
大田移动式精量配肥灌溉施肥一体机设计与试验
2019-11-04 09:21刘林李扬杨坤苑进郝明
农业机械学报 2019年10期
刘 林 李 扬 杨 坤 苑 进 郝 明
(1.山东农业大学机械与电子工程学院, 泰安 271018; 2.山东省园艺机械与装备重点实验室, 泰安 271018)
0 引言
我国大力发展现代化集约型农业,通过水肥一体化技术,将水肥溶液按比例由管路定时、定量、同步供给作物,实现节水节肥、高产增收的效果,已广泛应用于农业各领域的经济作物栽培[1]。但在大田粮食作物生产中,受到工况、成本、动力等方面制约,水肥一体化技术难以开展推广应用,水肥供应不同步现象严重。通过设计大田移动式精量配肥灌溉施肥一体机,将大田广泛使用的颗粒水溶肥料按比例掺混,在控制灌溉量和施肥精度基础上,提高系统的易用性、移动性、复用性,方便设备接入田间灌溉网,实现设备即插即用功能,有利于降低系统投入成本,提高农田投入产出比,对促进水肥一体化技术在大田中的应用有重要意义。
在国外已有的水肥一体化系统研究成果中,较有代表性的是以色列Eldarshany 公司提供的系列化自动灌溉施肥产品[2],其使用先进的Galileo/Elgal系列计算机控制系统,结合灵活多变的组态化操作界面能够为用户提供专家级灌溉施肥服务;加拿大CCS公司研发了主动精确注肥水肥一体机(PDI 技术)管理系统[3],应用于温室气候管理及灌溉系统;以色列Netafim公司则作为滴灌技术的发明者,将灌溉施肥产品进行了标准化、规格化[4]。在国内,李加念等[5]设计了文丘里变量灌溉施肥装置,采用PWM技术控制电磁阀改变文丘里进出口压力差,准确调节吸肥量;阮俊瑾等[6]设计了一种能实现自动灌溉、施肥、配方、混肥为一体的球混式水肥灌溉系统,但该系统主要解决面向温室大棚领域的液态肥料混合问题;周亮亮[7]研制了温室灌溉施肥控制系统,采用基于PLC 模糊系统控制,可依据作物需求供给水和养分。
已有相关研究多针对设施农业开展,直接抽取液体肥料进行混合灌溉,缺少大田环境下采用颗粒水溶肥料实时配比掺混、溶解灌溉的相关研究成果。本文研究大田水肥一体化技术,针对大田环境动力受限、系统投入成本高、颗粒肥实时比例掺混溶解等问题,设计大田移动式精量配肥灌溉施肥一体机;研究全自动灌溉施肥时间分配模型和母液浓度动态计算方法;设计实现一体机中央控制系统,研究并集成快速稳定母液浓度的控制算法;最后通过在大田环境中对试制样机开展自动化灌溉施肥试验,验证一体机系统的可行性和实用性。
1 工作原理与机械结构设计
1.1 工作原理
大田移动式精量配肥灌溉施肥一体机(图1)的机械部分包括移动行走架、精量配肥装置和首部枢纽装置。其中,移动行走架便于一体机在田间移动,精量配肥装置用于肥料比例掺混溶解和母液浓度动态调控,首部枢纽装置用于输送灌溉水和肥料母液,并为微喷带提供灌溉压力。
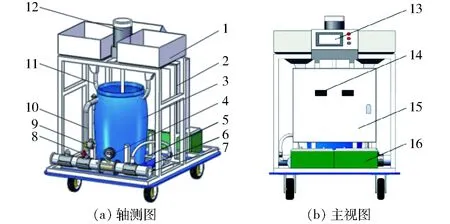
图1 一体机结构示意图Fig.1 Schematics of integrated machine structure1.肥料漏斗 2.移动行走架 3.母液罐 4.主管道流量传感器 5.母液罐出水管 6.注肥泵 7.主管道 8.电磁阀 9.支管道流量传感器 10.母液罐进水管 11.排肥口 12.搅拌电机 13.工控触摸屏 14.EC值显示器 15.蓄电池 16.控制箱
