
农田信息采集车设计与试验
2019-11-04 09:21姚照胜刘升平邓国强孙成明
农业机械学报 2019年10期
姚照胜 刘 涛 刘升平 邓国强 武 威 孙成明
(1.扬州大学农学院, 扬州 225009; 2.江苏省粮食作物现代产业技术协同创新中心, 扬州 225009; 3.中国农业科学院农业信息化研究所, 北京 100081)
0 引言
获取农田信息是掌握农田环境和作物生长状况的必要手段[1],是利用农田大数据实现精准农业的基础[2]。农田信息化采集指借助于各类传感器、通过各项指标判断环境状况与作物长势,比人工调查更具有标准性和规范性。快速高效获取农田环境与作物长势信息,可为制定科学合理的施肥、喷药、灌溉措施提供依据,达到精准施肥、合理施药、节约灌溉的目的[3]。近年来,利用物联网和大数据技术获取农田信息成为研究热点之一。
物联网(Internet of Things,IoT)从1998年提出至今,经历了突飞猛进的发展[4]。物联网在农业环境监测上的应用主要通过在农田或设施农业中布设各类传感器、摄像头及控制系统,实现对农业环境信息的监测[5]。ARAI等[6]将传感器安装在黄瓜温室中,监测空气湿度、温度、CO2浓度,并提出适宜黄瓜生长的水肥方案,通过物联网进行控制。TRILLES等[7]利用物联网获取环境数据,与气象数据结合,预测葡萄园中真菌病害发生的几率,为农场提前防治病害提供参考。但传统有线农业物联网监测系统建设成本高、资金投入大、建设周期长,其所设传感器一般不可移动,可扩展性低[8],摄像头位置固定,不能移动拍摄,更不能获取作物行间画面。无线传感器网络(Wireless sensor network,WSN)克服了传统有线物联网的缺点,WSN利用各传感器间的通信组成无线传感器网络,拥有免布线、低功耗、可扩展性强的优点[9]。但由于自身无线标准的问题,其存在一定的系统安全威胁[10]。低功耗的特性也难免会出现能量限制问题[11],对环境要求较高。
随着信息技术的高速发展,集成式芯片功能越来越强,体积越来越小,各类功能强大的机器人(车)被应用于农业生产和管理中[12]。这类机器人体积庞大,只能在宽行距作物和草地上行走,无法进入作物行间。农田信息采集机器人要求行走路线遍布整个农田,但通常路线可行动范围狭窄[13]。对于以上问题,本文利用低成本部件,搭建一种可移动式田间信息采集车,以实现作物行间农田信息和图像的采集。
1 总体方案设计
可移动式农田信息采集车系统主要由采集车车体、微控制单元(Microcontroller unit,MCU)系统和控制端组成[14]。为适应田间复杂地况,本研究采用厚度为2 mm的6061高强度铝合金底盘车身,双6轮式履带轮,其中4轮为独立减振系统。车身重心低,行驶稳定,为安装在车上的其他部件和传感器提供了一个稳定的平台。车身、驱动轮和承重轮均为金属铝合金材质,并有表面喷砂氧化处理,可防止生锈,增加智能车的使用寿命。选用STC11F32XE作为主控芯片,车载系统由多个模块组成,包含电源模块、LM2596S稳压模块、L298P电机驱动模块、AR9331无线WiFi模块、KS8A17摄像头模块、5自由度机械臂模块以及传感器模块(包括温湿度传感器、光照强度传感器、风速传感器、CO2浓度传感器、土壤养分传感器、土壤温湿度传感器和RGB色值传感器等)组成,总体设计框架如图1所示。
