
基于精细去取向角的PolSAR图像非监督分类方法
2019-11-09 03:18张省
遥感信息 2019年5期
张省
(山东省国土测绘院,济南 250013)
0 引言
地物分类是极化合成孔径(polarimetric synthetic aperture radar,PolSAR)的一个重要应用。在过去30年之内,许多监督分类方法和非监督分类方法被提出[1-10]。监督分类方法需要每一类地物的地面实况作为训练集,而地面实况在诸多应用中是无法轻易得到的。所以,非监督分类方法得到了很多学者的关注。非监督分类方法可分为基于统计分布特性和基于物理散射机制两类。
基于目标的统计分布特性的PolSAR目标分类方法的思路是把目标统计分布的差异性用可测量的距离表示,把统计分布相似性较高的目标分成一类。对于单视复数据的最大似然分类,Kong等提出了基于复高斯分布的距离测量[4]。对于以相干矩阵表示的多视数据的分类,Lee等提出了基于复Wishart分布的距离测量[2]。基于复Wishart分布距离测量的分类器得到广泛应用。Ferro-Famil等把Lee等人提出的复Wishart分类器扩展到多极化以及极化干涉应用中[9]。
基于物理散射机制的目标分类方法利用目标分解的方法把目标分解成若干常见的散射机制类型,优势是每一类目标有确定和清晰的散射机制。van Zyl等提出把地物分成单次散射、双次散射和漫散射[6]。Cloude和Pottier等提出了基于特征分解的目标分解的非监督分类方法。该方法利用分解参数散射熵H和Alpha角构建二维分类平面,把目标分成8类,每一类有明确的散射机制[7]。
为了充分发挥基于统计分布特性的分类方法和基于物理散射机制的目标分类方法的优势,Lee等提出把二者结合起来的PolSAR目标非监督分类方法[8, 10]。该类方法利用Cloude-Pottier分解或模型分解进行初分类,然后利用复Wishart分类器进行迭代分类结果。但是基于Cloude-Pottier分解作为初分类的分类方法的缺点是最终迭代的结果和初分类的结果可能差异很大,因为复Wishart分类器是基于统计分布的,而统计分布和散射机制之间并没有被证明是强相关的。基于模型分解作为初分类的分类方法可以避免这一问题,因为使用复Wishart进行合并类和迭代类时仅在其所属的某主散射机制中进行。
