基于Lyapunov 直接法的虚拟同步发电机并网暂态稳定性分析
2019-11-08 02:51雷为民程雪坤巨云涛
浙江电力 2019年10期
高 振,雷为民,赵 峰,刘 辉,程雪坤,巨云涛
(1.中国农业大学信息与电气工程学院,北京 100083;2.国网冀北电力有限公司,北京 100053;3.国网冀北电力科学研究院(华北电力科学研究院有限责任公司),北京 100045;4.国家电网公司风光储并网运行技术实验室,北京 100045)
0 引言
风力、光伏等新能源在我国发展迅猛,据全球风能理事会发布的《全球风电报2017》数据显示,截止2017 年底,中国新增风电装机容量为19.66 GW,排名全球第一。我国已经成为世界新能源技术发展最快、规模最大的国家。与此同时,我国将对深远海发电技术进行深入研究,深远海发电将会是100%的新能源发电。
然而,新能源并网也会带来一些问题,高比例接入后会使得电网调节能力下降和增大系统运行风险。在此背景下,VSG(虚拟同步发电机)技术应运而生。VSG 技术通过在新能源机组变流器控制环节中模拟同步机的运行机制,使新能源发电设备具备主动支撑电网的能力[1-2]。但是,VSG 并网运行后,因其具有电流限幅、阻尼大等特性,对电力系统的稳定性产生的影响较复杂。并且,随着新能源的渗透率越来越高,对VSG 并网稳定性的深入研究意义重大。
VSG 模型主要包括两大部分,一部分是主电路;另一部分是控制系统[3-5]。主电路模型为常规的并网逆变器拓扑;控制系统主要包括VSG 的主体模型和控制方式,是VSG 的核心。目前,VSG主体模型以模拟同步发电机经典的二阶模型为主。对于控制方式的研究,主要集中两个方向,一是有功-频率控制;二是无功-电压控制。
有功-频率控制是目前大多数VSG 技术采用的控制方式,文献[6]在有功-频率下垂表达式中,加入了无功功率项,同时,引入了有功功率和无功功率的微分项,这样既保证了系统的稳态特性,又改善了系统的动态特性,进而增强了并联运行VSG 的功率分配能力和环流抑制能力。文献[7]进一步提出在微电网孤岛运行时,将VSG 分为2 类,一类是非调频发电单元,按照功率调度指令发电并且参与一次调频,能够缓解系统频率在扰动情况下的波动;另一类是调频发电单元,利用二次调频来实现频率的无差控制,同时为微电网提供参考电压。在频率稳定性方面,文献[8-9]提出平抑VSG 功率振荡的方法,其主要原理是将VSG 有功功率传输方程线性化,从而引入线性控制理论,同时将阻尼因子和转角偏差解耦,进而抑制有功功率的振荡,保证频率稳定。
无功-电压控制是为了模拟同步发电机的励磁调节功能,用以调节VSG 输出电压幅值的大小。目前,多采用无功功率与电压幅值下垂控制的方法。文献[10-11]提出一些改进后的下垂控制方法,改进后的下垂控制方法同样适用于VSG的无功-电压控制,并且能够获得更好的控制效果。文献[12]提出通过指令修正的方法来控制VSG输出电压恒定不变。在VSG 无功-电压控制中,有时会出现无功功率波动现象,其主要原因是由于欠阻尼特性过于明显。针对该现象,文献[13]提出一种VSG 非线性阻尼控制器,可有效抑制系统的低频振荡以及维持VSG 电压稳定。
然而,由于虚拟同步发电机与传统的同步发电机并不完全相同,也需要对虚拟同步发电机接入电网后的稳定性问题进行研究。文献[14]对虚拟同步发电机技术已有的技术方案进行了简要的总结和对比,指出了VSG 并网可能会产生的稳定性问题。
分析电力系统暂态稳定的方法主要有时域仿真法和直接法,也有一些其他的方法例如混合法、扩展等面积法等,但其都是在前2 种方法的基础上引申出来的。
目前,针对虚拟同步发电机并网后系统的暂态稳定性研究较少。文献[15]指出,在每个振荡环节中通过选择适当的转动惯量值来控制加速和减速过程,并更进一步提出了负惯性的概念,其在改善系统频率稳定方面效果显著。文献[9]利用李雅普诺夫能量函数法验证了文献[15]所提方法的可行性,为该方法提供了理论支撑。文献[16]建立了电压型虚拟同步发电机模型和电流型虚拟同步发电机模型,对虚拟同步发电机的参数以及位置进行了优化,同时对比了2 种虚拟同步发电机模型及低惯量模型暂态稳定性。文献[17]针对包含虚拟同步发电机的多机系统提出了一种基于PSO(粒子群算法)的虚拟同步发电机控制参数优化方法。文献[18-20]分析了计及电流限幅特性对虚拟功角曲线的影响,进而分析了电流限幅特性对逆变器的暂态稳定性的影响。研究结果表明,VSG并网后,系统在遭受到大扰动时会出现暂态失稳现象。因此,分析VSG 并网后系统的暂态稳定性具有一定研究价值。
本文搭建的VSG 模型,计及虚拟阻抗、电流限幅环节以及电流内环控制,比只考虑有功控制和无功控制的传统VSG 模型更加准确。同时,本文采用直接法对接有VSG 的单机无穷大系统进行暂态稳定分析,并通过时域仿真的结果验证其准确性。利用直接法对接有VSG 的四机两区域系统的暂态稳定性进行分析。
1 虚拟同步发电机的数学模型
本文搭建的连接到三相网络的VSG 模型如图1 所示,包括PWM(脉冲宽度调制)环节将功率从直流侧传输到交流侧,RLC 滤波环节来减小电压和电流的波动。VSG 控制方式大致可分为五部分,有功控制环节、电压控制环节、虚拟阻抗控制环节、电流限幅环节以及电流内环控制环节。有功控制用来模仿传统同步发电机的机械转子运动,电压控制用来调节VSG 的输出电压幅值,虚拟阻抗控制环节用来跟踪VSG 的电压参考指令,电流限幅环节对电流进行幅值限制,电流内环控制环节可以增加VSG 控制系统的动态响应速度。

