基于深度学习理论的大数据多尺度状态监测方法研究
2019-11-09 01:12潘锦锋
长春工程学院学报(自然科学版) 2019年3期
潘锦锋
(泉州信息工程学院,福建 泉州 362000)
0 引言
随着我国经济水平的不断提升,我国现代化工业也在飞速地发展。通过机械的不断更新,技术的不断换代,现代化工业的系统结构复杂程度与集成度越来越高,其对设备的可靠性、安全性等性能提出了更高的需求,因此,需要对设备状态进行多尺度的监测。随着信息化技术的推进,信息系统的建立为设备状态的多尺度监测提供了大数据的支撑,也为其提供了良好的平台。现今,大数据多尺度状态监测方法已经是科学家研究的重点课题之一[1]。
就现有的研究结果来看,国外对工业设备状态监测方法的研究较早,得到了很多的成果。现今使用较多的工业设备状态监测方法主要有直接状态监测方法与基于机理模型的状态监测方法[2]。其中,直接状态监测方法主要是对设备状态参数进行直接测量,实质上是一种直观有效的状态监测方法,并且设计并应用了多种性能出众的新型传感器设备;基于机理模型的状态监测方法主要是以设备的机理模型为基础,可以对设备的本质进行深入的观察,并且随着设备的不断变化,该模型可以进行逐渐的修正,使监测的结果更加精确。但是目前这两种方法均存在着监测精准度低、参数重构系数小的缺陷,无法适应现今社会对其的需求,为此引入深度学习理论对大数据多尺度状态监测方法进行相应的设计。深度学习理论是机器学习的技术与研究领域之一,主要是通过构建阶层结构的人工神经网络,在计算机系统中实现人工智能。通过深度学习理论的引用,可以极大地提升大数据多尺度状态监测方法的性能,同时设计仿真对比实验对其性能进行相应的验证与分析。
1 大数据多尺度状态监测方法设计
提出的大数据多尺度状态监测方法主要是根据信息系统提供的大数据,对满足状态参数重构条件的状态监测函数进行相应的构造,对工业设备进行相应的状态监测,同时通过基准模型以及异步信息融合的残差对设备状态进行多尺度监测,其流程图如图1所示。
1.1 数据预处理
对于设备信息系统中的大数据来说,其均存在着大量的噪声,并且还存在着不完整的现象,为了可以对设备进行更加精准的监测,首先必须对大数据进行预处理,可以极大地提升大数据的质量与监测的效率[3]。
数据预处理主要分为4个步骤,分别为数据清洗、数据集成、数据变换与数据规约。其中,数据清洗指的是对大数据进行平滑处理,将其中的噪声数据进行识别与去除,同时删除其中的孤立点,对大数据中的空缺值进行相应的处理;数据集成主要是将不同数据来源的大数据依据同样的规则整合到同一数据存储体系中,方便后续大数据的使用;数据变换指的是采用数据概化、平滑聚集、规范化等方式将数据形式进行适当的转换,方便后续的使用;数据规约指的是对获得的数据集的规约表示,主要的作用是对数据的完整性进行保障。

图1 大数据多尺度状态监测方法流程图
通过上述过程完成了数据的预处理,为下述基准模型的构建提供数据支撑。
1.2 构建基准模型
以上述预处理后的数据为基础,采用深度学习理论对基准模型进行构建。基准模型主要是对设备的运行数据、设计参数等通过一定的机理建立联系,目的是对工业设备参数建立的对应准则进行相应的构建,为状态监测提供参考信息。在设备运行过程中,对基准模型提供的参考信息与可测信息进行比较,可以构造相应的残差序列。若是工业设备正常工作,则残差几乎为零,反之,则表示设备运行出现异常[4]。
设备在运行过程中,经常会出现不一致的状况,因此,在构建基准模型时,需要同时构建稳态工况与动态工况基准模型。
稳态工况基准模型主要是利用提取的稳态工况大数据建立的模型,其中只包含设备稳态运行时的参数对应关系。
稳态工况判定公式为
(1)
式中:δxi表示的是变量xi的阈值;xi,max、xi,min分别表示的是在时间区间[t1,t1+Δt]内变量的最大值与最小值;xi,e表示的是稳态工况下,变量的额定值;δk表示的是波动阈值。
动态工况基准模型指的是利用设备动态工况大数据建立的模型[5]。在设备运行的过程中,其动态工况数据占据着大比例,因此,该模型主要是对此数据关系进行表示。
为了降低设备延迟、惯性等原因导致的建模误差,采用深度学习理论建立该模型,对模型的品质进行相应的改善。深度学习理论模型如图2所示。