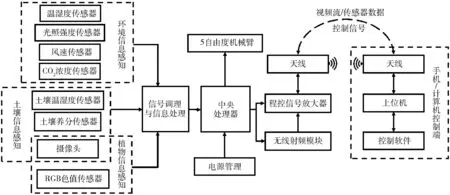
图1 采集车总体设计框架Fig.1 Vehicle overall design framework
2 硬件选型及机械臂设计
2.1 硬件选型
(1)主控芯片选型
车载MCU系统是整个采集车的核心,硬件电路包括电机驱动模块、WiFi模块、机械臂模块、各传感器模块以及电源模块等。为了实现预定功能并节约成本,采用性价比较高的STC11F32XE主控芯片。STC11F32XE是新一代8051单片机,指令代码完全兼容传统8051单片机,但速度是传统8051单片机的8~12倍,工作电压4.1~5.5 V,工作频率0~3 MHz,与8051单片机0~420 MHz的工作频率相当。采用LQFP44G封装,内部包含中央处理器(CPU)、程序储存器(Flash 32 KB)、数据储存器(SRAM 1 280 B)、定时器/计时器、UART串口、丰富的I/O接口等模块。具有高速、低功耗、抗干扰的特征,功能和接口数量满足系统设计的要求。
(2)电机和电机驱动模块
采用XD-37GB520型电机作为动力输出,电机工作电压为12 V,额定功率达10 W,空载转速为50 r/min,负载转速45 r/min,变速箱减速比达1∶100,输出扭力大,能轻松越过障碍,使得小车适应不同地形行驶。
采用L298P双H桥直流电机驱动芯片,为PowerSO20贴片封装,能驱动直流电机和步进电机[15]。虽然芯片过热时具有自动关断功能,但安装散热片能使芯片快速散热,使驱动电路性能更加稳定。
(3)电源及稳压模块
电源使用4 400 mA·h、12 V锂离子电池,最大输出电流可达4 A,并在内部配有过充、过放、短路和过流保护等功能的保护电路。LM2596开关电源调节器是降压型电源管理单片集成电路,能够输出3 A的驱动电流,同时具有很好的线性和负载调节特性,可调节输出小于37 V的各种电压。该器件内部集成频率补偿和固定频率发生器,开关频率为150 kHz,与低频开关调节器相比较,可以使用更小规格的滤波元件。由于该器件只需4个外接器件,所以可使用通用的标准电感。
(4)无线WiFi模块
目前在物联网上应用的无线通信技术主要有ZigBee、WiFi、LTE、蓝牙等,每种方式均有其优缺点[16-17]。具体来说,ZigBee技术拥有低功耗、传输容量大、成本低等优点,但其存在传输距离短的缺点。LTE前身是GPRS和3G技术,LTE普及后,后两者仅保留了基本的通话和少量数据功能,大部分数据流量转到了LTE网络。
LTE网络具有延时短、传输距离远、传输速度快等优点,但其成本较高。WiFi是近场通信应用最广的技术,发展也较为成熟,且成本低。蓝牙是另一种短距离通信协议,其具有传输速度较快,信号不易受干扰、频谱全球不受限等优点,在物联网中应用较为广泛。用发展的眼光看,LTE(甚至即将到来的5G技术)和WiFi因其高速的传输速度、低延迟、抗干扰等优势成为未来农业物联网传输的主要媒介[18],也是当前物联网发展和研究的重要方向,因此选择AR9331型WiFi模块实现本项目数据传输功能。
将ser2net应用程序写入WiFi模块固件,当WiFi模块启动后,自动开启TCP Server服务,监听2001端口,等待客户端连接。当手机或计算机等控制设备连接上WiFi模块的热点后,打开TCP Client操控软件,使用2001端口,与TCP Server建立通信。
