基于语音控制的智能电动汽车研究
2019-11-02 06:17邱志华
通信电源技术 2019年10期
敖 勤,龙 洋,邱志华
(江西水利职业学院,江西 南昌 330013)
1 语音识别
1.1 语音识别概述
语音识别技术就是让机器通过识别和理解过程把语音信号转变为相应的文本或命令的高技术。语音识别技术可以分为两类,(1)对特定发音者的模式识别,使用者使用前需要进行简单的训练;(2)对非特定发音者的模式识别,使用者无需训练即可使用,并可以进行识别,任何人皆可随时使用此技术。
在工业生产与生活中,电动汽车作为最常用的行走机构得到了广泛的应用。将语音识别技术应用于电动汽车,赋予其听觉功能,能够接收和识别人类的语音信号,转换并执行相应的动作指令[1]。语音识别技术让电动汽车更加智能。
1.2 语音识别原理
语音识别本质上是一种模式识别行为,基本原理是先分析声波中各种频率的组成及其频率的时变模式,再结合语音数据库中的数据进行匹配运算,得出“语音”所包括的语言信息。语音识别的重要步骤包括声音信号的预处理和特征提取、训练建立参考模式库及模式匹配等,其基本结构如图1所示。

图1 语音识别系统框图
语音信号首先经过预处理(含AD转换)变成满足要求的离散数字信号;然后对其进行频谱分析,提取出语音信号的参数化表示(或称待识别未知模式),通常是由特征矢量构成的特征矩阵;在识别过程中,再把此模式和数据库中的参考模式进行比较;最后由识别决策来决定是否识别,并给出结果[2]。
预处理是指语音信号号在采集后首先要进行滤波、A/D变换、预加重及端点检测等措施,然后才能进入识别、合成及增强等实际应用。
特征提取部分的作用是将声音信号从时域转换到频域,为声学模型提供合适的特征向量。
训练是对预先收集好的海量语音、语言数据库进行信号处理和知识挖掘,获取语音识别系统所需要的“声学模型”和“语言模型”。
模式匹配是所有环节的关键点,其作用是将输入的语音特征与声学模型(模式)进行匹配与比较,得到最佳的识别结果。
2 电机驱动原理
本文采用直流电机的驱动电路,能够驱动直流电机,在单片机的控制下,使电机独立正转、反转或停止。为了使电机驱动电路和单片机控制电路电气隔离,可以采用光电耦合器连接这两部分。这可以使电机和控制器分别供电,单片机的IO口线连接,控制电机的正反转,单片机的一根IO口线连接电机,对电机的转速进行控制。
当电动机出现故障时,其保护电路能够及时发现并排除故障,保证电机能够正常地运行而不受损坏。其保护电路分为过电流保护、欠电压保护、刹车保护及过电压保护。为了能够快速响应,采取中断方式实现。