作者发现Lee等人提出的上述基于模型分解作为初分类的非监督分类方法的一个缺点是把取向角较大的建筑物错误分类成树林。究其原因,作者发现其进行初分类的模型分解是Freeman和Durden提出的三分量分解[11],而其三分量分解会把取向角较大的建筑物的散射机制分解成体散射,并且在迭代过程不会改变其主散射机制。虽然采用去取向角操作可以补偿目标的取向角带来的影响,但是Lee等人提出的去取向角操作对取向角较大的建筑物的取向角补偿效果不好,取向角较大的建筑物在分类中仍会被错误分类成树林。朱飞亚等提出了一种精细去取向角方法[12-13],重点解决或缓解去取向角较大的建筑物被错误识别成体散射为主的目标的问题。受此启发,我们把朱飞亚等提出的去取向角方法应用于模型分解,并基于去取向角之后的模型分解的结果,实施复Wishart分类器,提出了一种PolSAR目标非监督分类方法,提高了取向角较大的建筑物的正确分类率。
1 精细去取向角方法
当散射面的法向量不在入射平面内时,散射面存在一定的取向角,并会产生额外的交叉极化散射。为了减轻或消除这一影响,必须进行去取向角或取向角补偿操作。去取向角或取向角补偿操作在极化参数估计、目标分解和目标分类等应用中扮演重要的角色。
经常使用的去取向角方法为Lee等人提出的方法,基于相干矩阵估计出一个取向角,并对相干矩阵进行旋转操作[14-15]。Lee等人方法的一个缺点是,对于取向角较大的目标去取向角的效果不好[16]。
朱飞亚等提出了精细去取向角的方法,把分辨单元内的目标重建为3个目标,并分别去取向角[12-13],对取向角较大的目标取得了更好的去取向角效果。该方法采用目标分解的方法把目标重建为3个分别用相干矩阵T1、T2和T3表示的单目标,分辨单元内的所有散射体均映射到这3个单目标上,然后分别估计3个单目标的取向角θ1、θ2和θ3,最后对3个单目标分别去取向角,得到去取向角之后的目标T′:
(1)
式中:R(θi)为取向角旋转矩阵。
2 复Wishart分类器
对PolSAR而言,散射矩阵S包含了全部极化信息
(2)
式中:HV表示垂直极化发射和水平极化接收。把散射矩阵S表示成Pauli基下的散射矢量k
(3)
对于非相干散射的情况,散射信息可以用相干矩阵T表示
T=〈k·k*T〉
(4)
式中:〈·〉表示统计平均。相干矩阵T服从复Wishart分布,假设V=E[T],相干矩阵T的概率密度函数为
(5)
式中:对收发互易情况来说q= 3;Tr表示矩阵的迹;n为视数;K为归一化因子。
基于Wishart分布的最大似然分类器,Lee提出了相干矩阵T和第m类的类中心Vm之间的距离测量[8]
(6)
式中:P(m)为第m类的先验概率。类中心Vm的定义为该类所有点的中心
Vm=E[T|T∈ωm]
(7)