图2 深度学习理论模型
通过上述过程完成了基准模型的构建,为最终的状态监测提供参考信息。
1.3 残差及其信息粒化
以上述构建的稳态工况基准模型与动态工况基准模型为依据,将运行数据代入到稳态工况、动态工况基准模型中可以得到相应运动状态的预测值,获取表达式为
(2)
式中:yi,preSTD表示的是稳态工况基准模型预测值;fSTD表示的是稳态模型预测值计算参数;(x1′,x2′,…,xm′)表示的是稳态运行数据;yi,preDYM表示的是动态工况基准模型预测值;fDSM表示的是动态模型预测值计算参数;(x1,x2,…,xn)表示的是动态运行数据。
将式(2)得到的数据与实际运行数据进行比较,得到残差为
(3)
由于大数据的海量特性,为了保障数据处理的效率,将大数据进行并行处理,减少计算的时间。将上述得到的稳态残差与动态残差进行有机的结合,得到多个信息粒,再对信息粒进行并行计算,这样可以极大地降低状态监测方法的运行时间,减少运算资源的浪费[6]。
1.4 单一信息粒的异步信息融合
以上述得到的信息粒为基础,信息粒中包含稳态残差与动态残差,其两者属于异步信息,为了简化信息粒的计算复杂程度,采用卡尔曼滤波对异步信息进行相应的融合,得到融合残差[7]。具体的过程如下所示:
假设设备状态参数是线性关系,以稳态残差为依据,采用回归分析方法建立融合残差差分方程,如式(4):
xk=Axk-1+Buk-1+wk-1+vk-1,
(4)
式中:xk表示的是卡尔曼滤波参数;A、B表示的是差分方程参数;wk-1、vk-1表示的是激励噪声与观测噪声的矩阵。
根据式(4)确定了卡尔曼滤波参数,以此为基础,对融合残差进行计算,得到
(5)
式中I表示的是融合因子。
1.5 融合残差的多尺度分析
以上述得到的融合残差为依据,采用小波变换方法对其进行相应的处理与分析。融合残差是随着状态参数的变化而变化的,同时还会受到多种因素的干扰,导致融合残差中含有大量的噪声,其会对状态监测结果产生较大的不利影响[8]。
设备的状态参数具有缓变性,当干扰因素与状态参数的频率不同时,可以采用小波变换的方式对多分辨特性进行相应的分析,将其分解到不同的尺度上,利用尺度与频率的对应关系,对状态参数进行相应的提取,同时对其中包含的噪声进行相应的滤除[9]。滤除的过程如图3所示。
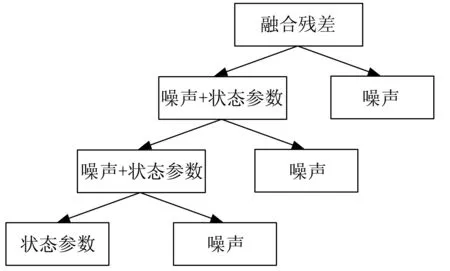
图3 融合残差噪声滤除流程图
通过上述过程对融合残差中的噪声进行了滤除,得到了状态参数,并对其进行了多尺度分析,为下述状态监测参数的构建提供了数据支撑。
1.6 状态监测参数的重构
以上述得到的状态监测参数为依据,采用多层次提取算法对状态监测参数进行重构。
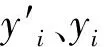
在设备的运行过程中会发生大量的情况,设备会发生改变,或者根据实际的工作环境进行相应的调节,这些都会使状态监测参数发生相应的变化。影响因素的出现通常情况下是不可预知的,一般为高频脉冲,为了提升状态监测的精准度,对融合残差分解过程中不同尺度的信息进行提取,以此为基础,对状态监测参数进行相应的重构[10]。
状态监测参数的重构主要是按照机理分析来进行,并将实际的工作情况考虑在内。状态监测参数重构流程如图4所示。
图4 状态监测参数重构流程图
状态监测参数重构过程为
(6)
式中ξ表示状态监测参数重构系数。
通过上述过程实现了大数据多尺度状态的监测,可以极大地对设备的状态进行及时的监测与维修。
2 大数据多尺度状态监测方法性能测试
上述过程实现了大数据多尺度状态监测方法的设计,但是对其是否可以解决现有方法存在的问题还不确定,因此,需要设计仿真对比实验对大数据多尺度状态监测方法的性能进行测试。
在仿真对比实验过程中,主要采用本文方法与现有的直接状态监测方法以及基于机理模型的状态监测方法进行对比实验,通过监测精准度与参数重构系数两个指标作为各种方法的性能指标。具体的实验结果分析过程如下所示。
2.1 监测精准度对比分析
通过实验得到检测精准度对比情况见表1所示。

表1 检测精准度对比情况表
如表1,本文方法的监测精准度远远高于现有的两种方法,其最大值可以达到90%。
2.2 参数重构系数对比分析
参数重构系数越大则表示状态监测参数重构性能越好。通过实验得到参数重构系数对比情况如图5所示。
如图5所示,提出方法的参数重构系数远远的高于现有两种方法,其最大值可以达到9.2。
通过上述实验结果可知,提出的大数据多尺度状态监测方法极大地提升了监测精准度与参数重构系数,充分说明本文提出的大数据多尺度状态监测方法具备更好的性能。
3 结语
大数据多尺度状态监测方法极大地提升了监测精准度与参数重构系数,可以对设备的状态进行及时的监测与维修。但是实验过程中忽略了实际情况中的干扰因素,导致实验结果与实际结果存在着少量的差距,为此,需要对大数据多尺度状态监测方法进行进一步的研究与优化。

图5 参数重构系数对比情况图
猜你喜欢
网络安全与数据管理(2022年3期)2022-05-23
哈尔滨工业大学学报(2022年5期)2022-04-19
摄影世界(2022年1期)2022-01-21
北京航空航天大学学报(2020年10期)2020-11-14
内蒙古民族大学学报(社会科学版)(2020年2期)2020-11-06
自动化学报(2019年6期)2019-07-23
知识经济·中国直销(2018年12期)2018-12-29
商周刊(2017年6期)2017-08-22
太空探索(2016年5期)2016-07-12
中国惯性技术学报(2015年1期)2015-12-19