
PLC翻转课堂教学实验系统设计与实现
2019-11-26 07:29:22王攀攀童志刚徐瑞东邓先明
实验室研究与探索 2019年10期
王攀攀, 童志刚, 徐瑞东, 邓先明
(中国矿业大学 电气与动力工程学院, 江苏 徐州 221116)
0 引 言
翻转课堂自2011年开始逐渐在美国流行,并传播到世界各地[1]。它倡导将知识的讲解置于课前,利用教学微视频实现;师生在课堂上通过教学活动和互动交流,实现知识的内化[2-3]。翻转课堂颠覆了传统教学的讲授模式,将课堂的宝贵时间用于知识的高级认知和实践应用[4-5]。通过近几年的发展,国内许多课程都开展了翻转课堂教学模式的研究,并取得了较好的效果,也证实了翻转课堂教学模式的可行性和优越性[6-11]。
到目前为止,翻转课堂模式大多针对受众面较广的基础课,对实践性更强的专业课涉及较少。为此,在江苏省品牌专业建设项目和学校教育教学改革项目的支持下,我校开展了可编程控制器(PLC)类课程的翻转课堂教学改革。由于翻转课堂模式要求课堂教学将更多的时间用于知识的高阶认知,使得PLC类课程教学改革面临的第一个问题就是如何提高课堂知识的认知层次。解决该问题的有效途径是将理论与实践教学同时在课堂中开展,实现理论知识在应用、分析、评价和创造等方面的高级认知。但是传统PLC实验台因体积庞大、被控对象单一、无法一对多地连接到每位学生等原因,难以应用于PLC类课程的翻转课堂教学模式。
鉴于此,梳理出翻转课堂教学模式对PLC课堂实验系统的要求;然后利用计算机、虚拟仿真、无线通信等技术,设计出适用于PLC翻转课堂教学的课堂实验系统。
1 实验系统整体设计
在PLC翻转课堂教学模式中,学生是整个教学过程的主体,是课堂教学的“主角”[12-14];他们在课前完成知识的记忆与初步理解,在课内开展知识的应用、分析、评价等高级认知内容。作为教师为了实现这种翻转,需要根据各个知识点的教学目标,设计更多的实际问题和实验,引导学生在课堂上分析问题、提出方案、验证方案和评价方案,最终达到在知识、能力和情感方面的教学目标[15-16]。在整个课堂教学的过程中,需要一种能够开展“以学生为中心”的教学实验系统,以满足方案的验证、分析和评价等活动的需求。
由于课堂教学和翻转课堂教学模式相对于传统的实验室教学有所不同,因此在普通多媒体教室中开展实践教学,对PLC实验系统提出了新的要求:
(1) 整个实验系统体积小、重量轻,方便带入课堂。
(2) 实验被控对象多样化,可根据知识点要求,任意构建。
(3) 实验系统具有较好的可视性,每位学生都能够清晰地观察到实验的过程和效果(特别是大班授课)。
(4) 实验系统具有较好的用户接入性,可方便地连接到每一位学生的电脑,便于其参与到实验的各个环节。
