
基于AIS数据和LSTM网络的船舶航行动态预测
2019-11-06 02:15任宇翔赵建森刘卫王胜正韦雨含
上海海事大学学报 2019年3期
任宇翔 赵建森 刘卫 王胜正 韦雨含

摘要:为进一步提高船舶航行动态预测的精度,提出将长短期记忆(long short-term memory,LSTM)网络应用到船舶航行动态预测。
将船舶自动识别系统(automatic identification system,AIS)数据转化为航行动态时间序列数据用于LSTM网络的训练和测试。将预测结果与传统的航迹推算法、BP(back propagation)神经网络法等的预测结果进行对比,结果证明:基于LSTM网络的船舶航行动态预测模型具有精度高、鲁棒性强、通用性好等特点。预测结果可以为船舶交通管理中心(vessel traffic services,VTS)的监管提供参考,在预警船舶碰撞、搁浅等事故方面具有较高的实际应用价值。
关键词:船舶; 航行动态预测; 船舶自动识别系统(AIS); 长短期记忆网络(LSTM); BP神经网络
中图分类号: U675.79
文献标志码: A
Abstract: In order to further improve the accuracy of ship navigation behavior prediction, the long short-term memory (LSTM) network is applied to the ship navigation behavior prediction. The ship automatic identification system (AIS) data is transformed into navigation behavior time series data for training and testing of LSTM network. The prediction results of LSTM network are compared with those of the traditional track estimation method and BP (back propagation) neural network method. The results show that the ship navigation behavior prediction model based on LSTM network is of high accuracy, strong robustness and good generality. The prediction results can provide reference for the supervision of vessel traffic services (VTS), and have high practical application value in early warning of ship collision, stranding and other accidents.
0 引 言
实时准确地获取船舶航行动态信息对于海上交通研究与管理、船舶智能避碰有重要的作用。对于船舶交通管理中心(vessel traffic services,VTS)的监管而言,准确的船舶航行动态信息更是协调航道内的通航船舶、管理通航水道必不可少的支持,对水域通航状况的监管以及碰撞、搁浅、触礁等事故的预警有着重要的意义;对于船舶避碰而言,预测来船在未来时刻的位置、航向、航速等动态信息,以此計算船舶碰撞危险的程度、评估避让方案的优劣,相应地修正避让行动的幅度和避让方向,可达到更好的避让效果。
徐婷婷等[1]采用BP(back propagation)神经网络预测船舶航迹,以航速和航向作为BP神经网络的输入,以经度差、纬度差作为输出,得到的船舶经纬度的误差很小,预测出的船舶航迹较准确,但是未预测船舶的动态特征如航向、航速等;徐铁等[2]采用卡尔曼滤波算法对船舶自动识别系统(automatic identification system,AIS)数据进行修正,利用AIS节点数据做最小二乘估计,并对航迹进行平滑和预测处理,得到了比较接近真实情况的船舶航迹,提高了船位预测的精确度;甄荣等[3]进一步扩展了文献[1]的研究内容,建立了基于BP神经网络的船舶航行动态预测模型,在已有的航迹预测的基础上增加了航向和航速的预测,以此实现多维的船舶航行动态特征预测,并利用岸基AIS数据进行验证,初步取得了较好的预测结果。