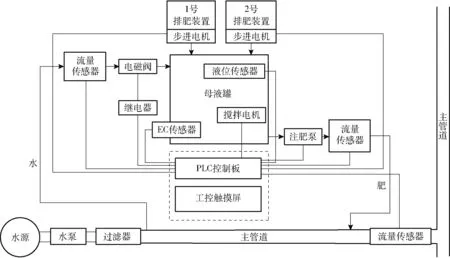
图2 移动式大田精量配肥灌溉施肥一体机原理图Fig.2 Schematic of mobile precision fertilizer farmland irrigation and fertilization machine
农户通过手持式测墒仪测量即时墒情,并在一体机上输入测墒信息、补灌面积和作物类型,一体机针对不同作物的灌溉施肥农艺要求计算施肥量和灌溉量,由中央控制单元实现全自动变比配肥、母液浓度动态计算调控和灌溉施肥控制。
一体机整体结构原理如图2所示。中央控制单元由工控触摸屏和下位机PLC控制板组成,其中工控触摸屏提供交互式良好的人机界面,PLC控制板提供对注肥泵、排肥电机、搅拌电机和电磁阀的驱动支持,并负责实时采集进出口流量、EC值(电导率)等信息。注肥时,通过在母液罐安装的EC传感器,实时监测母液浓度,控制排肥电机的转速调节肥料配比和排肥量,经溶解、搅拌作用后使母液浓度稳定在设定值,再由注肥泵将母液泵入主管道,实现肥料“随排、随配、随注”。母液罐进出口管道上分别装有流量传感器,母液配制过程中,可通过液位传感器检测母液罐中的液位,再通过控制电磁阀和注肥泵使母液罐内水的体积保持稳定。
1.2 移动行走架
移动行走架由不锈钢焊接而成,底部四角装有2个万向轮和2个定向轮,采用手推式结构,便于移动和转向。架上固定有精量配肥装置、首部枢纽装置和中央控制系统等部件,整机采用蓄电池供电,解决了田间动力供应问题。
1.3 精量配肥装置
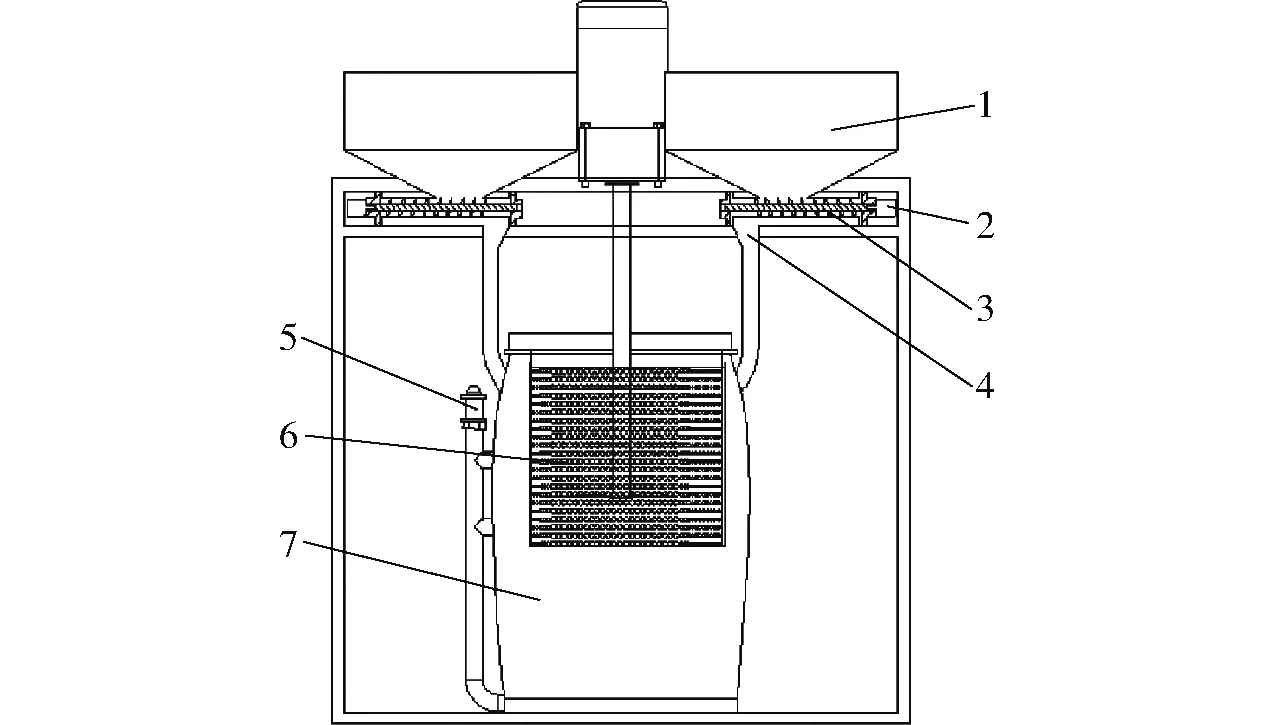
图3 精量配肥装置结构示意图Fig.3 Structure diagram of precision fertilizer dispensing device1.肥料漏斗 2.步进电机 3.螺旋输送器 4.排肥口 5.液位传感器 6.搅拌过滤器 7.母液罐
精量配肥装置由肥料漏斗、排肥电机、螺旋输送器以及搅拌过滤器组成,如图3所示。
工作时,精量配肥装置由步进电机通过减速器、联轴器驱动螺旋输送器,推进肥料在排肥口落入母液罐的过滤网桶中,经搅拌过滤器溶解。螺旋输送器的型号可根据施肥量计算得到,选用螺旋叶片直径为[8]
(1)
式中D——螺旋叶片直径,m
Qf——肥料输送量,t/h
ρ——物料松散密度,t/m3
φ——填充系数
K——物料特性系数
c——倾角系数
本文中选取肥料输送量Qf=0.07 t/h,以尿素为准,物料松散密度ρ=1.335 t/m3,查DT Ⅱ《固定式带式输送机设计选用手册》填充系数φ=0.3,查手册取物料特性系数K=0.063 2,倾角系数c=0.46。将上述参数代入式(1)中,可得螺旋叶片直径D=0.04 m。水平布置时,螺距和螺旋轴直径为
S=K1D
(2)
d=K2D
(3)
式中S——螺距,mm
d——螺旋轴直径,mm
K1——螺距系数,一般为0.8~1.0
K2——螺旋轴直径系数,一般为0.2~0.35
选取螺距系数K1=1.0,螺旋轴直径系数K2=0.25,将上述参数代入式(2)和式(3),计算得螺距S=40 mm,螺旋轴直径d=10 mm。