(5) 实验系统既可开展软件编程实验,又可开展硬件接线实验,便于硬软件知识的授课。
依据上述要求,整个实验系统的主体设计思路是:① 利用计算机和虚拟仿真技术将被控对象虚拟化、可编程化;② 利用无线通信技术尽可能减少线路连接,便于课堂实验的开展。基于该主导思想,新的PLC课堂实验系统如图1所示。该实验系统由虚拟被控对象、实体PLC以及学生电脑3部分构成。
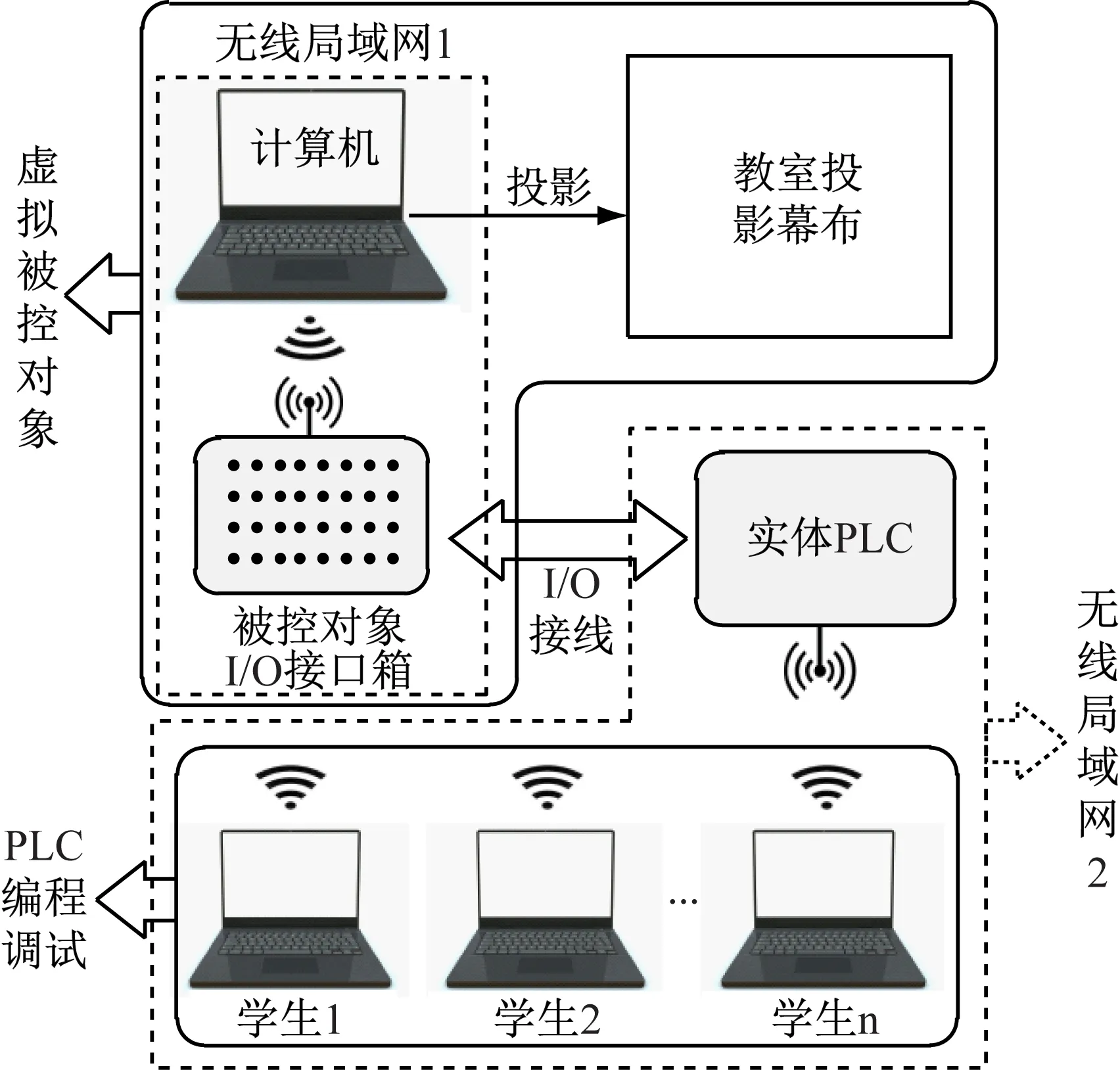
图1 实验系统结构
在设计过程中,为了满足教学要求,实际的被控设备被设计成可编程的虚拟被控对象,并利用教室中的投影系统展示到大屏幕,使得教室中的每个学生都能够观察到实验过程。为了使PLC能够控制该虚拟被控对象,需要建立“虚”与“实”之间的媒介——被控对象I/O接口箱。该接口箱与PLC之间采用硬接线的方式连接,用于开展硬件实验教学;与虚拟被控对象间的连接,则采用无线通信的方式,这样既可消除复杂的接线问题,也可提高实验系统的实用性。对于图中的PLC部分,同样配备了无线通信模块用于形成课堂中所有学生的局域网,使得每个学生都能参与到实验的各个环节。此种无线局域网的连接方式,消除了学生在教室中的位置差异,同时也极大地降低了学生接入实验系统的难度。
2 实验系统硬件设计
根据系统的整体设计,实验平台的硬件主要包括:投影系统、虚拟被控对象、实体PLC和编程/调试计算机。其中投影系统可采用教室自带的多媒体系统;编程和调试计算机可让学生自带个人笔记本电脑;而实体PLC部分则主要由PLC和无线路由模块组成。PLC的品牌、I/O模块和特殊功能模块的类型和数量,可根据所教课程的内容和需求而定。
虚拟被控对象硬件较为复杂。首先它需要一台计算机和相关软件建立一个能够高度还原真实设备的内部软模型。并且该模型可以通过改变其中的变量值进行任意控制。这种方式很好地解决了实际被控设备的虚拟化问题,但是虚拟模型却无法直接连接到实际的电路中。因此,为了让PLC能够控制该虚拟被控对象,则需要将模型中的控制变量“映射”到实际的输入输出电路上。对于普通的笔记本电脑,并不具备工业上通用的信号输入输出通道,但它们具有各种通信接口,比如以太网、USB等。故可利用计算机的这一特点,选型一些具有通信功能的远程I/O模块,从而解决计算机缺乏信号接口的问题,具体方案如图2所示。
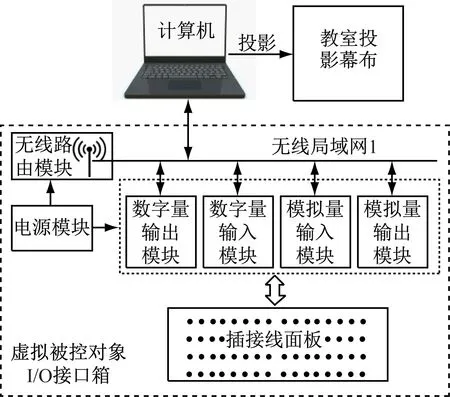
图2 虚拟被控对象硬件结构
