月球车移动系统可靠性试验技术研究
2019-10-31 01:35杨晓青罗小桃刘殿富王卫军
载人航天 2019年5期
杨晓青,罗小桃,刘殿富,2,王卫军,3
(1.上海宇航系统工程研究所,上海201109;2.上海市空间飞行器机构重点实验室,上海201108;3.中国航天科技集团有限公司空间结构与机构技术实验室,上海201108)
1 引言
移动系统在月球表面,与在地球表面行走差异较大,主要是因为地球土壤与月壤在力学特性的差异所致。为真实模拟月球车在轨工作环境和状态,需要在地面建立一套有效的试验模拟系统,进行车轮与月壤接触特性的模拟、月面着陆区地形的三维重构、月球车地面行走时1/6g低重力状态的模拟、月球车从着陆器上可靠分离至月面的全过程模拟、移动系统在月面地形通过性测试等,保证月球车试验的充分性、有效性和可靠性,从而正确评估月球车的性能和在轨工作能力。
20世纪70年代,俄罗斯的无人探测器和美国的载人登月车登上月球,20世纪末和21世纪初,美国多辆火星巡视器登陆火星。国内地外天体巡视器的试验移动系统地面试验技术将是全新自主的尝试。本文对月球车移动系统研制过程中进行的所有地面测试和评价设备、方法进行总结,从温度、密封、壤力学性能、非结构化地形地貌、低重力模拟、释放分离、移动功能与性能等方面开展试验验证。
2 月球环境及试验设备现状分析
月球月昼和月夜的温差高达300℃以上,移动系统在无任何主动热控措施的情况下需承受300℃以上的温差。目前空间机构的环境温差均小于月球环境,因此需要研制新的实验设备以适应新的温差范围。
月球表面月尘带静电,极具吸附性,容易吸附在活动部件的关节处,因此需要对活动部件采取有效的防尘密封措施,提高移动系统的寿命和效率。目前没有针对高低温和扬尘环境下密封件的试验方法,需要新建试验方法,有效评价密封件的防尘效果。
作为月球车运动的载体,月壤是研究月球车移动特性不可或缺的部分。如何将月壤的物理力学性能与模拟月壤的颗粒大小、粒径级配、配置过程的扰动程度、烘烤程度等几何参数建立联系,配备出符合工程要求的模拟月壤需要进一步研究。
由于月表形貌的复杂性、月壤物理力学参数的离散性、非规则结构轮与非规则化路面接触面积的不确定性,因此需要结合仿真分析和丰富的经验获得准确的移动通过性参数,配合车轮台架试验,建立一套易实现且可靠的轮壤作用特性地面验证系统。
月面为非结构化路面,地形复杂多变,不同地形地貌下月球车的性能需要充分考核。同时由于不同区域月壤粒径和力学性能差异,月球车的极限能力也不尽相同。因此地面需要构建不同的极限地形进行组合以考核月球车的在轨工作能力;需要根据指标要求,采用地形典型化、标准化、模块化设计和划分典型功能试验区相结合的方法,建立一套模拟月表非结构化路面的地形地貌试验区域。
月球重力为地球的1/6,月球车地面各项运动与在轨各项运动之间的等价关系无法通过理论或经验来评价。因此需要建立一套1/6g低重力平衡吊挂装置,在移动系统爬坡、越障、转向等姿态连续变化或突变时,抵消移动系统多余的5/6g的重力,从而评价地面试验的有效性。