图1 VSG 主体控制框图
整个系统的状态方程是在三相电网的公共参考系上表示的。为了计算和分析方便,进行派克变换,如图2 所示。派克变换所需要的δ 是VSG相对于公共参考系的转换角度,定义为功角:

式中:ω 为VSG 的虚拟转速。

图2 坐标变换示意
VSG 有功控制的框图如图3 所示,其转动方程为:

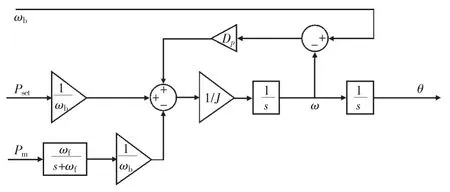
图3 VSG 有功控制框图
式中:J为虚拟惯量;Dp为阻尼系数;ωb为参考转速,可由式ωb=2πfn算出;Tset为人为设定转矩,由Tset=Pset/ωb计算得到;Tm为输出转矩,由式(3)计算得到:

式中:,s为微分算子,,即有功功率先经过一个低通滤波器环节。
VSG 电压控制框图如图4 所示,其方程为:

式中:Vd为VSG 输出电压的d轴分量;Vm为电压参考值;kpvac,kivac分别为比例环节和积分环节的系数。
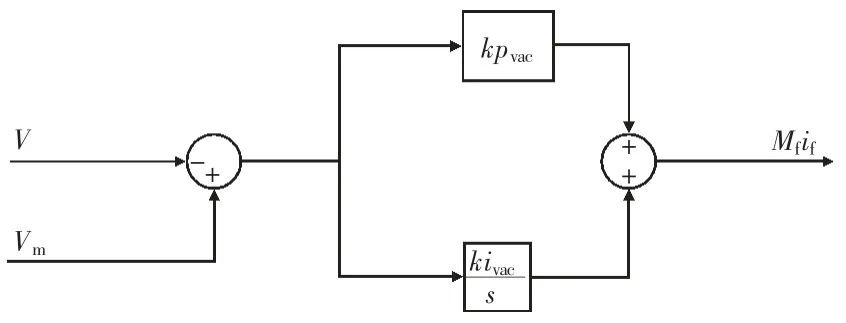
图4 VSG 电压控制框图
根据文献[5]提出的同步逆变器的电磁模型,本文做出一些简化,表示为:

式中:e为输入到虚拟阻抗控制中的电压三相参考值。
利用式(5)得到的电压三相参考值与VSG 有功控制输出的角度,进行d-p变换,计算出参考电压值的d-q分量,即Vdq0ref,输入到虚拟阻抗控制中。
虚拟阻抗控制框图如图5 所示,其公式为:

式中:Vd,Vq为VSG 输出电压的d-q分量;Vdref,Vqref为由有功控制与电压控制得到的参考电压的d-q分量;Id,Iq为VSG 输出电流的d-q分量;为经滤波后参考电流的d-q分量;kpv,kiv分别表示比例和积分环节的系数;n和kffi表示比例系数;C为电容值。

图5 VSG 虚拟阻抗控制框图
电流限幅环节采用d轴电流优先限幅的方式,其公式为:

式中:Idmax为d轴电流最大值;为经过限幅环节后参考电流的d-q分量。
电流内环控制框图如图6 所示,其公式为:


式中:为VSG 控制输出参考电压的d-q分量;Ids,Iqs为经过滤波后电流的d-q分量;kpi,kii分别表示比例和积分环节的系数;n和kffv表示比例系数;L为电感值。
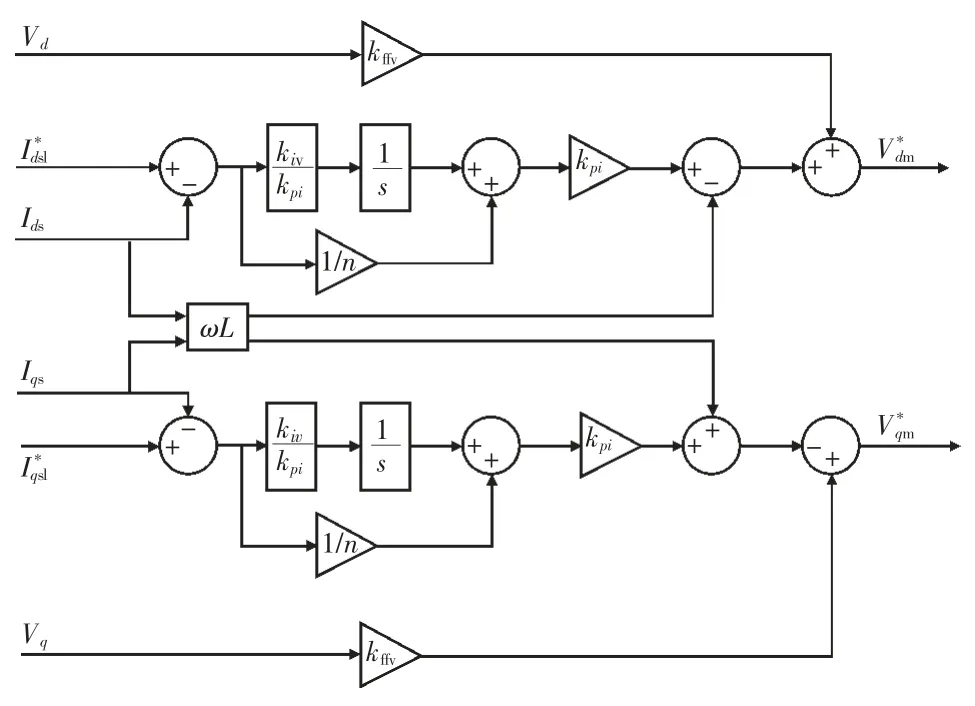
图6 VSG 电流内环控制框图
VSG 无功功率的约束方程为:

2 能量函数的建立
在建立系统暂态能量函数之前,先结合等面积法则对系统暂态稳定性进行简要分析。
图7 为分析接入VSG 单机无穷大系统暂态失稳机理的虚拟功角曲线图。由图7 可知,当人为设定功率为P0时,虚拟同步机稳定运行于图7中的A 点。当系统遭受三相故障扰动时,外界电压由于故障而跌落(假设<P0),虚拟同步机电流发生饱和,其运行点将从非饱和虚拟功角曲线上的A点切换到故障下饱和虚拟功角曲线上的点,虚拟同步机将沿着故障曲线运动,此时系统功率不平衡,根据式(2)可知,虚拟同步机的虚拟转速增大,虚拟功角不断增大,图7 中的灰色面积表示加速面积。
若当虚拟同步机运动到时故障切除,则其运行点将切换到故障切除后饱和虚拟功角曲线上的E点,此时由于虚拟同步机的动能仍大于0,其虚拟功角将继续增大并进入减速区域,图7 中黑色面积表示减速面积。