当电动机出现过电流时,单片机能够检测出来并作出反应,其工作原理是通过电阻R17取出电流信号,并把电流信号转换为电压信号;当电流过大时,LM321输出端就会由高电平变成低电平,通过数字信号处理,转换为中断信号,并传输给单片机,使其产生中断。
当电动机出现过电压时,单片机能够检测出来并作出反应,其工作原理是电源电压是通过电阻R37取出电压信号;当电压过大或大于38 V时,Q6由截止变成导通,输出端就会由高电平变成低电平,通过数字信号处理,转换为中断信号,并传输给单片机,使其产生中断。
当电机正常工作时,由R8取出电压信号为4.9 V;当电动机刹车时,其电压被短路,其输出由高电平变成低电平,通过数字信号处理,转换为中断信号,并传输给单片机,使其产生中断。
当电源电压过低时,单片机能够检测出来并作出反应,关断电压,使电源停止供电,使电源不至于发电过多而影响下次的使用,保护电源,其工作原理是电源电压通过电阻R22、R29、R33取出电压信号,当电压过小或小于31 V时U8D输出端就会由高电平变成低电平,通过数字信号处理,转换为中断信号,并传输给单片机,使其产生中断。L298N电机驱动逻辑控制如表1所示。
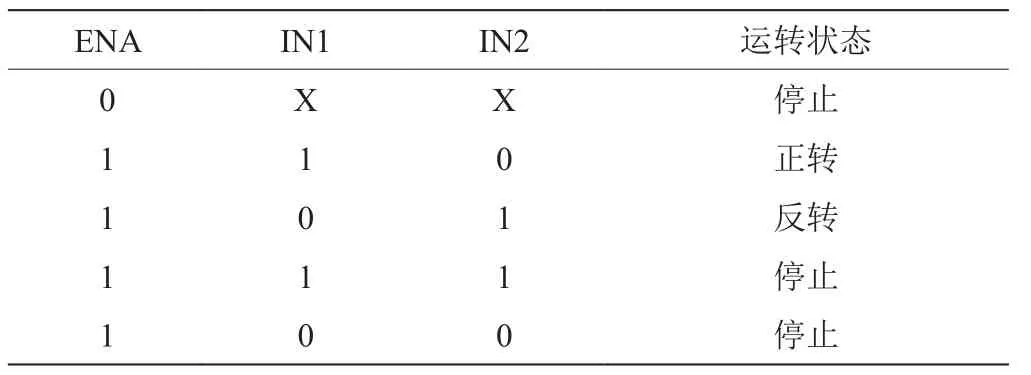
表1 L298N电机驱动逻辑控制
根据电机驱动逻辑功能表,通过改变单片机IO口高低电平变化,可以方便实现电动汽车前进、后退、左转、右转及停止。
3 电动汽车速度控制
脉宽调制(PWM)是靠改变脉冲宽度来控制输出电压,通过改变周期来控制其输出频率。输出频率的变化可通过改变此脉冲的调制周期来实现。按一定的规则对各脉冲的宽度进行调制,即可改变逆变电路输出电压的大小,也可改变输出频率[3]。
电机的驱动采用双向PWM脉宽调制方式控制,电机驱动电路如图2所示。采用这种控制方式可以方便地实现电机的正反转和转速变化,其工组原理为当P1.0端口为高电平、P1.1端口为低电平时,三极管Q5导通,Q5导通又导致Q3和Q2导通,则电流从电源通过Q2、直流电机和Q3构成回路;当P1.0端口为低电平、P1.1端口为高电平时,三极管Q6导通,Q6导通又导致Q4和Q1导通,则电流从电源通过Q1、直流电机和Q4构成回路,且电流方向和前面相反,即电机转向发生变化。通过控制P1.0口和P1.1口电平的高低和高电平导通的时间,可以控制电机的正、反转和转速[6]。
4 语音控制电动汽车
4.1 语音控制模式
本课题使用的语音模块如图3所示,是一款非特定人语音识别模块,无需编程,用户无需深入了解语音识别的原理,简简单单的拼音设置即可识别,并会通过串口识别结果。但是语音识别都会存在误识别的情况。例如,平时谈话时出现了和命令相似的发音,模块会误判。以目前的语音识别的技术,误判情况还不能被消除,故本模块嵌入了3种识别模式。