由于着陆区的地形充满未知可能,因此着陆器着陆后的姿态是不确定的,只能控制在一定的指标范围内。地面需要对该指标范围内的所有组合角度进行模拟,建立一套着陆器模拟系统,模拟着陆后的不同的角度组合,从而开展移动系统在不同姿态下的分离试验,验证分离能力。
月面环境复杂、地形多样,移动分系统在轨工作过程中每个动作都涉及多种性能,地面需要考核的指标多。试验设计中需要将性能指标转化为可测试的试验项目,测试中控制产品与环境状态以保证测试结果与技术指标的准确对应,并对各项指标的极限能力形成准确认识。在轨工作时产品各性能都是相互作用的,地面测试获得单一功能或性能的最大值并以少量参试样本、有限试验次数充分验证产品可靠性方案在国内外暂无公认的通用标准,均需根据产品实际情况进行分析,提出一系列具有科学依据并切实可行的试验方法。
3 可靠性试验技术的组成
月面巡视器移动分系统需要验证的技术指标繁多、验证复杂,为了真实可靠地模拟移动分系统月面工作情况,地面试验系统围绕在轨任务开展,移动系统地面试验技术构成见图1。其主要包括月面极端温差试验技术、密封件大温差扬尘环境试验技术、月壤力学性能模拟技术、非结构化地形地貌综合模拟、月面轮壤作用地面试验技术、低重力环境模拟技术、释放分离集成模拟技术、月面移动功能与性能验证技术。可靠性试验按照先部件后系统的顺序进行。
3.1 月面极端温差试验技术
结合材料学、热学、机构学、气动学等专业知识,同时对密封、热、控制、结构和整体布局等进行集成设计,研制一套长时间高效深冷环境模拟系统、一套超高真空环境模拟试验系统,实现地面长时间极端温度和超高真空热环境的模拟,解决了移动分系统产品月夜极端温度适应能力与超高真空环境适应性验证难的问题。
该深冷生存试验系统由深冷容器系统、斯特林制冷系统、冷水机组、氦气冷量供给系统、氦气补气与抽气系统、液氮供给系统、液氮回收系统、气氮供给系统、真空泵抽气系统和控制系统构成。它主要有2大特点:
1)冷却速度快。辐射冷却的方式随着物体间温差的缩小,冷却速率急剧减小,通常需要几十个小时的时间才能降低到目标温度。且该目标温度受冷源液氮的限制以及有限时间内存在有限温差的限制,一般在-170℃以上。本系统则采用内部非真空条件的工作模式,即在试验罐体内部工作区域充注氦气,除与热真空罐相同的辐射换热外,增加了氦气在腔内进行自然对流和导热的双重强化传热效果,从而大大加快了对目标产品的降温速度。研究表明,在27℃至-188℃的降温过程中,降温速率可保证大于 3℃/min,在-188℃至-205℃的降温过程中,降温速率也大于0.4℃/min。其直接效果是使得原先通过真空罐冷却所需的时间缩短为几十分之一。
2)工作温区宽。系统设计工作温区为-205~+100℃,通过内置加热笼的方式,高温可以到达160℃。设计中除了布置液氮冷却通路外,主要采用大制冷量斯特林制冷机为冷源,该制冷机可在-205℃提供1200 W制冷量,在-253℃提供200 W制冷量,这为系统扩展至更低工作温区提供了条件。同时斯特林制冷机中的循环系统保证了资源的有效利用,为长达15天的长时间深冷试验提供了保障。