在图2中,计算机实现了实际被控对象的建模、仿真和显示,并将所有显示内容投影到大屏幕中,方便在教室中开展实验;虚拟被控对象I/O接口箱则将模型中的变量对应到实际的I/O电路上,便于实体PLC进行控制。在I/O接口箱中,数字量I/O模块和模拟量I/O模块是整个“虚实”映射的中心。一方面它们通过无线以太网将模型中的变量与自身的I/O通道相对应;另一方面通过硬接线将这些通道连接到插接线面板上,方便外部接线。
3 实验系统软件设计
3.1 软件构架
由于所设计的实验系统是面向课堂教学的,因此软件的设计必须配合每堂课的教学方案。在教学方案中,整门课程通常可拆分为若干个教学单元,而每个单元又可拆分为若干个知识点。在课堂教学中,通常是针对具体的知识点开展教学活动的,因此实验系统的软件设计可按照知识点的划分进行设计。并且每个知识点可根据其教学目标、重要程度、课时安排等因素设计一个或多个实验。图3所示是我校开展PLC翻转课堂时所构建的实验系统软件结构。
3.2 单个实验的软件设计
每个实验的软件主要包括计算机内的虚拟被控对

图3 实验系统软件结构
象程序和PLC程序。虚拟被控对象的程序设计采用组态软件实现;PLC程序则利用PLC编程软件编写,并且这部分内容是由学生在课堂上根据控制要求自行设计完成,属于实验内容。因此本节主要介绍虚拟被控对象的软件设计。从图3可见,不同的实验对应不同的虚拟被控对象,从而满足不同知识点的教学需求。尽管这些虚拟被控对象存在较大差异,但是它们的设计流程是类似的。图4所示为总结出的虚拟被控对象设计流程。

图4 虚拟被控对象设计流程
(1) 选择合适的被控对象,并熟悉其工艺流程。依据知识点的特点和教案的设计,选择实际生产中合适的控制对象;同时熟悉该设备的工艺流程,为后续虚拟被控对象的设计提供基础信息。
(2) 制作被控对象的外观模型。根据实际被控对象的外形,做适当简化,制作出外观模型;除了被控对象的主体外观,还需增加相应的虚拟传感器。
(3) 确定运动部件并建立与其关联的动画控制变量。为使虚拟被控对象达到实际设备的动态控制效果,需要确定和分类外观模型中的运动部件;依据运动部件的动作特点建立与其关联的控制变量,用以控制运动部件的动画效果。
(4) 建立I/O控制变量与内部动画变量间的数学模型,并用程序实现。为了便于动画制作,连续运动(变化)部件的动画通常与内部变量相关联,因此外部信号无法对其进行控制。为了让PLC能够控制出与实际设备一样的动画效果,必须根据实际设备的动作特点,建立起I/O变量(外部变量)与动画控制变量间的数学关系,并利用脚本程序进行实现。
(5) 制作虚拟主令电器。无论是实际控制对象还是虚拟控制对象都需要人机操作功能,因此在每个实验中或多或少地都要增加主令电器,并且还要与外部I/O变量进行关联,才能够将虚拟信号传递给实体PLC。