此时可利用上位机操控客户端使用write发送触发指令到2001端口,通过Ser2net推送到WiFi的TTL串口,下位机驱动板接收到指令后进行解析与执行。下位机也可以将各路传感器的数据利用Read通过串口发送到WiFi模块,被ser2net程序转发到2001端口,实现数据在上位机的显示。
(5)摄像头模块
本设计中选择KS8A17作为摄像头模块,使用索尼IMX179方案,800万像素高清高速自动对焦,分辨率为1 920像素×1 080像素,视频分辨率为1 080 p,帧速率最高30 f/s,感光尺寸达1/3.2″,暗光和逆光环境下可以保留更多细节信息。
(6)传感器模块
本设计采用DHT11型温湿度二合一传感器。相对湿度测量范围为20%~99%,测量误差为±5%,精度为1%,温度测量范围为0~50℃,测量误差为±1℃,单次测量间隔2 s,范围和精度符合农田数据采集的要求。
光照强度模块采用灵敏型光敏电阻传感器。
采用DS-CO2-20二氧化碳浓度传感器,此款传感器基于非分光红外吸收原理,具有单气室双通道,可获取两种波长红外光照射在接收感应器上的光强关系及其变化,根据二氧化碳对两种波长的红外光吸收比率函数,计算气室中实际二氧化碳浓度。有效量程为4×10-4~3×10-3,分辨率为1×10-6,精度±(5×10-5+5%FS)。
风速传感器采用热线式风速传感器模块,测量范围为0~30 m/s,精度为±(0.2 m/s+3%FS)。
土壤温湿度传感器采用基于FDR原理的ZZ-STHS-B模块,温度精度为±1℃,相对含水率精度达±2%,具有热响应时间短、动态误差小的优点。
2.2 机械臂构成与运动设计
为使土壤温湿度传感器插入土壤中,设计了机械臂模块。机械臂首尾依次转动连接的摆臂1、2、3、4,摆臂1底端通过支座与金属车身连接,另一端与摆臂2连接,各相邻的摆臂之间均通过与各摆臂垂直的转轴转动连接,各转轴均设有用于驱动转轴按设定角度转动的伺服舵机,摆臂4的前端设计了电机和嵌入式土壤信息传感器钻头(图2)。机械臂是由5个舵机控制,舵机由脉冲宽度调制(PWM)控制,PWM的原理是利用高电平宽度来控制舵机转动角度(0°~180°)。
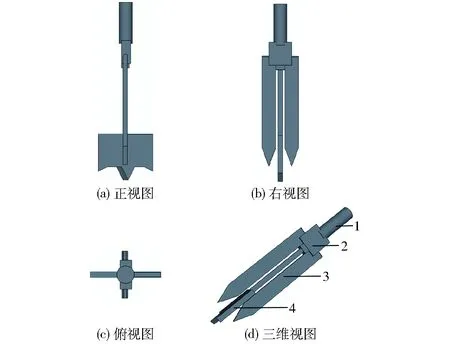
图2 嵌入式土壤信息传感器钻头Fig.2 Sketch of soil information sensor1.钻柄 2.夹持结构 3.土壤信息传感器 4.加宽钻头
使用Matlab软件借助机械臂工具箱Robotics Toolbox建立机械臂模型,即可实现简单的运动学仿真。按照改进D-H法建立机械臂坐标系,简化坐标系如图3所示,其中基坐标系和关节1坐标系重合(X0,1,Y0,1,Z0,1),关节2坐标系与关节1坐标系原点重合,为直观表示,图3中将关节2坐标系和关节1坐标系分开。由此得到机械臂连杆参数和关节变量如表1所示,其中,θi为关节角,di为偏置距离,ai-1为杆长,αi-1为扭角。
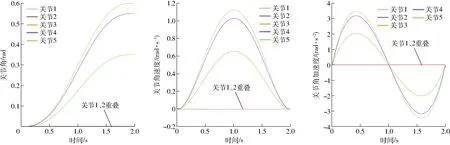
图4 各关节角度、角速度、角加速度与时间关系曲线Fig.4 Relationship curves between time and joint angle, velocity and acceleration