最终选择螺旋叶片直径为40 mm,螺旋轴直径为10 mm,螺距为40 mm的螺旋输送器。
搅拌过滤器主要对过滤网桶、搅拌电机和搅拌叶片进行选型。一般地,选择100目以上的过滤网就能满足水肥一体化的技术要求。搅拌叶片类型通过查询《搅拌与混合设备选用手册》,可知肥料溶解宜选用涡轮式搅拌叶片。此外,样机中选用直流搅拌电机, 由蓄电池供电,其额定功率PM计算式[9]为
(4)
其中
Ps=K3PvV
(5)
式中Ps——搅拌轴功率,kW
Kq——启动时的额定功率系数,一般为1
Pm——轴密封处摩擦损失功率,kW
η——传动系统机械效率,一般为0.8~0.9
K3——功率倍数,一般为1.2~1.8
Pv——平均搅拌功率,一般为0.3~0.4 kW/m3
V——母液罐溶液体积,m3
因样机的搅拌轴内嵌入母液罐中,认为轴密封处摩擦损失功率Pm=0,传动系统的机械效率η=0.8,取功率倍数K3=1.2,平均搅拌功率Pv=0.4 kW/m3,母液罐容量V=0.06 m3,经计算最终选用搅拌电机额定功率为36 W。
1.4 首部枢纽装置
首部枢纽是集中安装于系统进口部位的加压、调节、控制、净化、施肥、保护和测量等设备的集成,是为了正确选择和合理配置有关设备和设施,以保证微灌系统实现设计目标[10]。
首部枢纽装置主要包括过滤器、电磁阀、母液罐、注肥泵、液位传感器、母液罐进水管和母液罐出液管。首先,灌溉水经管道引入首部枢纽装置,在首部的管道分为两路:一路水肥溶液经主管道输送至田间管网;另一路通过母液罐进水管将水输送进母液罐进行母液配置,母液再经注肥泵注入到主管道中。母液注入主管道之前,需经过搅拌过滤器和安装在母液罐出水管120目的过滤器的两级过滤,防止母液杂质注入灌溉管网中。
在配置母液时,为确保母液罐内液体的体积保持稳定,安装液位传感器,来实时测量母液罐中液体的液位,并通过电磁阀的通断控制母液罐中溶液的体积。此外,汽油机水泵作为整个管道系统的总动力,根据实际情况也可以选用潜水泵,考虑到水泵体积重量以及工作环境,不把水泵放在一体机内部,在灌溉施肥时需将一体机与水泵现接现用。
根据农艺要求[11],小麦灌水定额为每667 m2的地块灌水40~80 m3,考虑到移动性和时间效率问题,可选择水泵流量为60 m3/h。
注肥泵流量需满足
Q1≥Q0/K4
(6)
式中Q1——注肥泵流量,m3/h
K4——母液稀释倍数
Q0——水泵流量,m3/h
根据农艺要求和生产经验,母液稀释倍数K4≥100,可满足灌溉施肥要求,求得注肥泵流量Q1≥0.6 m3/h。
注肥泵出口压力
p1>p0
(7)
式中p1——注肥泵出口压力,MPa
p0——主管道压力,MPa
在低压管道输水灌溉中,其管道压力一般不超过0.4 MPa[11],可求得注肥泵出口压力p1>0.4 MPa。
综上所述,注肥泵流量取10 L/min,压力取0.6 MPa。
2 全自动灌溉施肥时间分配模型
工作时,一体机通过设定的流程进行全自动灌溉施肥,按照大田灌溉农艺对灌溉施肥时间分配模型进行设计。通过在山东省多地市开展生产调研,以大田微喷灌水肥一体化技术为例,设计3段式灌溉施肥时间分配模型:第1阶段为灌溉阶段,通过喷洒一定灌溉水增加土壤湿度,软化土壤,减缓肥液在根的周围下渗速度,利于肥料吸收;第2阶段为灌溉施肥阶段,一体机将比例掺混好母液泵入主灌溉管道,实现大田同步灌溉施肥的目的;第3阶段为灌溉阶段,一体机停止泵入母液,主管道内继续灌溉一定水量,利用灌溉水冲刷主管道和支管道,清除管道内肥液残留,避免微生物在管道内滋生。