图7 虚拟同步发电机的虚拟功角曲线
若运动到D点时虚拟同步机的动能未减少到0,即加速面积大于减速面积,虚拟同步机将入不稳定区域进而发生虚拟功角暂态失稳;若在运动到D点前可以减速到0,则之后虚拟同步机将沿着蓝色曲线减速到O点,并退出电流饱和,再进一步运动到原来的稳定平衡点A。
由上述分析可知,虚拟同步机在暂态过程中必须有足够大的减速区域以使其减速,使之稳定到原来的平衡点A。
2.1 接有VSG 的单机无穷大系统
图8 为接有VSG 的单机无穷大系统的示意图,故障为2 条线路的其中1 条线路发生三相接地短路。
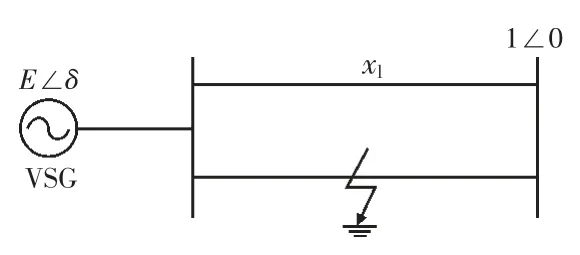
图8 单机无穷大系统
本文使用的VSG 模型计及电流限幅、大阻尼等特性,同时其为二阶模型,所以采用首次积分法构造系统的暂态能量函数。首次积分法需要满足的条件是:
当不计及阻尼时,系统偏保守,文献[19]详细介绍了其暂态能量函数的构建过程。然而,VSG的阻尼较大,不能省略,因此当计及阻尼时,阻尼项就合并到暂态能量函数中[20],得到单机无穷大系统的暂态能量函数:

