一种船舶自动操舵仪语音交互器的设计
2019-11-09 01:44
武汉船舶职业技术学院学报 2019年3期
(武汉船舶职业技术学院,湖北武汉 430050)
船舶自动操舵仪[1]是一种能自动控制舵机以保持船舶按规定航路航行的设备,又称自动操舵装置。它是在通常的操舵装置上加装自动控制部分而成,船舶航行过程中,操舵仪必须时刻保持牢靠、低故障率,这是船舶航行安全的根本技术保证。 随着传感器技术的发展,来自GPS、北斗等卫星的位置信息、光纤罗经的航向信息、惯性导航设备的姿态信息,接入到自动操舵仪中,经过优化的控制算法,船舶已经能够按照计划的航迹线或迹向航行,极大地降低了船员的劳动强度。但是航行过程中,人员必须全程监控,主要根据操舵仪发出的单调枯燥的报警声、指示灯信号,结合屏幕显示的参数来判断船舶航行和设备运行状态,存在反应迟钝、信息要素不全、船员工作环境恶劣等问题。因此有必要在操舵仪中整合智能语音系统,使船员能够利用听觉,获取关键航行技术信息,改变枯燥、紧张的工作环境,更加方便地输入控制指令。
1 语音芯片
经过市场调研,XFS5152CE[2]是科大讯飞公司研发的一款高集成度的语音合成芯片,可实现中文、英文语音合成;并集成了语音编码、解码功能,可支持用户进行录音和播放;除此之外,还创新性地集成了轻量级的语音识别功能[3],支持 30 个命令词的识别,并且支持用户的命令词定制需求。 已经广泛地应用于车载调度终端、自动售货机、POS机、公交车语音报站器、智能仪表等设备中。功能如下:支持任意中文文本、英文文本的合成,并且支持中英文混读;支持语音编解码功能,用户可以使用芯片直接进行录音和播放;支持语音识别功能;芯片内部集成 80 种常用提示音效;支持 UART、I2C 、SPI三种通讯方式;支持多种控制命令;支持多种方式查询芯片的工作状态。

图1 XFS5152CE结构功能图
2 设计方案
船舶自动操舵仪作为最重要的航海仪器,在设计语音交互器中必须考虑其具有:高可靠性;以太网、CAN总线、UART串口等通用的对外的接口,方便接入与系统升级;较高的CPU性能,方便语音的识别与判断,发布准确的指令;成本低廉。因此,该系统由STM32F407VGT6控制器电路、XFS5152CE 语音电路、功放电路、麦克风电路和电源电路组成。
2.1 STM32F407VGT6控制器电路
STM32F407VGT6是意法半导体公司基于高性能的ARM®Cortex®-M4 32-bit RISC core内核,工作频率高达168MHz[4]。Cortex-m4核心具有单精度的浮点数运算单元FPU,支持所有单精度数据处理指令和数据类型。它还实现了一套完整的DSP指令和一个内存保护单元(MPU),以提高应用程序的安全性。包含了高速嵌入式存储器(闪存最多可达1MByte,最多可达192kByte SRAM),最多可达4kByte的备份SRAM,以及广泛的增强型I/O和外设,连到两个APB总线。具有标准和先进的通信接口,包括双CAN,以太网,USART,SPI,I2C等接口,方便与外围设备互联互通。
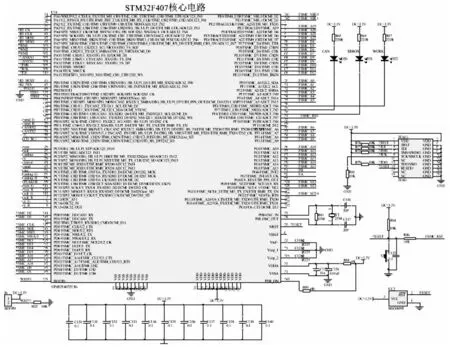
图2 STM32F407VGT6核心电路
该电路由STM32F407VGT6的核心电路、复位电路、以太网通信电路、双CAN通信电路组成,核心电路完成与语音芯片的交互,并且运行船舶控制指令的运行策略,根据语音设备,把控制指令翻译到船舶自动操舵仪内部的CAN网,或信息通信以太网上。复位电路起到上电复位CPU的作用。以太网通信电路主体物理芯片采用DP83848与CPU采用RMII方式交互数据[5],适用于信息通过以太网交互的自动操舵仪中。双CAN电路主体物理芯片采用具有隔离作用的ADM3053,适用于通过CAN网交互的自动操舵仪。
2.2 XFS5152CE 语音电路
XFS5152CE 语音电路由XFS5152CE核心电路、波特率配置电路组成,核心电路主要根据CPU发送的指令和编码,翻译成语音发送到功放电路,同时根据对MIC电路输入的语音进行识别,翻译成相应代码传送给CPU。波特率配置电路完成USART波特率的设置。
2.3 功放电路
功放电路主要由TPA3123D2功放驱动芯片构成。TPA3123D2是一个25瓦(每通道)高效,D类用于驱动单端配置或在一个桥接负载配置单声道扬声器立体声扬声器的音频功率放大器,该TPA3123D2可以驱动多至4个立体声扬声器。TPA3123D2消除了播放音乐时对外部散热器的需要。
2.4 麦克风电路
MEMS麦克风因为不受外界环境影响,输出灵敏度长期稳定,且一致性好,广泛替代ECM麦克风,成为市场主流,因此本设计中采用楼氏公司生产的SPH1642HT5H-1型模拟硅麦克风。其内部结构如图3所示:

图3 SPH1642HT5H-1内部结构
因其内部整合了电源管理、电荷泵、低噪音的输入缓冲、输出放大器,所以麦克风的外围电路设计非常方便,如下图4所示:

图4 硅麦外围电路
3 语音控制策略
现在的自动操舵仪普遍具有5种控制方式:简单、随动、航向自动、迹向自动、航迹自动,而各种操舵方式的选择必须满足一定的条件。简单操纵是船舶自动操舵仪控制中最保险的一种控制方法,只需要船舶驱动舵机的电磁阀正常工作,简单操纵就可以实现,是完全按照人的经验进行控制。随动操纵是船舶舵机跟随舵轮发出的舵角指令,舵机自动跟随,舵角反馈和舵角指令完备的情况下才能进行,而且由其他方式切入随动控制时,必须舵轮处于零度角,否则可能引起突然较大的转向,影响船舶航行安全。航向自动是在自动控制理论上,基于随动控制环,又添加了一个航向控制环,进入航向控制的条件是具备随动控制能力且具有可靠的航向信息来源。迹向控制是最近几年船舶才开始应用的操舵方式,是一种按照射线航行的方式,能够自动补偿风、流影响,自动航行在方向迹向上,既保证了方向、又保证了位置,进入的条件是在航向自动的基础上,增加位置信息来源,对于民船来说,位置信息多是来自于GPS或北斗等卫星导航系统。航迹控制是船舶按照电子海图制定的预先航行路径,自动完成的操舵方式,进入条件是在迹向条件的基础上,自动操舵仪必须具有一条有效的航迹规划路线。
基于以上的控制要求,制定的语音控制策略必须完全保证安全,且经过反复确认,防止误操作,因此,设计的控制策略是以下两种模式。
3.1 正常模式
切入“简单”操舵方式:“简单”语音识别→ “简单操纵模式”播报2次→ “当前操作模式”播报2次 → “条件具备,请确认操舵模式切换为‘简单’”→ 语音识别“确定”→ 完成切换。
切入“随动”操舵方式:“随动”语音识别→ “随动操纵模式”播报2次→ “当前操作模式”播报2次→“条件具备,请确认操舵模式切换为‘随动’→ 语音识别“确定”→ 完成切换。
切入“随动”操舵方式:“随动”语音识别→ “随动操纵模式”播报2次→ “当前操作模式”播报2次→“条件具备,请确认操舵模式切换为“随动””→ 语音识别“确定”→ 完成切换。
切入“航向自动”操舵方式:“航向自动”语音识别→ “航向自动操纵模式”播报2次→ “当前操作模式”播报2次→ “条件具备,请确认操舵模式切换为‘航向自动’”→ 语音识别“确定”→ 完成切换。
切入“迹向”操舵方式:“迹向”语音识别→ “迹向操纵模式”播报2次→ “当前操作模式”播报2次→“条件具备,请确认操舵模式切换为‘迹向自动’”→ 语音识别“确定”→完成切换。
切入“航迹”操舵方式:“航迹”语音识别→ “航迹操纵模式”播报2次→ “当前操作模式”播报2次→“条件具备,请确认操舵模式切换为‘航迹自动’”→ 语音识别“确定”→完成切换。
3.2 非正常模式
非正常模式是指自动舵信号源或本体出现故障的操舵方式选择,包括人工干预操舵模式选择和自动舵自动降功能使用。例如船舶处于航迹操舵模式,因卫星导航信息缺失,自动操舵仪降功能为航向控制模式:
“GPS信号缺失”播报2次→“航迹操舵模式失效”播报2次→ 切入“航向自动操舵模式” 播报2次。
3.3 航行状态参数播报
船舶航行过程中有很多重要的状态参数需要驾驶人员实时把控,对航行安全有着重要的意义,对应不同的操舵模式,参数的选择不同。

表1 航行状态参数表
4 软件设计
软件采用KEIL进行编制,因为keil软件中自带有RL-RTX实时操作系统、RL-FlashFS文件系统、RL-TCPnet以太网通信协议栈、RL-CAN通信协议栈,为语音交互器提供了很好的软件支撑。根据自动操舵仪语音交互器的功能,软件由硬件初始化模块、系统启动任务、语音识别任务、语音播报任务、以太网通信任务、双CAN通信任务、文件系统管理任务组成。硬件初始化模块主要是对STM32F407VGT6的硬件外设进行配置,方便后续的软件驱动调用。系统启动任务主要是初始化、并启动RTX实时操作系统内核。语音识别任务是根据XFS5152CE核心电路识别的语音代码进行控制策略分析。语音播报任务是根据控制策略分析的结论,调取文件系统,组织播报代码。以太网通信任务和双CAN通信任务是满足自动操舵仪内部接口需要,进行控制指令的传输。其控制流程如图5所示:

图5 软件流程图
5 结 语
船舶自动操舵仪语音交互器是软硬件结合的一种嵌入式系统,打通了人类语音和船舶操纵控制的信道,开拓了新的船舶控制方式,极大地节约了人力物力,增强了船舶操纵的安全性和舒适性,具有较大的经济价值和应用前景。
猜你喜欢
北京航空航天大学学报(2022年7期)2022-08-06
舰船科学技术(2022年11期)2022-07-15
舰船科学技术(2022年10期)2022-06-17
新世纪智能(高一语文)(2021年3期)2021-07-16
雷达科学与技术(2020年4期)2020-09-11
民用飞机设计与研究(2019年4期)2019-05-21
北京航空航天大学学报(2017年2期)2017-11-24
通信产业报(2017年6期)2017-03-27
通信产业报(2017年3期)2017-03-24
山东工业技术(2016年15期)2016-12-01