2.1 灌溉水量计算
单次灌溉水量计算与作物类型、生长期、土壤含水率有关。参照桑晓光等[12]的方法,通过仪器法实测数据计算单次灌溉水量,灌水定额公式为
M=100H(Wcvt-Wcva)
(8)
式中M——灌水总量,m3/hm2
H——测墒土层深度,cm
Wcvt——目标土壤体积含水率,%
Wcva——补灌前用仪器法测得的土壤体积含水率,%
以小麦为例,田间持水率取19.7%,土壤容重取1.37 g/cm3,不同生长期目标土壤含水率如表1所示[13]。
2.2 灌溉时间模型设计
考虑到一体机在第2阶段泵入的水肥量远小于主管道流量,可计算出总灌溉时间tz为
(9)
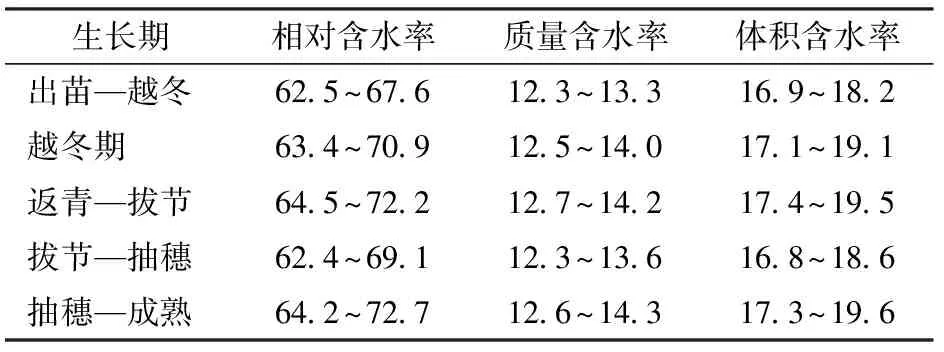
表1 小麦不同生长期目标土壤含水率Tab.1 Water content of target soil in different growing periods of wheat %
式中Q——主管道流量,m3/h
tg1——第1阶段灌溉时间,h
ts——第2阶段灌溉施肥时间,h
tg2——第3阶段灌溉时间,h
第1阶段灌溉时间取决于灌溉水在地层中的渗透速度和深度。为保证营养水分的充分吸收,作物在不同生长期对土层灌溉深度都有不同需求,以小麦不同生长期为例,其计划湿润地层深度范围如表2[11]。
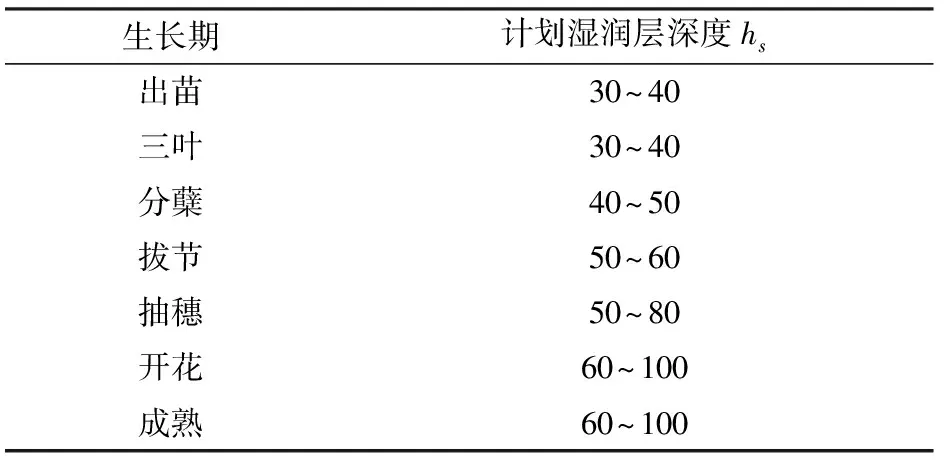
表2 小麦不同生长期计划湿润层深度Tab.2 Depth of planned wetting layer in different periods of wheat cm
第1阶段灌溉时间tg1为
(10)
式中hs——初始灌溉水渗透深度,cm
vs——灌溉水渗透速度,cm/s
灌溉水渗透速度与土壤入渗速率、土壤初始含水率、土壤容重、孔隙度等物理性质有关,不同区域存在很大差异。灌溉时可以通过土壤湿度传感器,实时监测计划土层湿度,动态调控灌溉时间tg1。此外,结合山东省多地市调查数据,实际灌溉时tg1可采用经验值代替,在粗略计算时取tg1≥10 min,可以满足大多数土壤类型的灌溉需求。
第2阶段时间分配决定了灌溉施肥浓度的大小。灌溉施肥浓度过大作物吸收后会引起细胞质壁分离,严重时会造成细胞缺水而死亡,灌溉施肥浓度过小则对肥料吸收和作物生长不利。在测量方法中,施肥浓度通常以肥液中电导率(EC)的形式反映,肥液浓度与EC呈线性关系。根据李加念等[14]提出的肥液浓度与其电导率线性关系函数可以计算出相对应的浓度。具体函数关系式为
ρz=0.209x-0.026
(11)
式中ρz——肥液浓度,%
x——肥液电导率,mS/cm
以小麦为例,施肥时EC一般在1~3 mS/cm范围内,根据式(11)计算浓度范围是0.18%~0.6%。考虑到相对于整个灌溉施肥过程,肥料溶解时间可忽略不计,计算ts为
(12)
式中ρz_min——作物施肥浓度的下限
ρz_max——作物施肥浓度的上限
Cs——单次追肥量
一般来说,第3阶段时间tg2可以通过总灌溉时间tz分别减去第1、2阶段的时间得到,即