式中:X∑为故障切除后系统的视在电抗;0≤λ≤1;第一项表示VSG 虚拟转子动能;第二项表示磁性势能和耗散势能;第三项表示位置势能;第四项和第五项表示虚拟阻尼消耗的能量。
临界能量Vcr定义为系统处于不稳定平衡点时以稳定平衡点δs点为参考点,系统所具有的势能。根据定义以及式(14),有:
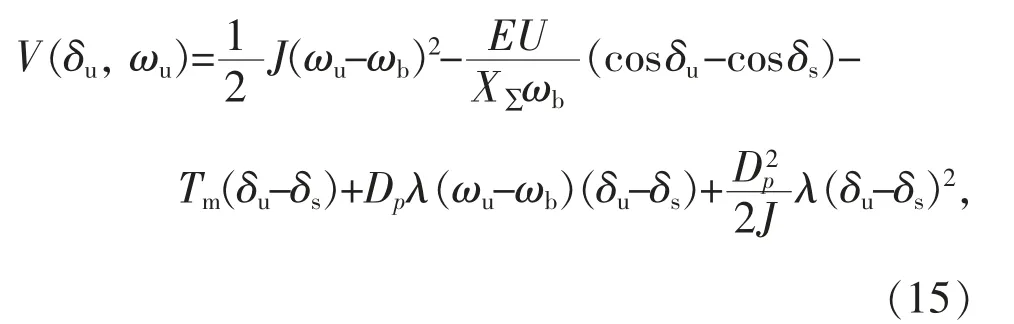
式中:ωu为故障切除后系统不稳定平衡点处VSG的虚拟转速;δu为故障切除后系统不稳定平衡点处的功角值。
由此,可得出直接法分析接入VSG 单机无穷大系统暂态稳定性的一般步骤:
(1)故障未发生,即稳态时,进行潮流计算,求出系统在稳态时各物理量的值。
(2)故障切除时,求出系统此时的(δc,ωc)。
(3)在故障切除后,分别求出系统的稳定平衡点处的(δs,ωs)以及不稳定平衡点的(δu,ωu)。
(4)将求得的(δc,ωc)和(δs,ωs)带入到式(14),求出系统在故障切除时的系统总能量Vc。
(5)将求得的(δu,ωu)和(δs,ωs)带入到式(15),求出系统的临界总能量Vcr。
(6)进行暂态稳定判定,依据如下:当Vc<Vcr,则系统稳定;反之,则系统不稳定;Vc=Vcr时,系统为临界状态。
(7)根据步骤(1)得到的系统故障前的各物理量的值,以此为故障时系统的初值,对故障后系统的运动方程在时间上进行积分,计算每个步长的系统的Vc,直到Vc=Vcr,此时的时间即为临界切除时间。
2.2 接有VSG 的多机系统
多机系统的能量函数建立与单机无穷大系统的能量函数建立过程相似,接入的VSG 依然是二阶模型,所以同样采用首次积分法构造多机系统的暂态能量函数。但是由于多机系统含有多个发电机,且拓扑结构更加复杂,其系统方程的表示更加复杂,暂态能量函数的复杂程度也增加很多。多机能量函数确立的步骤为:
(1)消去网络所有的中间节点和负荷节点以及发电机的机端节点,得到只剩下发电机内节点的降阶节点导纳矩阵。
(2)在系统COI(惯量中心)坐标下书写多机系统的转子运动方程。
(3)在多机系统转子运动方程的基础上,确定多机系统的暂态能量函数。
(4)重复分析单机无穷大系统暂态稳定时的步骤(1)到步骤(7)。
于是得到多机系统的暂态能量函数:
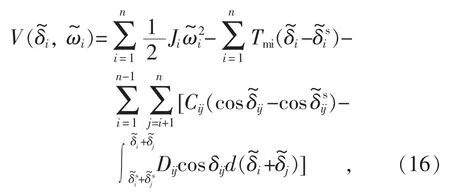
式中:;Dpi为每个发电机的阻尼系数,EiEjBij=Cij,EiEjGij=Dij;表示系统在COI 坐标下的各发电机包括VSG 的功角以及转速。
式(16)中右侧第一项为多机系统中发电机包括VSG 的转子动能;第二项为位置势能以及阻尼所消耗的能量;第三项为磁性势能;第四项为耗散势能。
对于多机系统临界能量计算,求取方法与单机无穷大系统相同,同样认为系统不稳定平衡点(δu)处的势能是临界能量的近似值。计算方法是,把式(12)表达式中的换成,取Vcr≈即可。
3 算例分析
对如图8 所示的接有VSG 的单机无穷大系统采用直接法进行暂态稳定分析。结合时域仿真的结果以及暂态能量函数的表达式,求出系统故障切除时总能量Vc以及临界能量Vcr,并用时域仿真的结果验证直接法的准确性。
当故障切除时间为0.4 s 时,时域仿真的结果显示系统稳定,并且得到故障切除时有(δc,ωc)=(1.7,5.919 3),故障切除后系统的稳定平衡点处(δs,ωs)=(0.461,1)以及故障切除后系统的不稳定平衡点处(δu,ωu)=(2.68,1),根据直接法分析接入VSG 单机无穷大系统暂态稳定性步骤(4)得出故障切除时系统的总能量为0.822 p.u.,根据单机无穷大系统暂态稳定时的步骤(5)求出系统的临界能量为0.844 p.u.,0.844>0.822,所以系统稳定,与时域仿真结果相同。并且,求出故障切除时间为0.41 s 时,系统的总能量约为0.844 p.u.,与临界能量相同,即临界切除时间为0.41 s,与时域仿真得出的临界切除时间相同,验证了直接法对系统分析暂态稳定性得准确性。
接着,对接入VSG 的四机两区域系统通过直接法进行暂态稳定性分析。VSG 接在送端时,系统接线图如图9 所示。