相比于船舶,空间飞行器航迹预测的方法种类更多、更成熟,除BP神经网络、卡尔曼滤波等算法之外,还有利用聚类方法、函数型回归方法、径向基神经网络、随机森林等机器学习方法的航迹预测方法。这对于船舶的航行动态预测也是一种启发:利用机器学习算法来进行船舶动态预测。长短期记忆(long short-term memory,LSTM)网络属于机器学习中的循环神经网络(recurrent neural network,RNN)的一种[4],在时间序列数据预测方面展示出了巨大的潜力。
目前国内外交通领域对LSTM网络模型的应用场景较为有限:王国栋[5]利用LSTM网络进行了包含船舶纵倾、横摇等的船舶姿态预测,预测结果较准确;范光鹏等[6]将LSTM网络与卡尔曼滤波相结合建立了公交车到站时间预测模型,该模型的预测精度比支持向量机(support vector machine, SVM)模型的更高;曹博等[7]和陈韫[8]利用LSTM网络进行了短时交通流的预测,使得交通规划更加精准;顾兴健等[9]利用LSTM网络进行了局部海域水文气象环境预测。SALMAN等[10]利用LSTM网络进行了航行天气变化预测,有效预测了未来时刻天气的变化;WEN等[11]利用LSTM网络进行了空气污染预测,预测结果与真实污染数据十分接近。上述研究主要集中在船舶姿态、交通流、气象变化、环境污染等领域,尚未有学者将LSTM网络应用到船舶航行动态预测领域,因此本文提出将LSTM网络应用到船舶航行动态预测中,以期达到更好的预测结果。
本文根据原始的船舶AIS数据的特点,从中提取时间、位置(经度、纬度)、航向、航速等要素构建船舶航行动态时间序列数据,分析基于LSTM网络的船舶航行动态预测模型的实现过程。利用船舶航行动态时间序列数据对LSTM网络预测模型进行训练、测试验证,把相同的数据用于传统航迹推算、BP神经网络预测模型的仿真实验,并将实验结果进行对比、分析和总结。
1 基于AIS的船舶航行动态模型
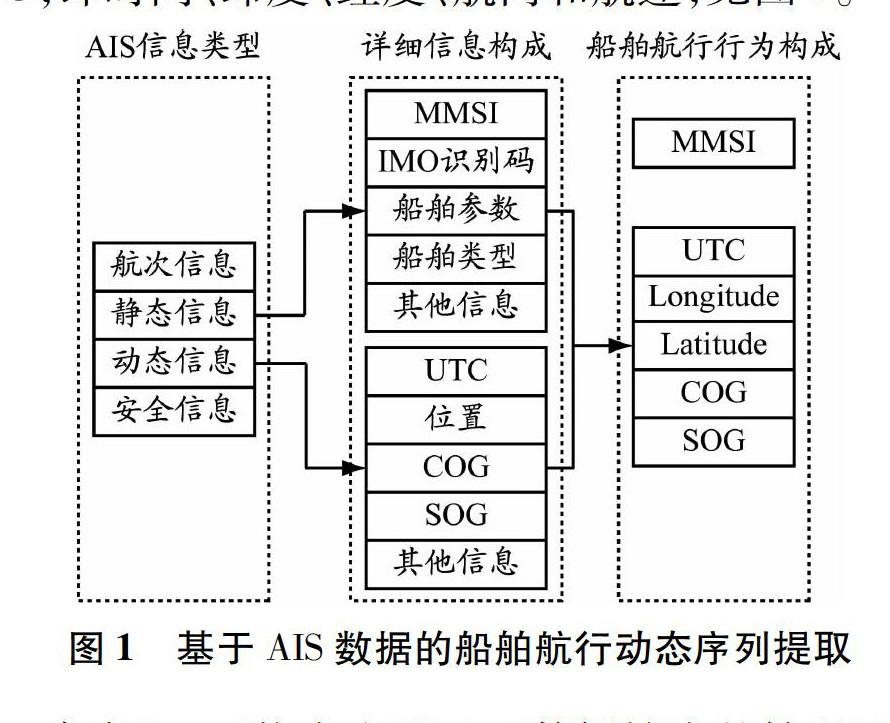
AIS是现代船舶导航系统的重要组成设备。AIS信息主要包含两类数据,分别为:船舶静态数据,如船名、呼号、水上移动通信业务标识码(maritime mobile service identity, MMSI)、国际海事组织(International Maritime Organization, IMO)识别码、船舶类型、船长、船宽等;船舶动态数据,如位置、航向、航速等[12]。
船舶航行动态是指定船舶实时运动信息的数据表现形式。采用MMSI作为船舶的标识码,以MMSI对应的动态信息作为船舶航行动态序列S的5个组成字段,分别为UTC、Latitude、Longitude、COG和SOG,即时间、纬度、经度、航向和航速,见图1。
设缺失的数据为(ti,Sti),其中ti代表缺失数据的时刻,Sti代表该时刻对应的数据;ti前一时刻tk和后一时刻tm的数据已知,分别为(tk,Stk)和(tm,Stm)。
根据式(1)对连续的AIS数据进行处理,可以得到指定的MMSI对应的船舶航行动态记录,这就是AIS时间序列数据。表1为截取的经过处理的某船航行动态时间序列数据的一部分,该船的MMSI为413555880,日期为2018年2月11日,相邻数据时间间隔为10 s。表1中有灰色底纹的数据为采用线性插值法填补的数据。
4 结束语
根据实际船舶航行动态数据的特点,从真实船舶AIS数据中提取构建船舶航行动态时间序列,进行LSTM网络的训练与验证,将预测值与真实值进行对比,分析验证了LSTM网络可以对船舶航行动态做出有效、准确的预测,同时避免了建立复杂的船舶运动模型,为船舶航行动态预测提供了新的思路。将预测结果与传统的航迹推算法、BP神经网络预测的结果进行对比分析后得出:LSTM网络有误差小、精度高、鲁棒性强、通用性高等优点,可以应用到实际工作中。在接下来的工作中,需要结合可能的应用场景,如VTS监管与避碰、搁浅预警等,对LSTM网络进行进一步的调整、优化,以期得到更好的预测结果与应用。
参考文献:
[1]徐婷婷, 柳晓鸣, 杨鑫. 基于BP神经网络的船舶航迹实时预测[J]. 大连海事大学学报, 2012, 38(1): 9-11.