tg2=tz-(tg1+ts)
(13)
另一方面,管道冲刷时间与干管路、支管路、微喷带的长短及肥料在所有管道内总残留量有关。假设第2阶段结束后,有
(14)
式中Vc——管路内肥料残留体积
因此,为保证管路冲刷效果,实际中tg2应取
(15)
需要说明的是,ts与tg2存在关联性,tg2的选择必然造成ts的浮动,tg2越大ts越小,在施肥量一定情况下,ts应在计算范围式(13)内调整,在满足tg2时间设定条件基础上最终确定时间ts和浓度ρz。
3 母液动态调控方法实现
3.1 母液浓度计算
根据上述分析,母液浓度ρm应该动态维持在一定数值上,该值计算与时间分配模型及施肥浓度ρz有关。根据质量守恒原理,可知
ρmQm=ρzQ
(16)
式中Qm——注肥管道流量
主管道流量和注肥管道流量均由流量传感器测量得到,因此母液浓度动态设定值为
(17)
通过设计母液动态调控方法,使母液浓度稳定于ρm。
3.2 动态调控模型
目前营养液调控方式大致分为3 类:基于EC 值的营养液调控、基于养分利用的营养液调控和基于作物模型的营养液调控[15-18]。其中,基于EC 值的营养液调控方式操作简单,实时性强,易于推广,当前大多数基于液态肥水肥一体化装备都是采用这种调控方式。本文针对颗粒肥水溶解,研究采用基于EC 值的营养液调控方式进行母液浓度调控的模型。
在一体机母液罐的2个进出水口安装流量传感器,考虑到颗粒肥溶解对肥液总体积的变化可忽略不计,故假设母液罐中溶液体积不变,同时假设罐中母液浓度与出水口浓度相同,根据质量守恒可得达到动态平衡时的方程为
(18)
式中ρm(t)——母液罐中母液浓度
ρc(t)——母液罐中出水口浓度
ρ0(t)——母液罐中进水口浓度
P1(t)——排肥机构1颗粒肥排肥量
P2(t)——排肥机构2颗粒肥排肥量
Q0(t)——母液罐进水口流量
Q1(t)——母液罐出水口流量
当系统达到稳态时,有Q0(t)=Q1(t),ρm(t)=ρc(t),且进水管取自大田井水,浓度相对于母液罐溶液浓度可忽略不计,即ρ0(t)≈0,则式(18)可简化为
(19)
单次灌溉时,Q1(t)可看作定值,令Q1(t)=Qd。而排肥量取决于排肥步进电机的转速,即正比于步进电机的控制脉冲
Pi(t)=KaSi(t) (i=1,2)
(20)
式中Si(t)——第i个排肥电机的控制脉冲
Ka——比例系数
当进行肥料比例混溶时有
S2(t)=KbS1(t)=KbS(t)
(21)
式中Kb——肥料混溶比
因此
(22)
再将其进行拉普拉斯变换可得
Vsρm(s)=KaKbS(s)-ρm(s)Qd
(23)
得到系统传递函数G(s)为
(24)
可以看到,肥料母液动态调控模型是1个一阶线性系统。由于肥料溶解需要一定延时,得到系统传递函数模型为
(25)
式中τ——时滞系数,s
3.3 肥料溶解时间分析
颗粒肥溶解过程是引起系统时滞的主要因素,通过搅拌可以加速肥料溶解,降低系统时滞。由于搅拌速度不同,不同肥料溶解时间也不同,有必要针对不同肥料研究最佳搅拌速度下的系统最小时滞问题。