式中:ωm为所有属于该类的点的集合。一般地,由于无法确定类的先验概率,可以假设所有类的先验概率相等。所以,式(6)可以改写为
(8)
该距离和视数无关。
一个点可以被分到第m类中,如果
d(T,Vm)≤d(T,Vj)j≠m
(9)
Lee还进一步推导了两个类之间的距离Dij。
3 提出的PolSAR非监督分类方法
本文提了一种基于精细去取向角的PolSAR目标非监督分类方法,首先对相干矩阵T进行精细去取向角操作,然后进行模型分解,得到面散射、双次散射、体散射等三大类,在每一大类内部按照散射功率值的大小分成若干小类,然后利用基于Lee提出的复Wishart统计分布的距离进行合并类和点的重分类,得到最终的分类结果。
本文的贡献是把精细去取向角操作引入到PolSAR非监督分类方法中,可以很好地处理取向角较大的建筑物区域,提高取向角较大的建筑物的正确分类率,亦是和Lee的基于模型的非监督分类方法的区别。本文的方法亦继承Lee分类方法在迭代分类结果时保持主散射机制不变的优点。
本文提出的PolSAR非监督分类方法的详细步骤见图1。分类步骤详述如下:
①初分类。
滤波:对用相干矩阵T表示的PolSAR 进行斑点滤波。本文采用Refined Lee滤波方法进行滤波[14],平滑和抑制斑点噪声。
精细去取向角:实施朱飞亚等人提出的精细去取向角操作,得到去取向角之后的相干矩阵。
模型分解:基于精细去取向角之后相干矩阵,实施三分量模型分解,得到三大类目标,分别为面散射、双次散射和体散射。
把每一大类按照散射功率大小分成若干小类,比如30小类。
②合并类。
计算每一小类的类中心。在每个大类中,利用Lee提出的方法计算任意2个小类之间的距离Dij。如果2个小类之间的距离最小,则合并为一个小类,直至达到预设的小类的数目。
③Wishart分类。
计算每一小类的中心:在每一大类中,利用公式(8)计算所有点到任意小类中心的Wishart距离。
迭代重分类:在每一大类中,把点重新分到距离最近的类中心的小类中去,并把此过程迭代2~4次,直至达到迭代终止条件。迭代终止条件可以是更变类别的点的百分比,或某迭代次数。
④着色。
每一类目标的显示颜色可以帮助方便地从视觉上解译其散射机制和类别。设置自动着色机制,给每一小类自动着色。面散射以蓝色显示,双次散射以红色显示,体散射以绿色显示。对于每一大类中的不同小类,则用其颜色深浅表示。
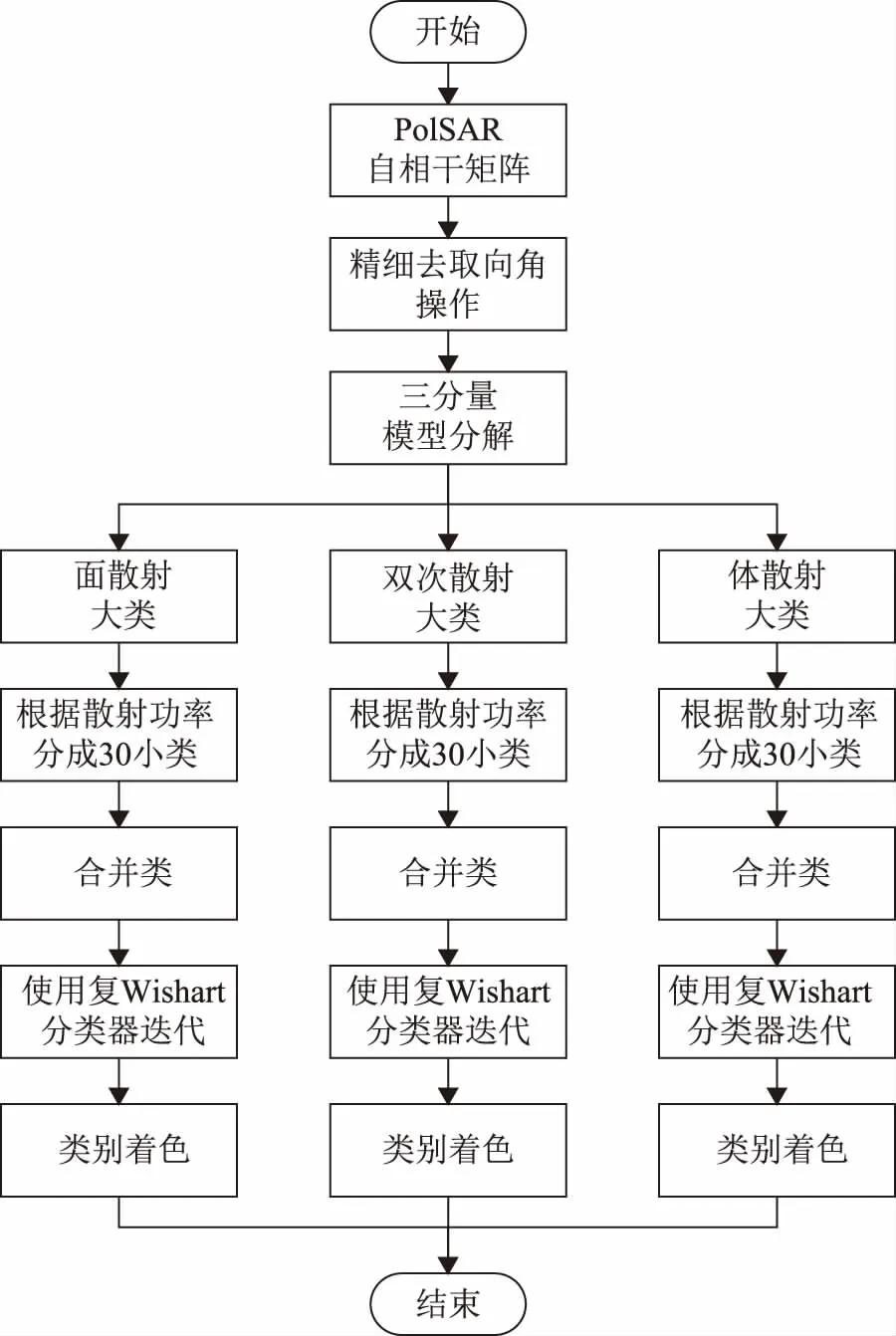
图1 本文提出的分类方法流程图
4 实验验证
