
一种适合降落序列影像的快速匹配方法
2019-11-09 03:18徐辛超李旭佳马钰刘少创焦慧慧
遥感信息 2019年5期
徐辛超,李旭佳,马钰,刘少创,焦慧慧
(1.辽宁工程技术大学 测绘与地理科学学院,辽宁 阜新 123000;2.中国科学院遥感与数字地球研究所,北京 100101)
0 引言
嫦娥三号着陆器在下降过程中,其下方携带的降落相机以不低于10帧/秒的频率拍摄影像,整个降落过程获取了4 000余幅降落影像[1-3]。降落序列影像的快速匹配对于着陆器着陆轨迹的恢复、着陆区三维地形重建和巡视器路径规划等任务有着重要的意义[4-5]。与嫦娥一号和二号遥感影像数据相比,降落序列影像具有更高的分辨率,且着陆器携带的姿态测量设备和激光高度计等设备可以获取影像拍摄时刻的姿态和高度,这些都为降落序列影像的快速匹配提供了基础条件。
现有的降落序列影像匹配方法中,由于考虑到降落影像间发生了尺度变化,因此,往往采用SIFT、SURF或者其改进方法实现。刘斌等2014采用SIFT算法进行了降落影像的匹配,并开展了嫦娥三号着陆轨迹恢复[6]。贾阳等采用SIFT方法进行了降落影像匹配,并开展了嫦娥三号着陆点的定位[7]。徐辛超等提出了一种改进SIFT的降落影像匹配方法,重构了降落过程得几何模型,并将其用于匹配约束,提高了匹配效率[8]。马钦华结合Forstner与SIFT组成一种改进的算法,实现了降落序列影像的特征点初步匹配[9]。孙泽洲等利用降落影像序列通过SIFT(scale-invariant feature transform)方法实现嫦娥三号系统着陆点高精度定位[10]。万文辉等通过降落序列图像间的SIFT匹配,完成了着陆器在低分辨率降落图像上的定位[11]。Xu等通过下降序列影像结合明暗恢复形状技术完成了着陆区地形的初步重建[12]。上述方法虽然效果比较理想,但是由于其实现过程中需要经过较为复杂的特征描述过程,导致程序耗时较多,程序时效性较差。为了减少降落序列影像匹配过程的耗时,针对着陆器悬停及后续过程拍摄的降落影像的成像特点,提出了一种降落序列影像的快速匹配方法,为后续着陆轨迹恢复、着陆区地形重建等任务提供基础。
1 Moravec特征点提取
考虑到降落序列影像的拍摄特点,各影像间存在较大的尺度差异,但是旋转等情况较少,因此,采用传统的特征点提取方法结合相关系数匹配实现其快速匹配。传统特征点提取方法中Moravec方法实现过程简单,耗时较少,因此,后续匹配中以该方法为基础展开。
Moravec于1977年提出了直接利用图像灰度信息探测特征点的方法,其基本思想是计算影像中的某个局部窗口的灰度方差的变化,确定兴趣值大于某一阈值的点作为特征点。该方法的具体实现过程如下:
①确定当前像素位置(c,r),并确定一定大小的窗口w1,用于计算后续灰度梯度,并确定k值的取值。一般情况下窗口大小取值为7×7、9×9、11×11等。
②确定计算各像元在4个方向的兴趣值,并确定最小方向的兴趣值作为该点的最终兴趣值,公式如下:
(1)
③给定一经验阈值,将兴趣值大于阈值的点作为候选点。
④确定一定大小的窗口w2,选取候选点中的极值点作为最终特征点。
2 降落序列影像快速匹配
降落序列影像是着陆器在下降过程中连续拍摄的影像。着陆器在悬停后的下降过程中的获取的降落影像只存在较大尺度变化,相互之间的旋转角度非常小,且处于近似垂直状态拍摄。针对降落影像的特点,提出了一种降落序列影像快速匹配方法。
提出的快速匹配方法主要过程包括影像尺度统一、初步特征点提取、几何约束、相关系数匹配及误匹配剔除、匹配点坐标计算5个部分。快速匹配方法的整体实现流程如图1所示。
1)影像尺度统一。首先选取待匹配的降落影像,并获取降落影像的拍摄高度。拍摄高度可以根据对应的激光高度计数据获取。
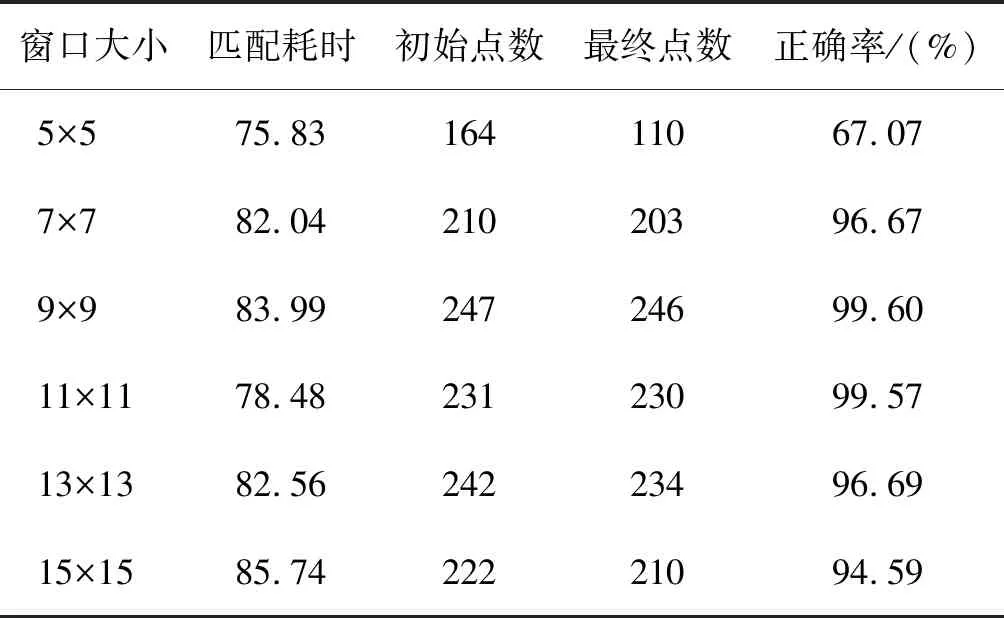
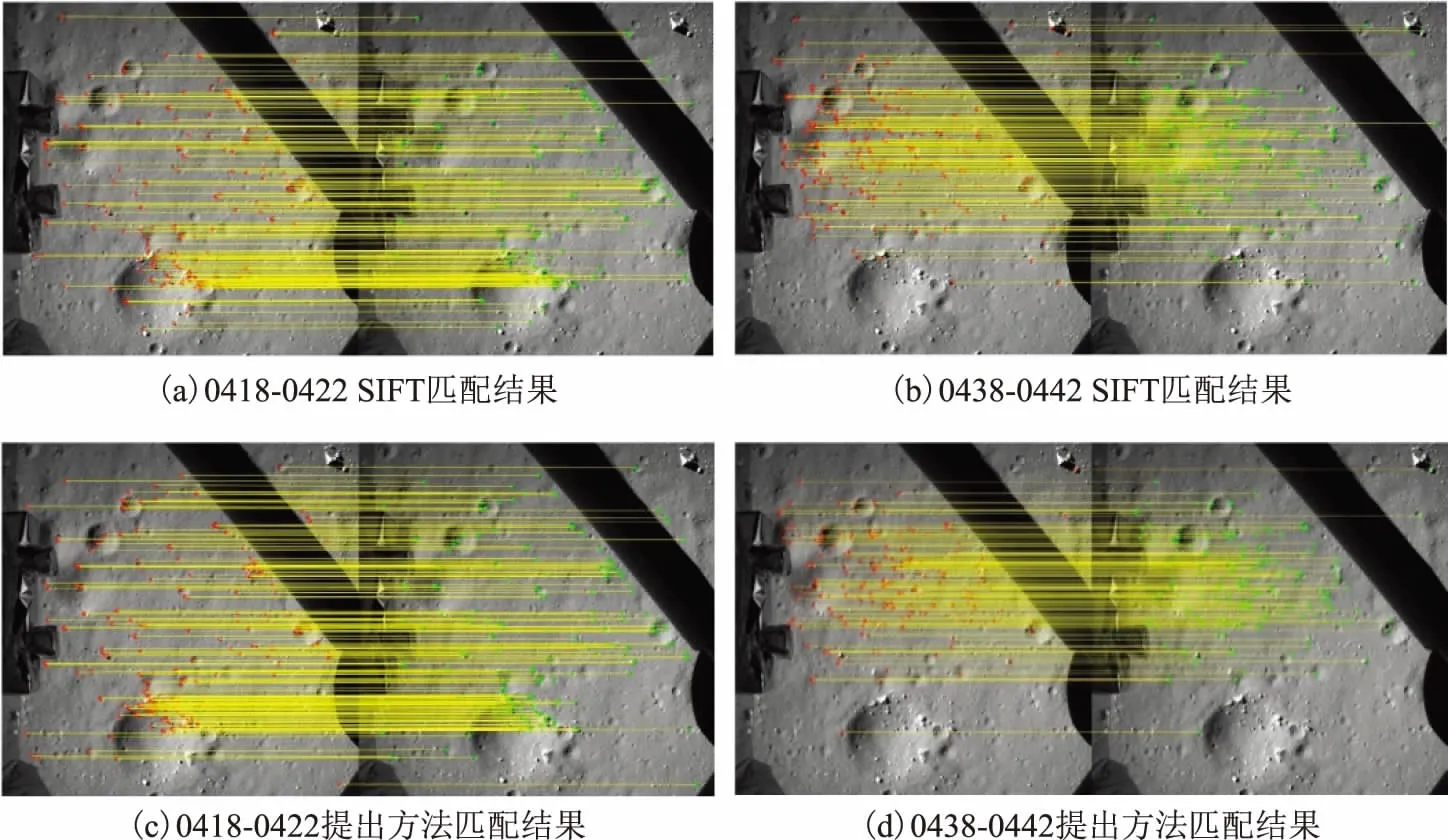
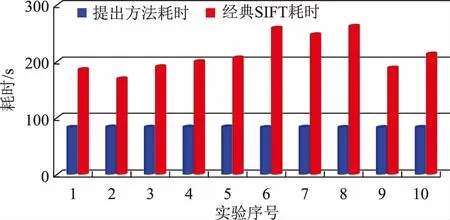
根据影像1和影像2对应的高度数据,计算两者间的尺度差异。假设影像1的拍摄高度为h1,影像2的拍摄高度为h2,且h1 m=h2/h1 (2) 由拍摄高度可以得到影像1的覆盖范围小于影像2,但影像1的分辨率高于影像2。考虑到进行尺度变换后再进行匹配的过程中,得到的匹配点坐标还需要重新转换为原始影像坐标。如果将影像1参照尺度比例进行缩小,则在还原原始影像坐标过程中,无法客观还原出准确的原始点位。因此,最终实现时采用了将拍摄高度较高的影像2按照尺度比例进行放大的操作,方便后续匹配点坐标还原。根据尺度比例,将影像2放大至与影像1同一尺度后方可进行特征点提取操作。影像2尺度变化过程中采用双线性插值作为重采样方法。 图1 快速匹配技术路线 2)Moravec特征点提取。采用Moravec算子分别对影像1和尺度变化后的影像2进行初步特征点提取。为了尽可能多地提取特征点,对于阈值的选择时要适当取小阈值,本文中选取的阈值为200。特征点提取窗口w1过小对于特征点提取不够准确,窗口过大会影响程序执行的效率,因此,算法执行过程中,需要综合考虑匹配点的数量,程序耗时和后续误匹配数量3种因素,最终确定最佳的窗口大小。 降落影像中着陆器发动机部分在影像中始终出现,为了不影响最终匹配效果,设置了掩模用于该部分的特殊处理,如果特征点出现在该部分,则剔除该特征点。 