(6) 绘制虚拟被控对象I/O接线图。在每个实验的界面上还需要制作虚拟被控对象I/O接线图,也就是将实验界面上的虚拟主令电器、虚拟传感器和虚拟被控对象所关联的输入输出通道在I/O接口箱上进行标记,以便学生在做实验时知道如何接线。
4 实验系统实现
4.1 硬件实现
(1) 虚拟被控对象。主要包括笔记本电脑和自制I/O接口箱(投影系统为教室自带系统),如图5所示。

图5 虚拟被控对象照片
I/O接口箱内选用了4块支持Modbus-TCP/IP通信协议的I/O模块,其中8输入8输出的数字量模块2块,8路模拟量输入模块1块,4路模拟量输出模块1块,并将这些I/O通道全部接于插接线面板,方便与PLC进行线路连接。同时接口箱还配备了无线路由模块,用于I/O模块与计算机间的数据交换。此种方式不但省去了大量的连接线,同时也消除了接口箱与计算机间的空间位置问题。
(2) 实体PLC部分。选用了1台S7-1200PLC和1块工业用无线路由模块,具体如图6所示。并且所有的PLC I/O端子全部转接成插接端子,方便后续实验接线。
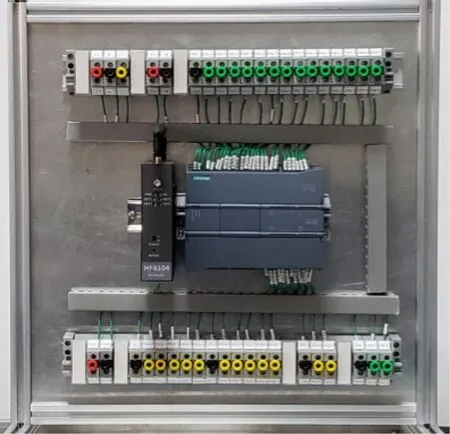
图6 实体PLC照片
4.2 单个实验的软件实现
以顺序功能图知识点中的第1个实验为例,利用组态软件实现单个实验的程序设计。在程序设计之前,需要根据顺序功能图的知识特点、教学目标、课时安排等因素选择一个实际的生产设备,并详细了解它的工艺流程。在这里选择了工业生产中的搬运机械手作为实际被控对象。它的工作流程是将工件从A点搬运到B点,并不断的重复。下面按照虚拟被控对象的程序设计流程,将其虚拟化。
(1) 制作机械手的外观模型。根据实际机械手的外形,适当简化后利用组态软件绘制出外观模型,具体如图7所示;在绘制外观模型时,还需添加必要的限位传感器。

1-工件,2-机械手,3-升降杆,4-升降缸,5-水平移动杆,6-限位传感器
图7 机械手外观模型
(2) 确定运动部件并建立与其关联的动画控制变量。图7所示中1~6号部件都需要制作动画,并且各个部件的动画形式各不相同,比如:1和3号部件需要上下左右都能移动;4和5号部件只需左右移动即可;6号限位传感器需要显示到位或不到位的状态动画;2号部件既要实现上下左右的移动,同时还需要实现夹紧和松开的动作。根据这些部件的移动特点,将它们分为3类:一类是连续移动的动画,如1、3、4、5;一类是显示不同状态的动画,比如6号部件的到位与不到位这两种状态;最后一类是前两类的结合体,如2号部件。依据组态软件的动画制作原理,连续移动部件需要关联一个整型变量,只要改变该变量数值即可实现部件的连续运动;对于状态型动画,可采用软件中的显示和隐藏功能来满足要求,该功能的控制可关联离散变量进行实现;对于2号这种多动画部件,可同时采用两种变量对其进行控制,以达到动画要求。