本文通过处理星载Radarsat-2和机载EMISAR的PolSAR数据验证了本文提出的分类方法的有效性和优越性。本文采用的数据之一是加拿大C波段星载全极化合成孔径雷达Radarsat-2于2008年4月9日采集的美国旧金山San Francisico区域的数据。该区域经常被很多文章作为典型区域进行研究。原始数据是单视复数据,并截取了其中1 561×1 321的数据进行处理,本文采用了7×7的Refined Lee滤波器来降低斑点噪声水平。本文使用的第二个数据是丹麦的机载PolSAR系统EMISAR与1998年4月17日采集的Foulum地区的数据,截取的数据大小为900×900,并采用7×7的Refined Lee滤波器来降低斑点噪声水平。
对于Radarsat-2数据,作为对比,PolSAR数据对应的光学图像如图2(a)所示(2018年4月21日采集)。可以看出,场景中包含海洋、不同排列朝向的建筑物、中央公园(矩形公园区域)、旧金山大桥等典型目标。对于EMISAR数据,其对应的光学图像如图3(a)所示(2005年7月31日采集)。可以看出,场景中包含树林、稀疏的不同朝向的建筑物区域、草地等。图2(b)和图2(c)及图3(b)和图3(c)分别为Lee等进行去取向角使用的取向角和朱飞亚等使用的主特征矢量的取向角。由于Lee等使用的取向角为分辨单元所有散射体的平均取向角,主特征矢量的取向角由于是分辨单元内的散射体的取向角,所以平均取向角比朱飞亚等人使用的主特征矢量的取向角更均一化。图2(d)、图2(e)和图2(c)及图3(d)、图3(e)和图3(f)分别为Freeman-Durden三分量分解、采用Lee等去取向角的三分量分解、采用朱飞亚等去取向角的三分量分解的结果。从图中可与看出,朱飞亚等提出的去取向角方法对图中大取向角建筑物区域的取向角补偿的效果更好。
对于Radarsat-2数据,从模型分解结果可以看到,海洋区域的颜色为蓝色,表明面散射占优;建筑物区域的颜色为红色,表明双次散射占优;中央公园区域的颜色为绿色,表明体散射占优。对于EMISAR数据,树林区域的体散射占优呈现绿色;建筑物区域的双次散射占优,朱飞亚等的去取向角方法得到的结果呈现红色。
和Lee等人提出的分类方法类似,本文把三大类的每一大类中的点根据散射功率各分成30小类,并最终合并成15小类。图4和图5为Lee分类方法、采用Lee去取向角的分类方法、本文采用朱飞亚等精细去取向角的分类方法的结果。可以看出本文提出的方法在建筑物区域可以把更多的点分到双次散射大类中,即显示的红色更深。特别是在图4中画圈的部分以及图5右下角的U形建筑物区域,该区域属于取向角较大的区域(图的左右方向为距离向),本文提出的分类方法把更多的点正确地分到双次散射大类中,即取向角较大的区域的正确分类率更高。