图9 VSG 接在送端的四机两区域示意
在1 s 时,系统的7 节点与8 节点的一条线路上发生三相接地短路,故障持续0.1 s。
观测4 个同步电机以及VSG 的端电压。由图10 可知,系统较为稳定。根据时域仿真的结果,带入到多机暂态能量函数表达式中,求出系统的临界能量为1.822 1 p.u.。
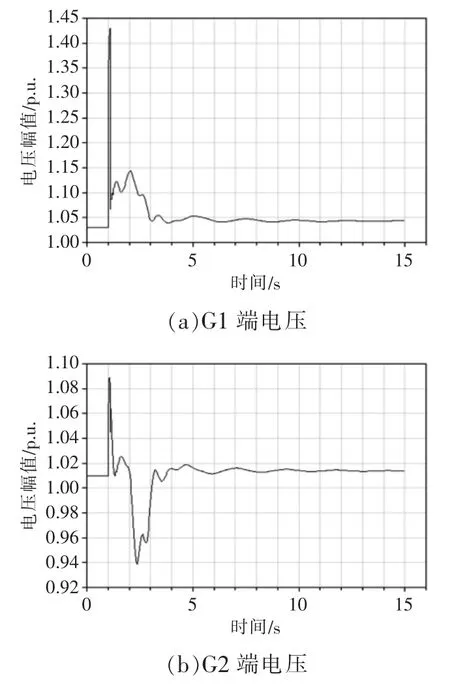
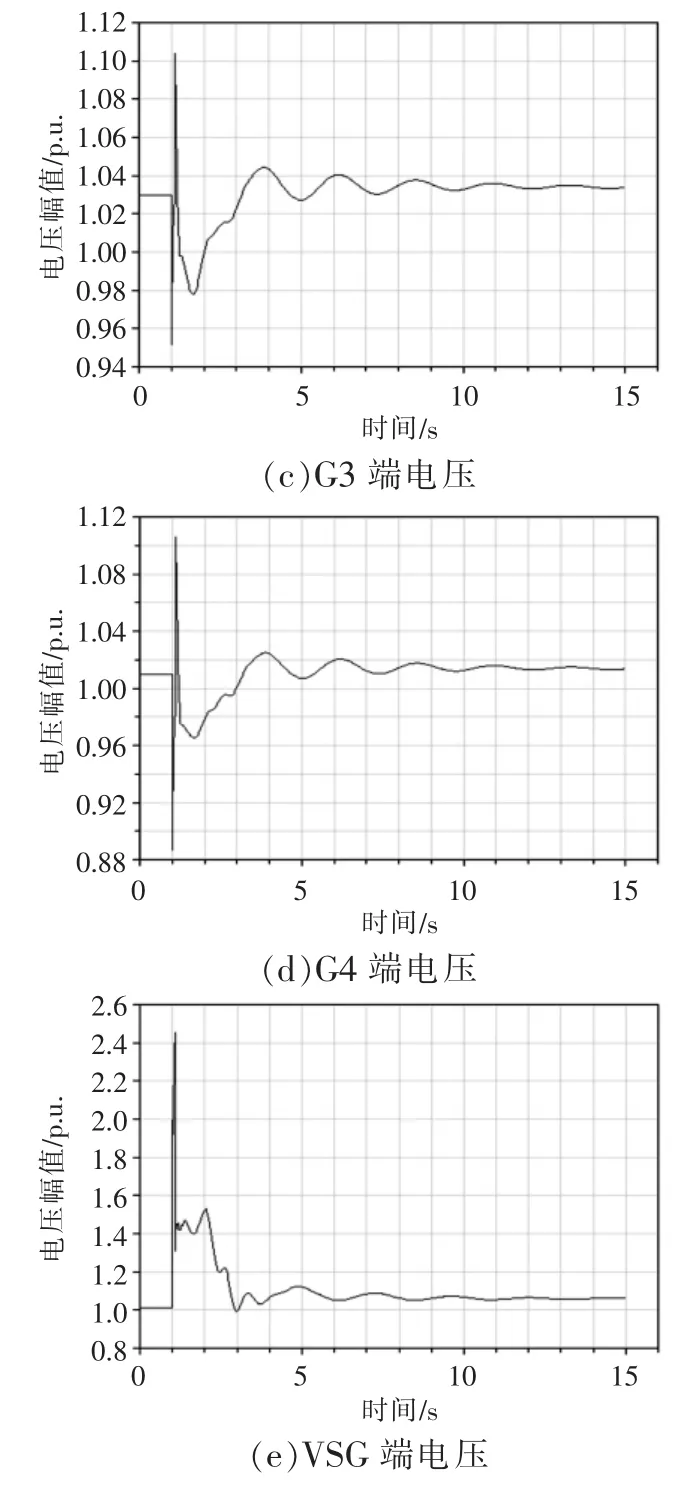
图10 VSG 接在送端的各发电机端电压波形
VSG 接在受端时,系统接线如图11 所示。同样,在1 s 时,系统的7 节点与8 节点的一条线路上发生三相接地短路,故障持续0.1 s。
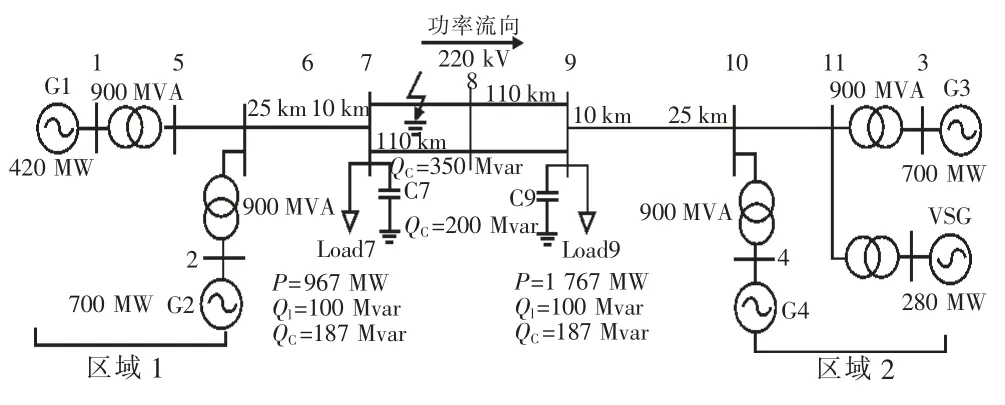
图11 VSG 接在受端的四机两区域
依然观测4 个同步电机以及VSG 的端电压。由图12 可知,系统出现振荡现象。根据时域仿真的结果,带入到多机暂态能量函数表达式中,求出系统的临界能量为0.209 4 p.u.,小于1.822 1 p.u.。
因此,可以得出VSG 接在送端,系统稳定性较高;而接在受端,系统的稳定性较低。
图12 VSG 接在受端的各发电机端电压波形
在VSG 接在送端的情况下,增加VSG 的占比,由原来的280 MW 增加到420 MW,观测4个发电机及VSG 的端电压,研究VSG 的占比对系统暂态稳定性的影响。
将2 种不同VSG 占比情况进行对比,实线表示VSG 占比为280 MW,虚线表示VSG 占比为420 MW。由图13 可知,增加VSG 的出力,发生扰动之后,各发电机包括VSG 的端电压的第一摆幅度都变大,系统更容易失稳。根据暂态能量函数表达式,求出此时系统的临界能量为1.023 0 p.u.,小于1.822 1 p.u.,验证了时域仿真结果的正确性。