3)匹配约束。为尽可能地提高匹配效率,采用了前期研究提出的几何约束剔除误匹配。着陆器在悬停后的降落过程近似呈垂直状态,所拍摄的影像变形较小且易于处理,因此进行地形重建、轨迹恢复时主要采用这一阶段拍摄的影像作为数据源。着陆器悬停后的降落过程近似几何结构如图2所示。假设S1、S2分别为影像1和影像2的摄影中心,二者近似在一条垂线上。h1、h2分别为二者的拍摄高度,P1、P2分别为月面点P对应的像点,其在对应的相像平面直角坐标系下的坐标分别为(x1,y1)和(x2,y2),由图2可得: x2≈x1·h2/h1 (3) 图2 降落过程匹配约束示意图 同理可得y方向的相似约束条件。根据文献[12]中的匹配约束条件,最终进行特征匹配点搜索时,首先确定影像1中待匹配点位置,然后判断影像2中的匹配点是否在其周围±5个像素大小的搜索范围,如果超出该范围则放弃该匹配点对,否则认为是可靠的匹配点。 4)相关系数匹配及误匹配剔除。采用相关系数作为匹配测度进行了左右影像的匹配,匹配模板窗口大小取值为11×11。相关系数阈值设置较大会导致匹配点数量过少,阈值较小则会导致误匹配点数量增多,影响匹配效果,需要经过多次试验,确定最佳的相关系数阈值。最后采用随机抽样一致算法(random sample consensus,RANSAC)进行了误匹配点的剔除。 5)原始匹配点坐标计算。由于影像2进行了尺度变化,初步匹配点的坐标实际为变换后的坐标,因此,还需要根据尺度比例将其坐标返回至原始降落影像2中。假设变换后的影像2中匹配点坐标为(x′,y′),原始影像中最终匹配点坐标为(x,y),则二者之间存在以下变换关系: (4) 为了验证提出方法的执行效果,设计了3种类型的对比实验。①取多个特征点提取窗口开展降落序列影像匹配,以确定特征点提取时的最佳窗口大小。②取不同的相关系数阈值,结合匹配点数量、程序耗时和误匹配率等,确定最佳相关系数阈值。③采用提出的快速匹配方法和SIFT匹配方法开展多组影像的匹配,分析提出方法的匹配效果。图3(a)、图3(b)、图3(c)和图3(d)为部分降落影像,图3(e)为掩模,实验影像编号右左至右分别为0418、0422、0438与0442,最右侧图像为掩模。 图3 实验影像与掩模 为了验证窗口大小对匹配结果的影响,确定最佳匹配窗口,选取了5×5、7×7、9×9、11×11、13×13和15×15窗口大小,对下降影像0418-0422进行了测试。表1为提出方法针对不同窗口大小在相关系数阈值为0.92时,采用RANSAC算法剔除误匹配后的匹配点数量、匹配耗时和正确匹配率。文中实验所用电脑配置为:CPU主频3.5 GHz,内存4 GB,硬盘500 GB。