移动系统深冷高低温存储的温度为+155~-190℃,移动系统主要运动部件的温度试验均在此高低温箱中完成。这套试验系统的建立为移动系统研制工作的顺利开展提供了必要条件。
3.2 密封件大温差扬尘环境试验技术
结合密封圈的工作环境,包括大温差、真空和月尘吸附等,建立密封圈性能测试系统,该测试系统包括密封圈安装轴、扬尘空间、密封圈和月尘收集器,结构如图2所示。在扬尘空间内,有扬尘机构不断将该区域内的模拟月壤翻至密封件的密封部位,同时密封圈安装轴与驱动工装连接,在测试过程中,密封圈安装轴按照给定速度不停转动。

图2 防尘测试系统的主要组成Fig.2 Composition of dust prevention test system
在防尘能力测试时,将一整套测试设备全部置于高低温箱中,保证密封件工作在不断交变的温度环境下。当在规定的时间内,密封圈转过规定的圈数后,试验结束。此时将采集器从测试设备上拆下,用放大镜观察采集器上有无模拟月壤。如果在采集器上没有发现模拟月壤,则说明密封件通过防尘功能测试,该密封件的材料、密封形式能够满足月面使用要求。
防尘测试试验系统全面地测试了密封件的密封性能,将温度因素、月尘的吸附特性、针对活动部件防尘的特点、密封件的长寿命防尘等特点融为一体。原理清楚,测试方法正确,测试结果有效。
3.3 月壤力学性能模拟技术
模拟月壤制备时,采用同质原料进行模拟月壤的制备,重点分析粒径分布对力学性能的影响,根据需求设计不同粒径级配方法实现月壤力学性能的相似模拟。
根据需要制备了SNJ系列应用于月面车辆力学基础试验的多种模拟月壤,其性质参数在月壤样本的变化范围之内,见表1。
对月壤粒径分布与承载特性进行专项研究,分析得出粒径分布对模拟月壤承压性能影响大:粒径粗且分布均匀的模拟月壤承压能力强;相对粒径越小、颗粒越均匀,承载能力越差[2]。根据现有资料,真实月壤中值粒径分布为 44~130μm,根据需要,共研制了5种SNJ系列中值粒径模拟月壤[3]。详见表2,其中SNJ-2为大范围测试用壤,其他为摸底试验用壤[4]。

表1 月壤及模拟月壤力学参数指标Table 1 The mechanical parameters of lunar soil and simulated lunar soil

表2 SNJ系列模拟月壤的中值粒径Table 2 The median diameter of SNJ series simulated lunar soil /μm
配备不同粒径的模拟月壤,并对它们的物理特性进行研究,从而建立模拟月壤的物理力学性能与粒径大小、配置过程等几何参数的关系,用以研究模拟月壤的承载特性,为后续的单轮台架试验和移动系统的综合仿真和测试提供理论和物质基础。
3.4 非结构化地形地貌综合模拟
根据探测器着陆区附近的地形,结合移动分系统试验项目规划,将地形简化为平地、斜坡、坑和障碍3种类型。根据试验场的试验区面积大小,按照真实月表的坑和石块的分布概率进行估算,得出试验场中坑的个数、石块直径和数量。