针对常用追肥类型开展试验,选取水溶肥、小颗粒尿素(直径为0.85~2.8 mm)、大颗粒尿素(直径为2.8~4.0 mm)和氯化钾颗粒4种肥料,研究不同搅拌速度与溶解时间的关系。试验方法为:选取排肥机构中1个螺距所容纳的肥料为1个单位,设定搅拌电机在150~850 r/min转速范围内,以50 r/min的间隔调整转速,分别记录单位质量肥料在不同搅拌速度下的溶解时间,测得试验结果如表3所示。可以看到,随着搅拌速度增加,溶解速度逐渐变快,当搅拌速度达到一定值后,肥料溶解时间基本稳定。为简化系统设计,选取搅拌速度为650 r/min,此时试验所用水溶肥、小颗粒尿素、大颗粒尿素和氯化钾的溶解时间分别是8.8、11.5、52.2、53.0 s。

表3 不同搅拌速度下4种肥料的溶解时间Tab.3 Mixing time of four kinds of fertilizersat different stirring speeds s
3.4 调控方法设计
基于以上分析,可知在设定搅拌速度下,不同肥料的溶解时间(即系统时滞)不同。通常,PID控制方法被广泛应用于肥液浓度调控[19],且对于时滞较小的系统能够达到较好的控制效果,但对于时滞较大的系统,普通PID控制方法的效果很差,甚至很难保证系统的基本稳定[20]。
Smith预估器是克服系统大延迟环节的一种有效方法, 通过预估对象的动态特性, 用一个预估模型来进行时间延迟补偿, 补偿器与被控对象共同构成一个不含时滞的广义被控对象[21-23],从而有效削弱由系统时滞带来的影响。
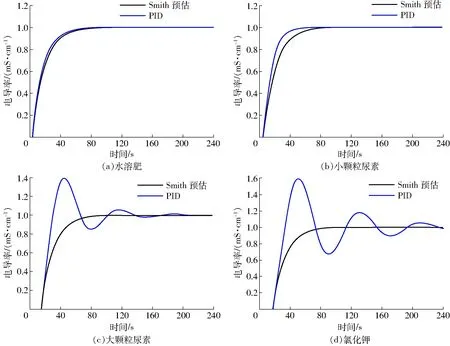
图5 切换控制策略仿真曲线Fig.5 Smith predictor and PID control strategy simulation curves
因此,针对肥液在母液罐中的不同溶解时滞问题,本文设计了一种切换控制器,集成增量式PID控制方法和含Smith预估器的PID控制方法,设计合理的切换策略,根据肥料类型在控制方法之间自动切换选择,以消除系统不同时滞现象,设计的切换控制器结构如图4a所示,含Smith预估器的控制器结构如图4b所示,Gc(s)为增量式PID控制器,2KaKb/(Vs+Qd)e-τs为被控对象,2KaKb/(Vs+Qd)为被控对象模型,e-τs是纯滞后环节,r是系统的输入,e是系统输入与输出偏差,u是控制器的输出,p是系统实际输出,d是外部干扰。

图4 母液浓度切换控制器Fig.4 Mother liquor concentration switch controller
3.5 仿真
为了验证切换控制对母液浓度调控的有效性,在Matlab软件Simulink环境中建立母液动态调控模型,进行切换控制算法仿真。
对表3中选用的肥料和溶解参数进行仿真,针对水溶肥、小颗粒尿素、大颗粒尿素和氯化钾分别设定系统仿真时滞为8.8、11.5、52.2、53.0 s。并针对以上系统时滞,设定PID参数[24-25],绘制切换控制策略下的浓度变化曲线,及单独采用PID或含Smith预估器PID的响应曲线,如图5所示。
从图5中可看出,试验用水溶肥和小颗粒尿素时,简单PID控制系统要比Smith预估控制的响应曲线效果明显,从100 s就开始接近稳定;试验用大颗粒尿素和氯化钾时,简单PID控制系统虽然出现超调量,但达到稳定时间仍快于Smith预估控制。而再随着延迟时间的增大可以看出简单PID控制系统超调量变大而且不稳定,Smith 预估控制效果明显优于简单的PID控制, Smith 预估控制的响应曲线从大约120 s就已经处于稳定状态。从而说明在母液动态调控过程,自适应切换控制会根据不同延迟的时间选用不同的控制方法,在小的时滞时可选用简单PID控制系统,在大的时滞时Smith预估控制系统对参数变化适应能力强。