下文所有表中的时间单位均为s。 表1 不同窗口大小匹配性能统计 由表1的统计结果可以得出:匹配程序耗时与随着窗口的增大而增加,窗口大小为5×5时初始匹配点数最少,仅为164个,同时其误匹配率最高,为32.93%;窗口大小为其他值时,匹配点的数量与窗口大小没有固定关系,窗口大小为9×9时获取的匹配点数量可以达到247个,误匹配率最低,仅为0.40%。综合考虑程序耗时、匹配点数量与匹配正确率,最终选定匹配窗口大小为9×9。 为了验证阈值对匹配结果的影响,选取了6个阈值,对下降影像0418-0422进行了测试。表2为提出方法在不同相关系数阈值条件下,采用RANSAC算法剔除误匹配后的匹配点数量、匹配耗时和正确匹配率。 表2 不同阈值匹配性能统计 由表2的统计结果可得:匹配程序耗时与相关系数阈值无固定关系,当阈值增大时,初始点数和最终点数均存在不同程度的减少,阈值为0.89时提取的特征点数量较多,最终匹配点数量也较多,但是也存在一定程度的误匹配,阈值为0.94时获得特征点数量最少,最终匹配点数量也最少,但是误匹配率也最高,阈值为0.90时,特征点数量较多,且误匹配率最少,因此,算法最终确定相关系数阈值为0.90。 在上述实验的基础上,最终在窗口大小为9×9,阈值为0.90时,采用嫦娥三号真实的降落影像开展了匹配实验,并对程序匹配耗时进行了分析。选取的降落影像范围由0418开始至0467结束,每隔5幅影像进行匹配,即0418-4022、4023-4027、0463-0467等进行匹配。表3为采用RANSAC算法剔除误匹配后,提出方法与经典SIFT 2种方法的初始匹配点和剔除误匹配后的最终匹配点数量,图4(a)和图4(c)分别为经典SIFT方法对0418-0422和0438-0442的匹配结果,图4(b)和图4(d)为提出方法对应的匹配结果。 针对不同降落影像,2种方法都可以取得较好的匹配结果,证明提出的方法是可行的。 表3 匹配性能统计 由表3可以得出:①提出的快速匹配方法正确率最低为92.89%,最高为99.60%,可见提出的方法可以有效的开展降落影像间的匹配,并且具有较高的稳定性;②提出的快速方法在采用RANSAC算法之前仍然存在少量的误匹配,主要是由于月面影像中纹理信息较传统影像特殊,存在大量的纹理重复或者匮乏的区域,导致几何模型约束匹配过程中的搜索范围内出现多余候选匹配点,导致误匹配出现;③SIFT算法的平均正确率为95.13%,提出方法的平均正确率为97.55%,改进方法提出的匹配点正确率高于经典SIFT方法,主要是由于采用了较为严密的几何模型约束匹配。 