[2]徐铁, 蔡奉君, 胡勤友, 等. 基于卡尔曼滤波算法船舶AIS轨迹估计研究[J]. 现代电子技术, 2014, 37(5): 97-100.
[3]甄荣, 金永兴, 胡勤友, 等. 基于AIS信息和BP神经网络的船舶航行行为预测[J]. 中国航海, 2017, 40(2): 6-10.
[4]周少龙, 周锋. 基于时间序列的港口货物吞吐量GRNN预测模型[J]. 上海海事大学学报, 2011, 32(1): 70-73.
[5]王国栋. 基于LSTM的舰船运动姿态短期预测及仿真研究[D]. 镇江: 江苏科技大学, 2017.
[6]范光鹏, 孙仁诚, 邵峰晶. 基于LSTM和Kalman滤波的公交车到站时间预测[J]. 计算机应用与软件, 2018, 35(4):91-96.
[7]曹博, 高茂庭. 基于LSTM的短时交通流预测研究[J]. 现代计算机(专业版), 2018(25): 3-7. DOI: 10.3969/j.issn.1007-1423.2018.25.001.
[8]陈韫. 基于LSTM深度网络的城市道路短时交通状态预测模型研究[D]. 福州: 福建工程学院, 2018.
[9]顾兴健, 赵璐, 金明, 等. 基于LSTM神经网络的我国典型试航海域环境短期预报方法研究[J]. 中国造船, 2017, 58(4): 100-107.
[10]SALMAN A G, HERYADI Y, ABDURAHMAN E, et al. Single layer & multi-layer long short-term memory (LSTM) model with intermediate variables for weather forecasting[J]. Procedia Computer Science, 2018, 135: 89-98.
[11]WEN Congcong, LIU Shufu, YAO Xiaojing, et al. A novel spatiotemporal convolutional long short-term neural network for air pollution prediction[J]. Science of the Total Environment, 2019, 654: 1091-1099.
[12]黃健伟, 陆悦铭, 李义斌. AIS时代VTS面临的新课题[J]. 上海海事大学学报, 2007, 28(3): 19-23, 32.
[13]罗永豪. 基于AIS数据的船舶航行轨迹预测[D]. 广州: 华南理工大学, 2017.
[14]LI Yifei, CAO Han. Prediction for tourism flow based on LSTM neural network[J]. Procedia Computer Science, 2018, 129: 277-283. DOI: 10.1016/j.procs.2018.03.076.
[15]ZHANG Jianfeng, ZHU Yan, ZHANG Xiaoping, et al. Developing a long short-term memory (LSTM) based model for predicting water table depth in agricultural areas[J]. Journal of Hydrology, 2018, 561: 918-929. DOI: 10.1016/j.jhydrol.2018.04.065.
[16]YUAN Yuan, ZHAO Yang, WANG Qi. Action recognition using spatial-optical data organization and sequential learning framework[J]. Neurocomputing, 2018, 315: 221-233. DOI: 10.1016/j.neucom.2018.06.071.
[17]王国栋, 韩斌, 孙文赟. 基于LSTM的舰船运动姿态短期预测[J]. 舰船科学技术, 2017, 39(7): 69-72. DOI: 10.3404/j.issn.1672-7649.2017.07.014.
[18]HUANG Xiuling, SUN Jie, SUN Jian. A car-following model considering asymmetric driving behavior based on long short-term memory neural networks[J]. Transportation Research Part C: Emerging Technologies, 2018, 95: 346-362. DOI: 10.1016/j.trc.2018.07.022.
[19]潘琪祥. 关于风流中航迹推算方法的探讨[J]. 中国航海, 1998(1): 8-11.
(编辑 贾裙平)
猜你喜欢
装备维修技术(2022年7期)2022-07-01
科学与财富(2021年35期)2021-05-10
智富时代(2019年3期)2019-04-30
智富时代(2019年3期)2019-04-30
伙伴(2018年1期)2018-05-14
现代经济信息(2016年27期)2016-12-16
价值工程(2016年30期)2016-11-24
数字技术与应用(2016年9期)2016-11-09
软件导刊(2016年9期)2016-11-07
科技视界(2016年20期)2016-09-29