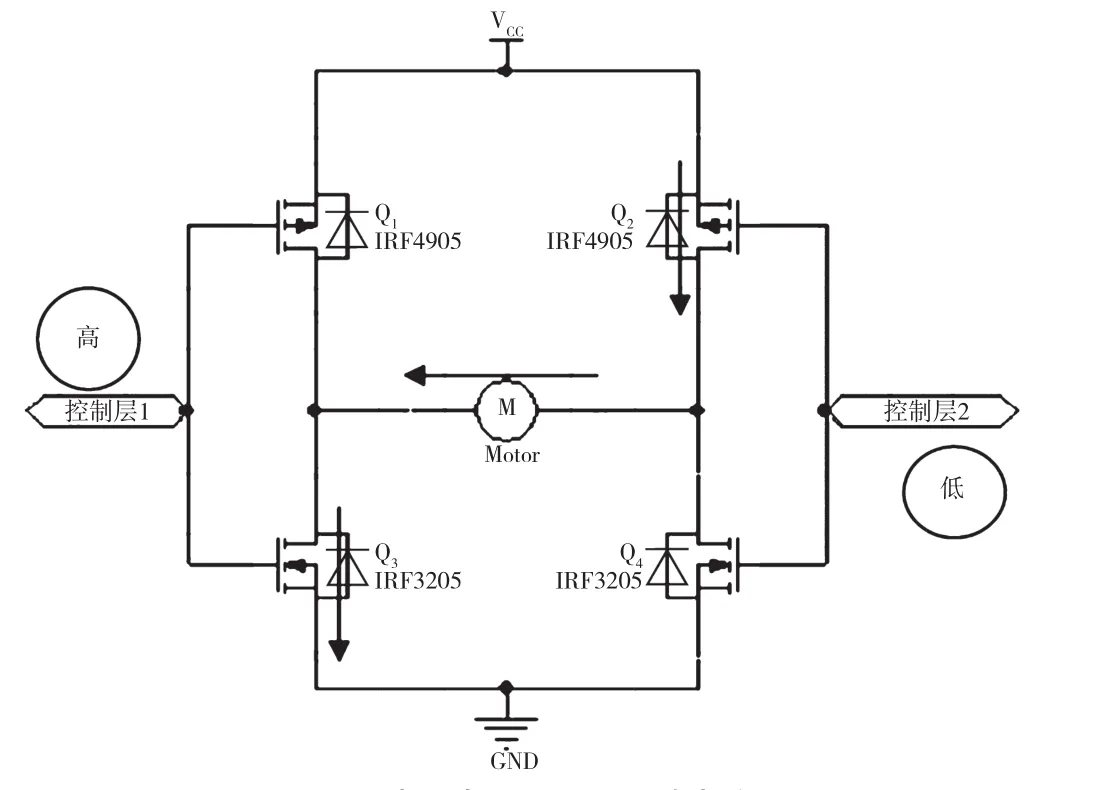
图2 直流电机PWM驱动电路
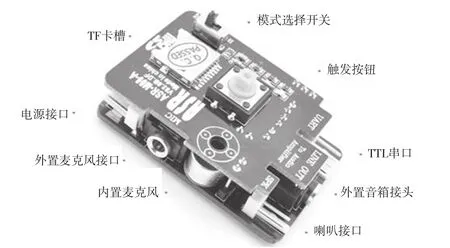
图3 语音模块说明
4.1.1 循环检测模式
这个模式下模块是不停检测周围的声音的,所以使用者任意时刻说对了指令都会被检测并识别。这个模式的缺点是有比较大的误识别(谈话时出现了命令相似的语音,模块就会误判,可使用增加屏蔽词的方法消除误识别。),可应用于机器人问答或者对话玩具。
4.1.2 口令检测模式
两条指令控制一个动作。只有口令说完后的8 s内说出指令模块才会识别,如果超过了8 s就要重新说口令。这种模式很大程度上解决了因模块误识别而造成电器误动作,可以设置识别到口令的提示音,提示用户在规定的时间内说出指令。
4.1.3 按钮检测模式
每按一次按钮讲出指令才能识别,8 s后要重新按按钮才能识别。缺点是每次识别都要事先按一次按钮、可以应用于家电控制、智能开关等。这种模式彻底消除了模块的误识别,可靠性高。
4.2 实验过程
本课题选择口令检测模式进行实验,实验时对语音模块接收装置发出规定口令,如高速前进、中速前进、低速前进、高速后退、中速后退、低速后退、左转及右转等,观察电动汽车的运行情况。实验表明,电动汽车对语音指令完成相应的动作效果理想,但也存在一些误判和不执行的情况,主要原因是环境噪声以及声音大小影响语音指令。后续完善措施包括语音指令的去噪声处理、语音指令的丰富及相应的电动汽车执行动作的丰富。
5 结 论
本次设计是智能语音控制电动汽车兼有避障功能,主控制芯片采用STC89C52单片机,借助市场比较成熟的语音芯片,成功实现了语音控制电动汽车和电动汽车的自动避障的功能[4-5]。设计内容包括电动汽车硬件、软件、语音识别单元及调试等。根据系统要实现前进、后退、左转、右转、速度控制(高速、中速、低速)、停车及避障等功能编写出电动汽车端的软件程序,最终电动汽车达到设计的基本要求。电动汽车虽然基本功能实现,但仍存在一些问题,控制的稳定性并不高,功能也比较简单,仍需要不断完善。
猜你喜欢
山西电子技术(2022年1期)2022-02-28
内蒙古电力技术(2021年5期)2021-11-21
莆田学院学报(2021年5期)2021-11-13
科学与财富(2019年7期)2019-10-21
科技传播(2019年15期)2019-08-22
速读·下旬(2019年3期)2019-04-11
汽车维修技师(2018年7期)2018-12-07
电子技术与软件工程(2017年10期)2017-06-02
电子技术与软件工程(2017年2期)2017-03-15
汽车电器(2014年2期)2014-12-02