图3 机械臂各关节D-H坐标系 Fig.3 Arm joint coordinate system
设定机械臂初始化关节角为[0 0 0 0 0],运行程序如下
L1=Link([0 0 0 0],‘modified’); %定义各连杆的D-H参数
L2=Link([0 0 0 -pi/2 ],‘modified’);
L3=Link([0 0 30 0],‘modified’);
L4=Link([0 0 30 0],‘modified’);
L5=Link([0 0 30 0],‘modified’);
b=isrevolute(L1);
robot=SerialLink([L1,L2,L3,L4,L5]); %连接连杆
init_ang=[0,0,0,0,0,0]; %机械臂初始化角度
targ_ang=[0,0,0.6,0.55,0.35,0]; %机械臂终止角度
step=200;%设置步数
[q,qd,qdd]=jtraj(init_ang,targ_ang,step); %利用5次多项式计算轨迹

表1 机械臂D-H参数Tab.1 Robot’s arm D-H parameters
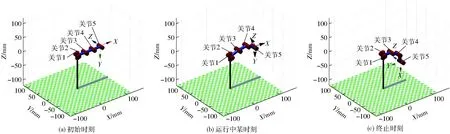
图5 机械臂三维仿真示意图Fig.5 3D simulation diagrams of arm
最终得到一个完整周期内每个关节的角位移、角速度和角加速度与时间的关系(图4)。从图4可以看出,随着机械臂的运行,每个关节的角位移、角速度和角加速度变化曲线连续且平滑。图5为机械臂初始时刻、运行中某一时刻和终止时刻的三维空间位置。经过Matlab仿真模拟和实际运行,机械臂在PWM控制下实际运行时,各关节和部件运行流畅、平稳,最终钻头位置垂直于地面。
2.3 农田信息采集车整体结构
将上述所选组件组装,得到农田信息采集车结构示意图如图6所示。考虑到车身电池和主板等发热源对传感器的影响,将温湿度传感器、光照强度传感器、CO2浓度传感器和风速传感器模块安装至车身尾部,减小自身发热源等可能产生的影响。
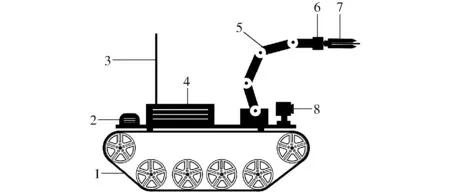
图6 农田信息采集车结构示意图Fig.6 Structural diagram of farmland information collection vehicle1.履带 2.温湿度传感器、光照强度传感器、CO2浓度传感器、风速传感器 3.WiFi天线 4.电源和控制主板 5.机械臂 6.钻头电机 7.土壤信息传感器钻头 8.可转动高清摄像头
信息采集车工作流程为:①打开采集车电源,通过WiFi与手机客户端连接,待各传感器预热完成后,开始工作。②采集车行走至第1个采样点,采集温湿度、光照强度、CO2浓度和风速数据,用时约5 s。③通过屏幕调整高清摄像头俯仰角和横滚角,拍摄所需行间作物茎秆、叶片等图像,用时约10 s。④发送机械臂控制信号,当机械臂运行完程序达到终态后,手动启动机械臂前端电机,并操作机械臂缓慢钻入土壤深5 cm,待稳定后测量土壤温湿度,用时约30 s。完成所有信息采集后,信息采集车行进至下一个采样点。
3 MCU程序与控制软件
3.1 MCU程序