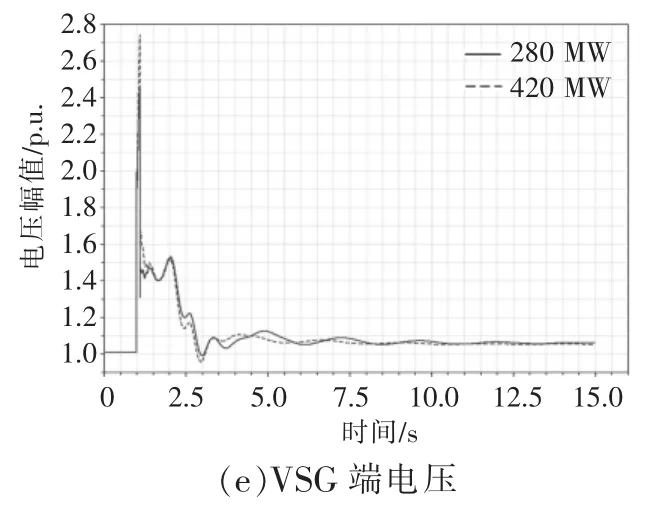
图13 VSG 接在送端不同占比各发电机端电压波形对比
4 结语
本文在已有的VSG 模型的基础上,添加虚拟阻抗环节、电流限幅环节以及电流内环控制环节,搭建的VSG 模型准确性更高。同时,本文计及VSG 电流限幅、大阻尼等特性,采用Lyapunov直接法对接入VSG 的单机无穷大系统以及四机两区域系统进行了暂态稳定分析。首先,应用时域仿真结果验证了直接法分析单机无穷大系统暂态稳定的正确性;其次,使用直接法对VSG 接入四机两区域系统送端与受端不同情况进行暂态稳定分析,得出VSG 接在受端比接在送端更容易使得系统失稳;最后,对于VSG 接在送端的情况,增加VSG 的占比,发现增加VSG 的占比会使得系统更容易失稳。
猜你喜欢
电气电子教学学报(2022年2期)2022-05-23
故事作文·高年级(2021年12期)2021-12-21
湖南电力(2021年4期)2021-11-05
新疆钢铁(2021年1期)2021-10-14
军民两用技术与产品(2021年4期)2021-07-28
能源工程(2021年2期)2021-07-21
电子制作(2019年7期)2019-04-25
航天工业管理(2019年11期)2019-04-20
电子制作(2018年14期)2018-08-21
军事文摘·科学少年(2016年8期)2016-11-02