图8所示为组态软件中与各个运动部件相关联的部分动画控制变量。其中直接关联外部变量的部件可以直接通过I/O接口箱对其进行控制或状态反馈。
(3) 建立I/O控制变量与内部动画变量间的数学模型,并用程序实现。在上一步中,1~5号部件都是连续运动部件,且关联的都是内部整型变量。但是对于实际的机械手,这些运动都需要通过以压缩空气为动力源的气缸实现;并且每个气缸都配备了相应的电磁阀用于PLC对气路的控制,从而完成规定的动作。下面以升降运动为例简要说明机械手的控制原理。用于升降的气缸通常配以中封式三位五通电磁阀。这种电磁阀具有两个电控线圈。当两个线圈都不得电时,

(a) 部分连续移动控制变量

(b) 部分状态动画控制变量
图8 动画控制变量
气缸停止运动,机械手静止;当对控制气缸活塞伸出(下降)的电磁阀线圈通电时,机械手做下降运动;当对控制气缸活塞缩进(上升)的电磁阀线圈通电时,机械手做上升运动。从上述控制原理可以看出,运动部件的控制变量是开关量,且都是外部变量。因此,必须建立I/O控制变量与内部变量间的数学模型,保证控制信号与动画的一致性。下面以部件1(工件)为例,介绍如何建立内外部变量间的数学模型。假设工件上下移动的内部变量为y,左右移动的变量为x,则其I/O控制变量与动画变量间的数学关系为:
(1)
式中:u为上升电磁阀线圈状态,d为下降电磁阀线圈状态,c为夹紧电磁阀线圈状态,r为右行电磁阀线圈状态,l为左行电磁阀线圈状态,且这些线圈的状态都与离散I/O变量相关联;Δy为上下移动的步长,可根据实际移动速度和屏幕分辨率确定;ymin和ymax是上下移动的边界,可根据上下移动的范围和屏幕分辨率确定;Δx、xmin和xmax是左右移动相对应的常量。运动部件内外部变量的数学关系虽已确定,但要使他们在组态软件中真正建立起确定的数值关系,还需利用软件中的脚本程序进行实现。脚本程序类似于C语言,如果对式(1)进行编程,则其代码程序为:
if(上升电磁阀线圈==1 &&下降电磁阀线圈==0 &&夹紧电磁阀线圈==1)
工件垂直位置=工件垂直位置+Δy;
if(工件垂直位置>ymax)
工件垂直位置=ymax;
if(上升电磁阀线圈==0 &&下降电磁阀线圈==1 &&夹紧电磁阀线圈==1)
工件垂直位置=工件垂直位置-Δy;