4 控制系统设计与控制方法实现
一体机控制系统由以PLC为核心的下位机和友好人机界面的工控触摸屏组成,其中工控触摸屏与下位机之间通过485接口进行通信,用于执行数据采集处理、灌溉施肥量决策及灌溉施肥实时操作,包括数据实时采集模块、数据通讯模块、灌溉施肥量决策模块、灌溉施肥执行模块和工控触摸屏,如图6所示。
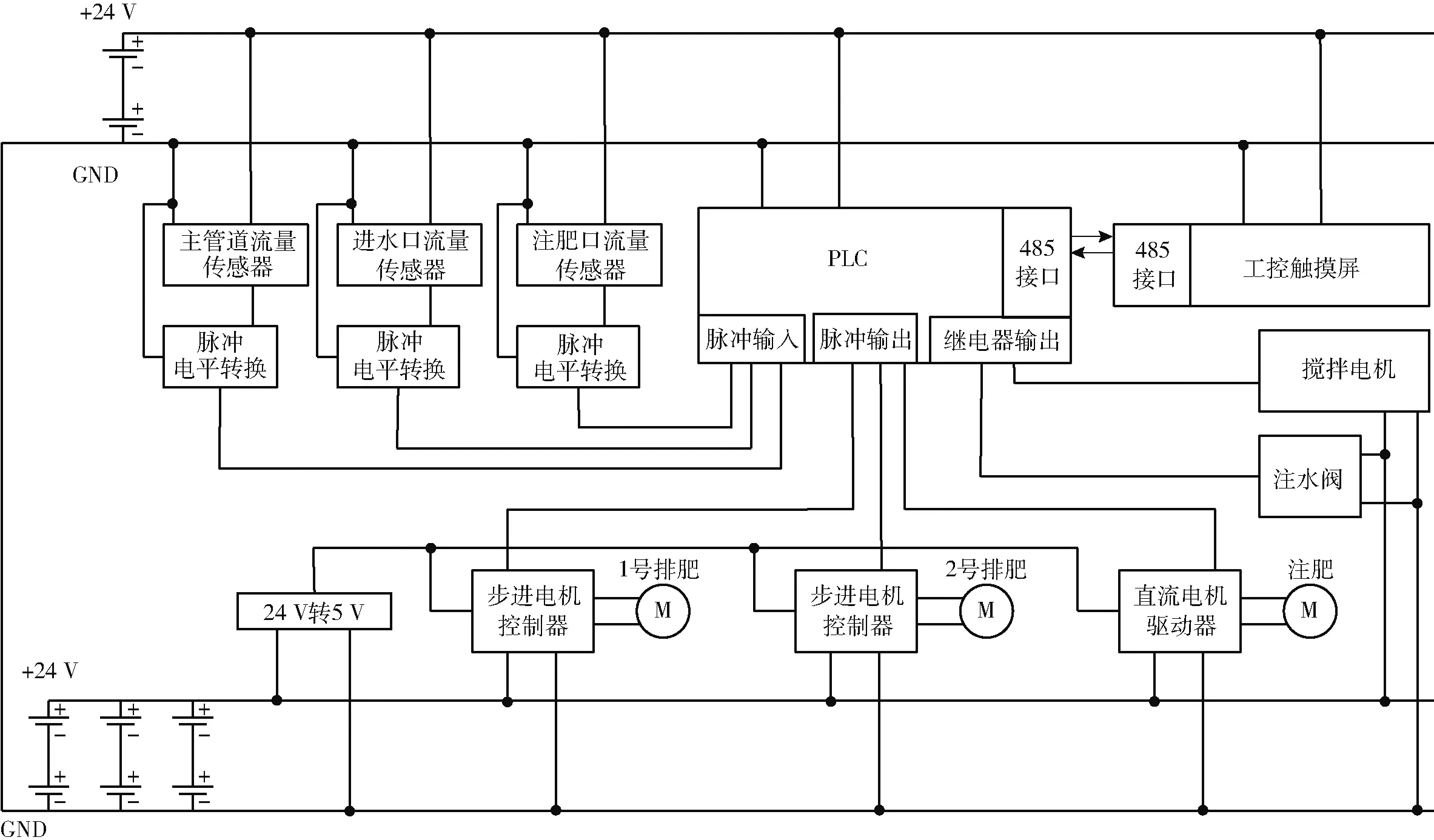
图6 一体机控制系统原理图Fig.6 Schematic of control system
数据实时采集模块采集流量传感器和EC传感器的数据并通过数据通讯模块传输到PLC,通过安装在工控触摸屏的应用软件及时显示采集的数据,为母液的配置提供数据支持。灌溉施肥量决策模块主要作出灌水量和施肥量的决策,通过测墒仪测得墒情进行测墒补灌,结合农艺补灌策略确定施肥类型以及施肥量。灌溉施肥执行模块进行母液配制和灌溉施肥阶段分配。母液配制过程中根据计算母液浓度设置EC参考值,并设置合理的排肥速度和搅拌速度,母液配制完成后分配灌溉施肥阶段进行3段灌溉施肥。工控触摸屏具有良好的人机交互功能,可以显示灌溉施肥过程中各个模块的工作状态,以及以触摸操作的方式设置EC值、排肥速度、注肥量等参数。一体机的工作流程图如图7所示,根据输入的灌溉施肥信息,计算出灌溉量和施肥量,并由中央控制单元实现全自动化灌溉施肥时间分配、母液浓度动态调控和灌溉施肥作业。
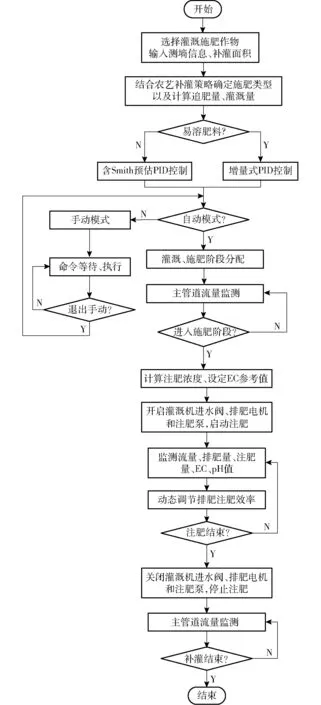
图7 一体机工作流程图Fig.7 Integrated machine work flow chart
5 试验
5.1 试验方法
针对建立的灌溉施肥时间分配模型和肥料母液动态调控数学模型,对大田移动式精量配肥灌溉施肥一体机分别进行灌溉施肥过程中注肥时间试验和母液配制试验(图8)。
一体机的整个系统是由基于PLC的嵌入式控制器控制母液浓度动态调控过程。母液罐的进出管均安装LWGY液体涡轮流量传感器,确保进出管中液体的流量相同,传感器量程为0.6~6 m3/h,精度为0.5%,母液罐进水管安装24 V电磁阀,出水管安装额定流量为10 L/min的注肥泵。排肥机构由57BYG250C步进电机驱动,扭矩为1.8 N·m。母液浓度由EC传感器实时监测,EC传感器的量程为0~10 mS/cm,精度为0.01 mS/cm。水肥一体化整个系统的操作可在工控触摸屏上进行,可实现混肥配方、实时检测、精量注肥等操作,整个过程实时采集的流量、EC、pH值数据通过RS485总线上传到工控触摸屏进行记录。整个系统由2块12 V、20 A的直流蓄电池供电,可持续工作。
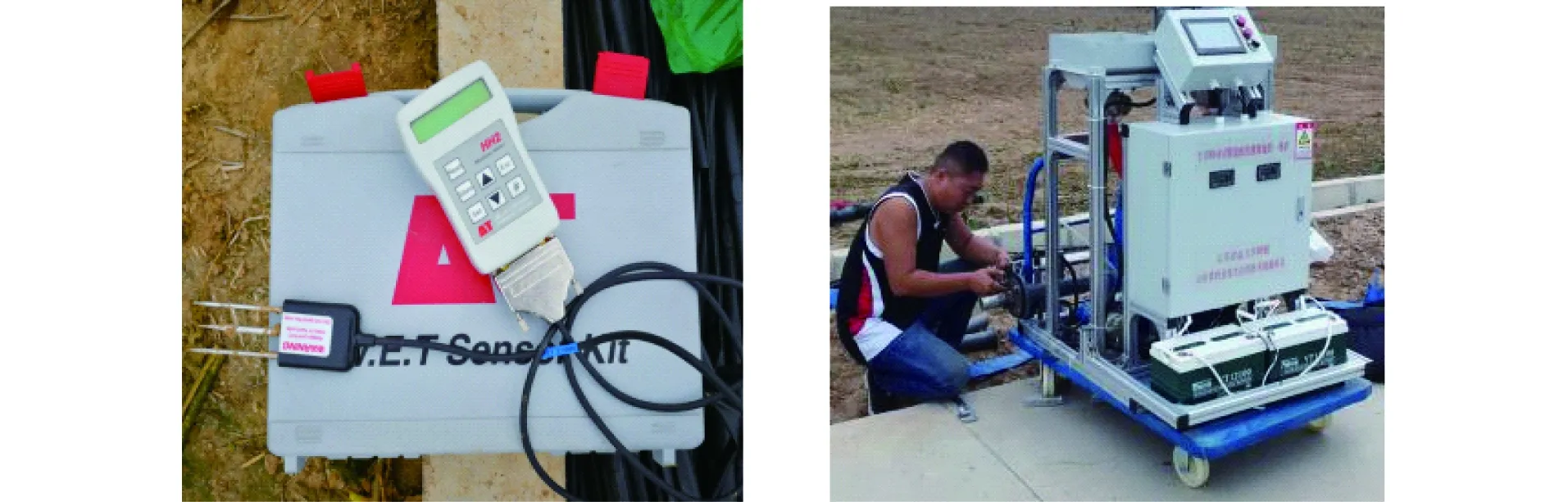
图8 试验现场Fig.8 Test scenario
