量下降到了1.91%,而此时的电感电流峰值则上升到了约25 A。
图8(a)~(c)中逆变器输出电压的THD逐渐下降,而相应的电感电流峰值却逐渐增加,这说明控制系统是通过提供更多的暂态能量以补偿负载电流阶跃突变时的输出电压下跌的。也可以说是以电感电流暂态值的增加为代价换取输出电压谐波畸变减小的。
4 结 语
本实验课程在同步旋转坐标系下,对比研究了PIDLC控制策略,PIDLC+RC控制策略以及PIDLC+RC+LCF控制策略在非线性负载条件下抑制逆变器输出电压畸变的性能。仿真和实验表明通过控制系统设计减小逆变器的输出阻抗,提高控制系统动态响应能力是降低逆变器输出电压的THD有效方式,是提高逆变器输出电压质量的根本所在。将该实验应用于研究生电力电子系统建模与控制相关课程的实验教学,能够达到以下教学目的:巩固理论课所学建模与控制系统设计相关的知识;加深学生对实际电力电子变换器功率电路和控制电路构成的认识,实践数字控制系统的实现过程,训练硬件调试和软件编程能力;通过教师引导,使学生学习和体会到分析-设计-仿真-实验验证这样一个基本的科研工作思路和流程以及通过对比研究来分析和发现一般性规律的方法。
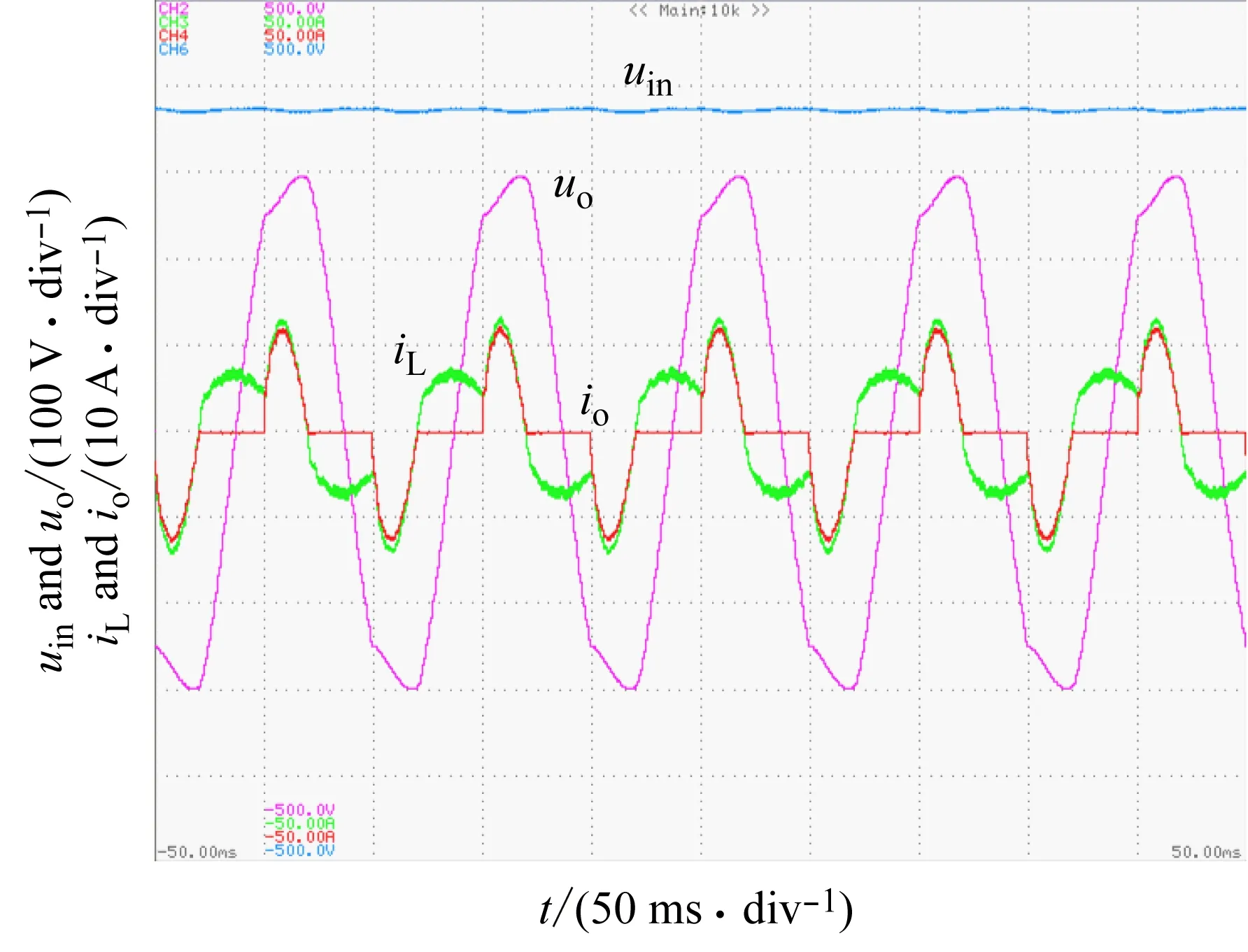
(a) PIDLC
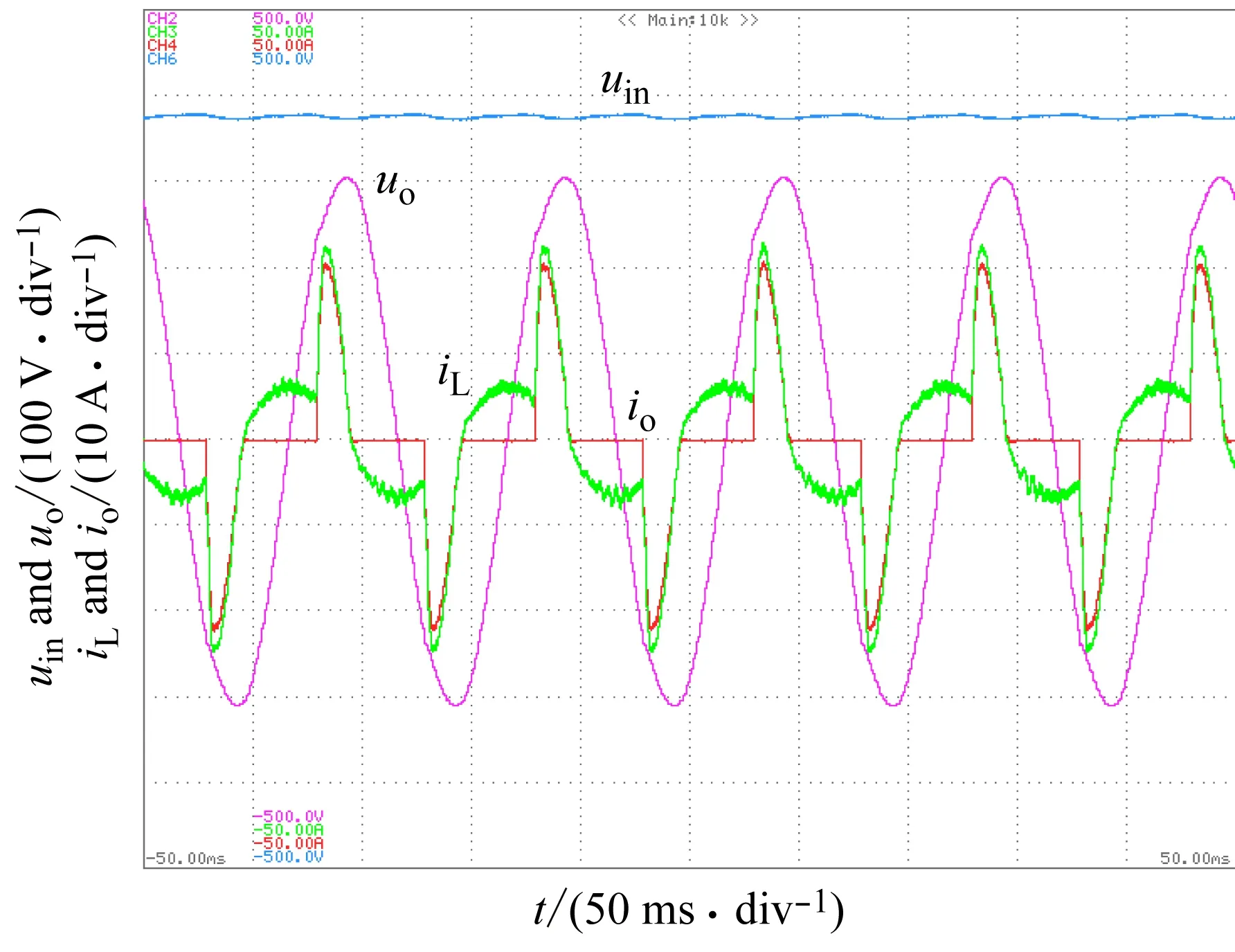
(b) PIDLC+RC