if(工件垂直位置 工件垂直位置=ymin; if(右行电磁阀线圈==1 &&左行电磁阀线圈==0 &&夹紧电磁阀线圈==1) 工件水平位置=工件水平位置+Δx; if(工件水平位置>xmax) 工件水平位置=xmax; if(右行电磁阀线圈==0 &&左行电磁阀线圈==1 &&夹紧电磁阀线圈==1) 工件水平位置=工件水平位置-Δx; if(工件水平位置 工件水平位置=xmin; (4) 制作虚拟主令电器。如果搬运机械手要开展手动控制实验,则需要增加上升、下降、左行、右行、夹紧、松开6个虚拟按钮,这些按钮与外部I/O变量相关联,可以将主令信号通过接口箱传送给PLC。 (5) 绘制虚拟被控对象I/O接线图。将搬运机械手程序中所有外部I/O变量所对应的输入输出通道在接口箱的接线端子图中进行标记,方便与PLC接线。其中包括6个控制按钮,4个限位传感器的状态反馈和5个控制机械手运动的电磁阀线圈。 基于上述步骤,最终的搬运机械手的实验界面如9所示。 图9 搬运机械手实验界面 在4.1和4.2节的基础上,将整个实验系统用于课堂教学,实现效果如图10所示。从图中可见,整个实验系统小巧、轻便,方便携带;除了PLC与接口箱之间需要硬接线(用于硬件教学),其他连接全部采用无 线通信方式实现,便于翻转课堂的开展。该实验系统的实现,解决了翻转课堂中难以开展实践教学的问题,同时也极大地提高了学生的学习兴趣,为良好的教学效果奠定了基础。 针对PLC翻转课堂的教学需求,设计并实现了适合该教学模式的课堂教学实验系统。该系统具有以下特色与创新之处:① 将被控对象虚拟化和可编程化,使得控制对象可根据知识点任意构建,同时与教室投影系统相结合,使得实验过程更加直观和生动;② 设计了虚拟被控对象的硬件接口,便于开展硬件知识的教学和学生动手能力的锻炼;③ 除了I/O接线,其他连接全部采用无线通信方式实现,使得每个学生都能参与到实验的各个环节;④ 整个实验系统小巧、轻便、易携带,便于教师在课堂教学中使用。该实验系统的实现与应用,解决了翻转课堂中难以开展“以学生为中心”的实践教学问题,让实验真正进入课堂,同时也极大地提高了学生的学习兴趣,为良好的教学效果奠定了基础。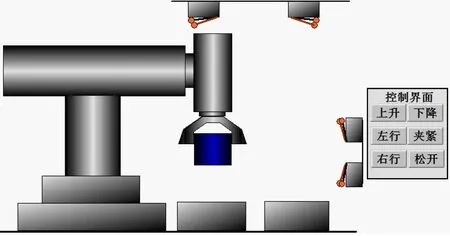

4.3 系统整体实现
5 结 语
猜你喜欢
军民两用技术与产品(2022年4期)2022-06-28 02:03:04舰船科学技术(2022年10期)2022-06-17 06:26:50仪器仪表用户(2021年10期)2021-11-27 08:25:54机电工程技术(2018年10期)2018-12-06 02:26:38制造技术与机床(2018年9期)2018-09-19 06:48:16海外华文教育(2017年6期)2017-08-07 03:11:00水电站机电技术(2016年1期)2016-02-28 14:21:50汽车与新动力(2014年5期)2014-02-27 12:10:41物理与工程(2011年5期)2011-03-25 10:03:33