从图4(c)可以看到,在中央公园区域,本文提出的分类方法得到结果的点分类成体散射的概率较Lee等提出的方法的结果分类成体散射的概率较低,因为本文方法采用了精细去取向角操作,降低了每个点的体散射功率比例。另外,数据采集时间尚属早春,中央公园树木的叶片尚未长出,且树木间距较稀疏,体散射较弱,故其绿色较弱是合理的。图4(d)为中央公园右半部分的光学图像,可以看出有相当数量的建筑物等人造目标,所以图4(c)中的相应区域显示为红色。值得关注的是图4(a)中中央公园区域的绿色整体较深,因为Lee等的方法使用的三分量分解得到的体散射是过估计的,这是三分量分解固有缺点,即其显示的绿色不应这么深。然而,任何方法都不可能适应所有情况。图5(c)的M形树林区域出现部分红色,亦因为4月份树木的树叶尚未长出,体散射较弱,树干和地面形成的双次散射得到体现。

图2 Radarsat-2数据光学照片、取向角、模型分解结果

图3 EMISAR数据光学照片、取向角、模型分解结果

图4 本文分类方法和Lee等分类方法Radarsat-2数据结果比较
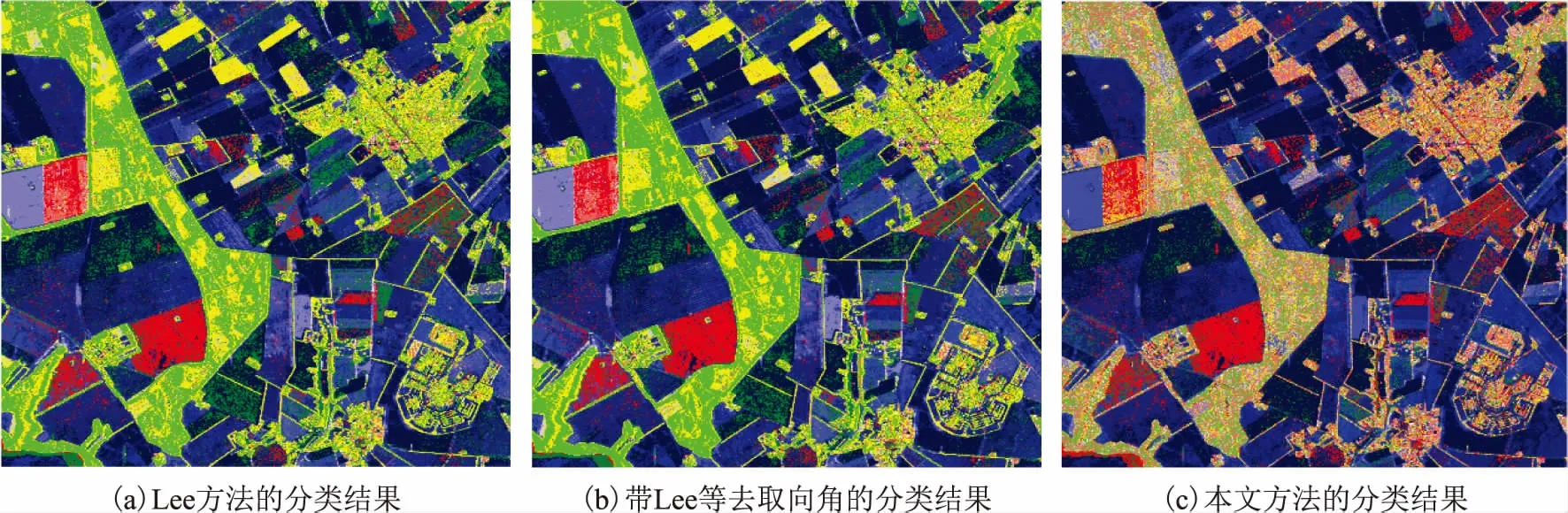
图5 本文分类方法和Lee等分类方法EMISAR数据结果比较
5 结束语
在Lee等人提出的PolSAR非监督分类方法的基础上,本文提出了一种基于精细去取向的PolSAR目标非监督分类方法。首先,对数据进行精细去取向角和三分量模型分解,作为初分类结果;然后,在每一大类中,把点分成小类,并进行合并类;最后,使用基于复Wishart统计分布的分类器对分类结果进行迭代。用真实PolSAR数据进行验证,试验结果表明,本文提出的方法可以提高取向角较大的建筑物的正确分类率。
猜你喜欢
汽车与驾驶维修(维修版)(2021年6期)2021-08-18
汽车与驾驶维修(维修版)(2021年6期)2021-08-18
铁道建筑技术(2021年4期)2021-07-21
黑龙江水利科技(2020年8期)2021-01-21
小学生学习指导(低年级)(2019年9期)2019-09-25
电子技术与软件工程(2017年14期)2017-09-08
计算机应用(2017年4期)2017-06-27
中学生数理化·高二版(2016年8期)2016-05-14
小天使·二年级语数英综合(2015年12期)2015-12-04
航天返回与遥感(2014年5期)2014-07-31