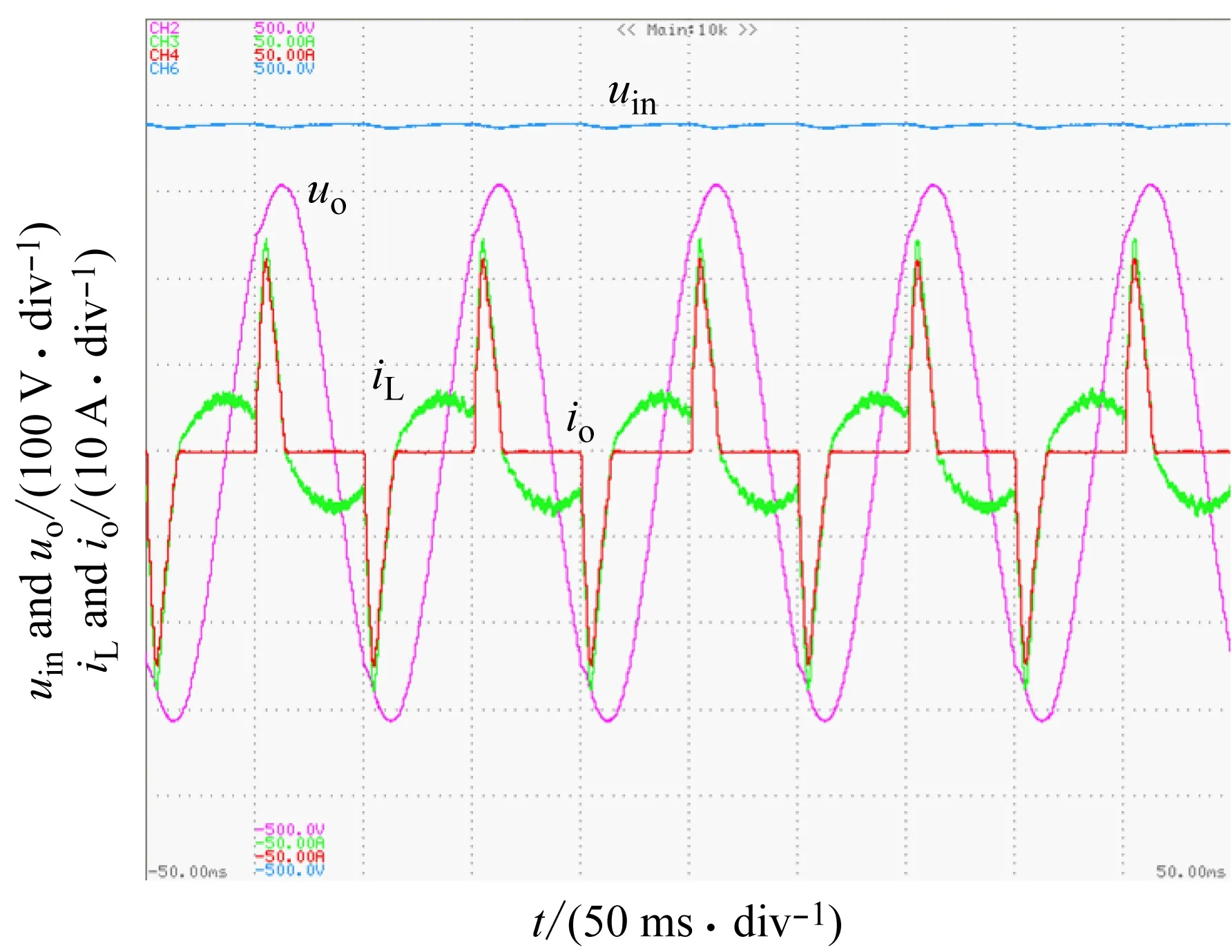
(c) PIDLC+RC+LCF
猜你喜欢
东南大学学报(自然科学版)(2020年1期)2020-01-16
电子制作(2018年18期)2018-11-14
电子制作(2018年17期)2018-09-28
通信电源技术(2018年5期)2018-08-23
电子制作(2018年9期)2018-08-04
摄影之友(影像视觉)(2017年10期)2017-11-07
通信电源技术(2016年1期)2016-04-16
通信电源技术(2016年4期)2016-04-04
通信电源技术(2016年5期)2016-03-22
中国铁道科学(2015年4期)2015-06-21