为了验证提出方法的方法的匹配效率,采用上述多组降落影像进行了匹配耗时测试,并与经典SIFT方法进行了对比分析,图5为2种方法的匹配结果耗时。 图4 不同方法匹配结果 图5 2种方法的匹配结果耗时 由图5可以得出,提出的降落影像快速匹配方法最大耗时为84.78 s,最少为83.53 s,平均耗时84.11 s。经典SIFT方法的最大耗时为262.89 s,最短为166.13 s,平均耗时为210.64 s,平均降低耗时126.53 s,且提出的方法匹配过程耗时更为稳定。以SIFT方法的耗时为基准,同组影像匹配中,提出的快速匹配方法效率最多提高了68.10%,最低提高了50.19%,平均提高约59.62%,由此说明提出的快速匹配方法对于不同降落影像间的匹配可以相对稳定的提高59%左右。 通过上述实验可以得出,同一阈值的条件下,匹配耗时随着窗口的增大而增加;而同一窗口大小时,匹配耗时与相关系数阈值无明显关系;与经典SIFT算法相比,提出的快速匹配方法可以大幅度减少匹配过程得耗时,并且可以获得数量稳定的特征点,进而为后续地形重建等任务提供基础。 针对现有降落序列影像匹配过程耗时较多,效率较低的问题,提出了一种适合降落序列影像的快速匹配方法。该方法以经典Moravec特征点提取方法为基础,通过尺度变换、匹配过程几何约束、相关系数匹配、坐标变换,最终实现了降落序列影像的快速匹配。通过真实降落影像匹配测试,得出特征点提取窗口大小为9×9、相关系数阈值为0.90时,可以获得的数量较多特征点。与经典SIFT匹配方法相比,提出的快速匹配方法可以大幅减少匹配耗时,且能够取得较为稳定的匹配结果。提出方法可以平均减少59%左右的匹配耗时,极大的提高了降落序列影像的匹配效率,且误匹配率小于SIFT匹配方法,证明本文提出的方法是有效和切实可行的。通过本文方法的改进可以为后续下降序列影像的应用提供了更好的基础。

3 匹配实验与结果分析

3.1 不同特征点提取窗口匹配结果分析
3.2 不同相关系数匹配结果分析

3.3 匹配性能测试与分析

4 结束语
猜你喜欢
内蒙古民族大学学报(社会科学版)(2020年2期)2020-11-06
航天器工程(2019年4期)2019-11-11
制造技术与机床(2019年9期)2019-09-10
成都信息工程大学学报(2019年5期)2019-05-21
伙伴(2019年12期)2019-01-17
西南交通大学学报(2018年6期)2018-12-18
北京航空航天大学学报(2017年4期)2017-11-23
太空探索(2016年5期)2016-07-12
探测与控制学报(2015年4期)2015-12-15
中学科技(2015年7期)2015-07-03