板载程序使用Keil uVision4开发环境和C语言编写,通过ISP下载到主控芯片中。程序由main主程序、config初始化、selftest自检、motor电机控制、servo舵机等子程序组成,主程序简要代码如下
void main(void)
{
#ifndef DEBUG
{
TestApp_Init();//自检延时程序
}
#endif
UART_init();//串口初始化
Timer0_Init();//定时器0初始化(舵机定时器)
Timer1_Init();//定时器1初始化
Motor_Init();//电机初始化
Init_Steer();//舵机角度初始化
while(1)
{
Cruising_Mod();//全功能模式功能执行子函数
}
}
3.2 控制软件
手机客户端与采集车之间通过WiFi信道基于传输控制协议(TCP/IP)的方式通信,使用套接字Socket实现通信功能,满足手机遥控智能车与传感器数据回传的需求,通信框架如图7所示。其中手机作为客户端,WiFi模块作为服务器,其通信过程为:WiFi模块先声明一个ServerSocket对象,并且给定端口号,再建立与手机连接的Socket对象,并将其返回。调用ServerSocket的accept()来接收手机客户端的数据。如果没有数据请求,accept()一直处于等待状态,一旦接收到数据,将通过inputstream读取接收的数据。
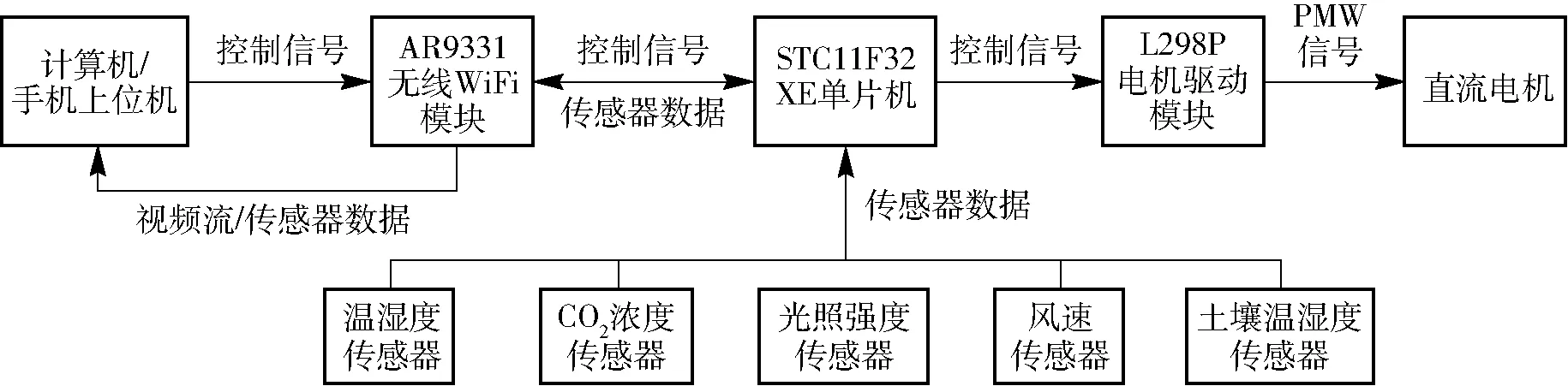
图7 采集车通信框架示意图Fig.7 Vehicle communication framework scheme
客户端创建一个Socket 对象,指定服务器的IP地址和端口号(Socket socket=new Socket(“192.168.1.1”,8000);),通过inputstream读取数据,获取服务器发出的数据(OutputStream outputstream=socket.getOutputStream()),最后将要发送的数据写入outputstream即可进行TCP协议的Socket数据传输,WiFi通信过程如图8所示。
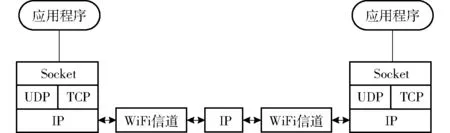
图8 采集车WiFi通信过程示意图Fig.8 Vehicle WiFi communication framework scheme
手机客户端系统分为4个模块,分别为视频组件、控制组件、传感器数据组件和系统设置,如图9所示。

图9 客户端系统设计方案Fig.9 Client system design scheme
该客户端以全屏模式第1视角实时显示车载摄像头画面,并可通过滑动屏幕空白部分调整摄像头角度,通过拍照和摄像按钮采集视频数据。传感器数据框内则显示传感器采集到的实时数据,另可查阅历史数据。农田信息采集车手机客户端主界面如图10所示。
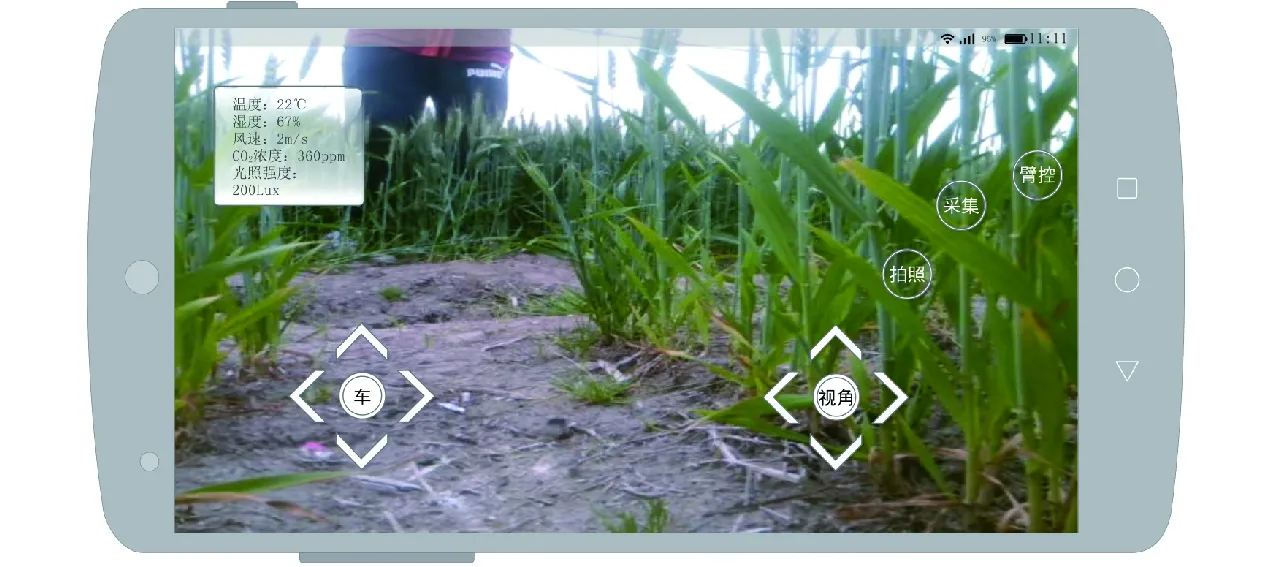
图10 农田信息采集车手机客户端主界面Fig.10 Mobile client main interface of farmland information collection vehicle
4 田间试验