一般农作物灌溉施肥时肥液EC小于3 mS/cm,试验设定EC为1 mS/cm。母液罐中装有50 L的清水,经测清水的EC值为0.277 mS/cm,母液罐的进水管和出液管通过控制电磁阀通断和调节注肥泵的流量确保进出的流量相等,以使母液罐中保持50 L水不变。以山东地区小麦为例,根据农艺要求,一般在拔节期追肥189 kg/hm2。
5.2 动态性能验证
设计了给定灌水量和施肥量情况下不同肥料的灌溉施肥试验,来验证灌溉施肥时间分配模型的准确性和母液浓度动态性能调控。根据对灌溉施肥时间分析可知,灌溉施肥分3阶段进行作业,分别是:先灌溉,再灌溉注肥,再灌溉。试验使用当地井灌区潜水泵作为水压源,潜水泵的流量是60 m3/h。根据农艺以及作物长势确定追肥量为每667 m2地块13 kg,经计算灌水量是50 m3,总共需要灌溉50 min。第1阶段灌溉时间是10 min,可根据实际情况进行调整。根据第2阶段灌溉施肥时间计算公式可以计算出第2阶段的时间为21~72 min,结合整个灌溉时间,取30 min。剩余为第3阶段的灌溉时间。灌溉作业时用秒表开始计时直到灌溉结束,同时EC传感器对母液进行电导率测量并记录数据,用电导率变化显示灌溉施肥3个时间阶段的变化。试验结果如图9所示。

图9 4种肥料的电导率试验结果曲线Fig.9 EC value test result curves of four kinds of fertilizer
从图中电导率变化曲线可以看出灌溉施肥过程分为灌溉、灌溉施肥和灌溉3个阶段。以水溶肥为例,8 min时排肥机构开始排肥,接近10 min时母液罐中肥液的电导率达到设定值1 mS/cm,这是第1阶段灌溉时间。母液罐中肥液的电导率达到设定值时开启注肥泵开始注肥,同时进水管电磁阀开启,实现边进水、边排肥混肥、边注肥,这是第2阶段灌溉施肥时间,本阶段持续时间较长,约为30 min。剩余则是第3阶段灌溉时间,约为10 min。经对比,试验数据与理论计算值基本吻合。同时,可以看出4种肥料基于自适应切换控制母液浓度达到稳态的时间分别约为2、3、4、5 min,这说明基于自适应切换控制的方法能够根据不同肥料快速实现母液的动态调控,可有效地减小延迟时间。
6 结论
(1) 针对颗粒肥在大田水肥一体化过程中母液动态调控时滞问题以及灌溉施肥时间分配问题,设计了移动式大田精量灌溉施肥一体机。根据一体机工作原理,建立灌溉施肥时间分配模型,简化颗粒肥母液动态调控的数学模型,并提出灌溉施肥自适应切换控制算法。
(2) 使用Matlab软件的Simulink进行自适应切换控制算法的仿真并经过现场试验,结果表明:一体机可根据3阶段的灌溉施肥制度完全实现全自动化灌溉施肥作业,且自适应切换控制会根据不同延迟的时间选用不同的控制方法,快速实现母液的动态调控,有效减小延迟时间。
猜你喜欢
农业工程学报(2022年6期)2022-06-27
农业工程学报(2022年6期)2022-06-27
纯碱工业(2022年3期)2022-06-16
农机科技推广(2021年3期)2021-08-02
新疆有色金属(2020年3期)2020-09-14
海峡姐妹(2020年6期)2020-07-25
杂文选刊(2020年4期)2020-04-19
海峡姐妹(2020年1期)2020-03-03
石油炼制与化工(2020年2期)2020-02-20
领导决策信息(2017年13期)2017-06-21