经田间试验,农田信息采集车通过WiFi与手机连接,图像传输信号强,手机遥控操作延时在200 ms内,最大遥控距离45 m。低转速大扭力电机和宽履带式车轮可以保持最大0.8 m/s的速度行驶,越障最大倾斜角可达30°,在田间复杂环境下通过性强。车身小巧,能在行间距15 cm以上的作物行间完成前进、倒退、转向等操作。可以以第1视角观察到作物行间画面,视频画面流畅、清晰,在匀速行驶状态下平均帧率为21.3 f/s,视角调整精确。信息采集功能可完整实现,可以获取环境温湿度、光照强度、CO2浓度、风速等数据,通过搭载的机械臂和土壤传感器,获取土壤温度、湿度信息,单个采样点平均采集时间为45 s。
为了验证农田信息采集车所采集到数据的准确性,采用目前较为公认且精确度高的仪器设备与农田信息采集车采集数据进行对比,使用TES1370型非分散红外(NDIR)二氧化碳测量仪测量CO2浓度和温湿度,使用TES1340型热线式风速仪测量风速,采用TASITA8133型数字光照计测量光照强度,采用顺科达TR-6D型多功能土壤温湿度计测量土壤温度和湿度[19-20]。同时使用农田信息采集车和上述仪器设备测量8个点位数据,对比结果如表2所示,其中测量值为农田信息采集车所获数据,参照值为高精度仪器设备所获数据。
可以看出,农田信息采集车所采集温度、湿度、光照强度、CO2浓度、风速、土壤温度和土壤湿度与高精度仪器设备所测数据相关系数均大于0.90,说明农田信息采集车各传感器满足测量需求。
5 结论
(1)针对传统农业物联网系统存在传感器少、投入成本高、建设周期长和对环境不友好等问题,设计了一种以STC11F32XE微处理器为核心,搭载温湿度传感器、光照强度传感器、CO2浓度传感器、风速传感器和土壤温湿度传感器等的农田信息采集车,通过WiFi将控制设备与信息采集车连接,实现远距离遥控行走和农田环境信息采集。
(2)为解决土壤温湿度采集的需求,设计了钻头,将土壤传感器与加宽钻头结合,利用5自由度机械臂与钻头电机,实现土壤温湿度传感器钻入土下深度约5 cm,获取土壤温湿度信息。

表2 农田信息采集车数据与高精度仪器设备数据对比Tab.2 Comparison of vehicle data and high-precision instrumentation data
(3)田间试验表明:图像传输画面流畅、清晰,在匀速行驶状态下平均帧率为21.3 f/s,视角调整精确;遥控延时在200 ms内,最大遥控距离45 m,最大行驶速度为0.8 m/s,越障最大倾斜角为30°,可在行间距15 cm以上的作物行间行走;所采集温度、相对湿度、光照强度、CO2浓度、风速、土壤温度和土壤相对湿度与高精度仪器设备所测数据的相关系数均大于0.90;单个采样点平均采集时间为45 s。
猜你喜欢
新作文·高中版(2022年5期)2022-11-22
新作文·高中版(2022年5期)2022-11-22
——稳就业、惠民生,“数”读十年成绩单
人民周刊(2022年17期)2022-10-21
小猕猴智力画刊(2022年3期)2022-03-29
小猕猴智力画刊(2022年3期)2022-03-28
今日农业(2021年1期)2021-11-26
四川蚕业(2020年3期)2020-07-16
电子制作(2018年11期)2018-08-04
电子制作(2018年1期)2018-04-04
电子制作(2017年7期)2017-06-05