试验场地按验证产品指标项目进行区域划分,形成月表形貌综合模拟试验室。试验室内设有直线行驶区、固定斜坡区以及固定斜坡模拟块、转向区、越障区以及典型障碍模块、V形坑区、可调斜坡区以及可调斜坡设备、综合形貌区、不同模拟月壤下移动性能摸底测试区等,如图3所示。
月表形貌综合模拟试验室中角度可调斜坡装置可构建5°~45°之间任意一个坡度值的斜坡,与典型障碍组合,可实现各种极限地形地貌快速构建,用于进行月球车的不同模拟月壤的极限坡度适应能力、一定坡度下越障极限能力、一定障碍下最大坡度适应能力的考核[5]。

图3 月表形貌综合模拟试验室图Fig.3 Comprehensive simulation laboratory for lunar landform
通过地面轮壤试验测得,车轮扰动深度不超过20 cm,因此月面形貌综合模拟试验场地铺设厚度为30 cm。在模拟月壤场地整备时,根据月壤密度垂直分布特点,逐层进行模拟月壤初始铺装,以减少底部模拟月壤的容重不均匀现象,并模拟底部月壤的密实状态。对表层模拟月壤进行旋耕翻松处理,深度在150~200 mm范围内,模拟月表扰动层在自然堆积下的疏松状态。为避免外界干扰,使用专用整备平台将铺设的模拟月壤表面刮平后,通过散落法制备出不小于10 mm的极度松散模拟月壤浅表层,模拟月球表面散落月尘的自然状态。模拟月壤初始铺装工艺流程见图4。
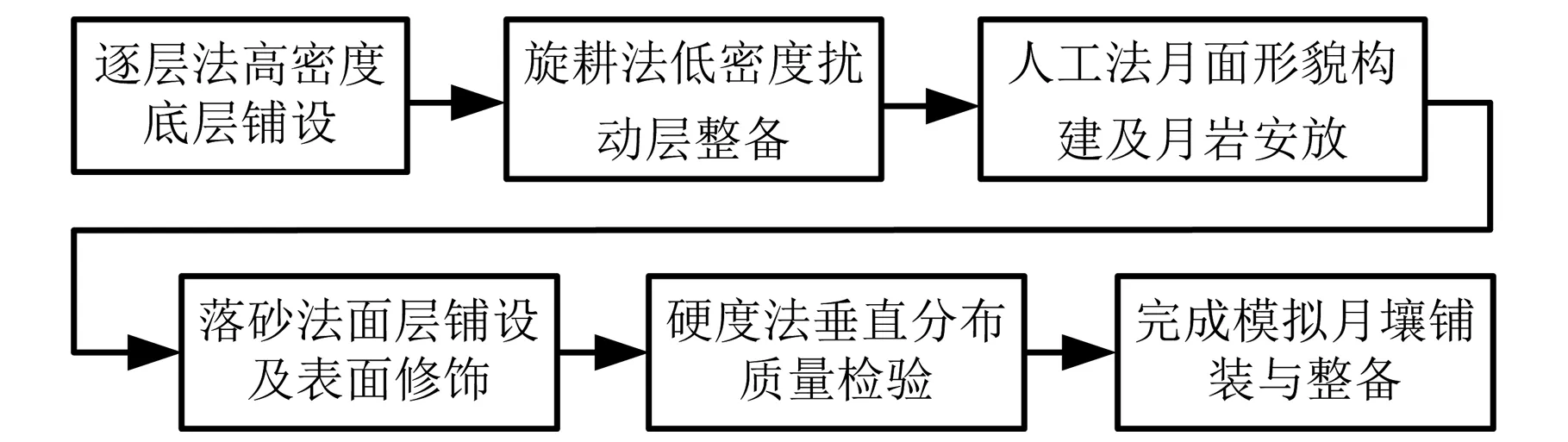
图4 模拟月壤铺装与整备流程Fig.4 The pavement and treatment of simulated lunar soil
场地铺设完毕后,对模拟月壤疏松度进行测试,测试设备如图5所示,在一定重力载荷作用下,圆锥仪相对模拟月壤下沉一定的深度,通过测量杆上对应的尺度,换算出该测试点模拟月壤疏松度[6]。

图5 模拟月壤疏松度测试装置Fig.5 The testing device for prosity of simulated lunar soil
在有限资源情况下模拟地形地貌,构建出不同的极限地形组合以考核月球车的在轨工作能力。模拟月壤的铺设方法,在国内外没有通用标准,试验发现通过模拟月壤疏松度测试能控制模拟月壤特性的一致性,从而提高移动系统与轮壤相关的各项试验的准确性。
3.5 月面轮壤作用地面试验技术
车轮与月壤的接触特性和承压特性是月球车移动系统在月面移动的理论基础,需研制滑移小、牵引力大、通过性强的车轮[7]。
基于轮壤作用动态仿真系统研制轮壤作用试验系统,通过高精度传感器的合理布局和结构设计,牵引力测量精度可达0.05 N;车轮沉陷量测量精度可达0.1 mm;车轮驱动力矩的测量精度可达±0.5%FS,试验系统见图6。

图6 轮壤作用试验系统Fig.6 The test system for interaction between wheel and soil
该轮壤作用试验系统可实现的功能包括:
1)通过力矩传感器的车轮载荷反馈,对车轮进行实时闭环加载;
2)精确设置车轮运行参数,自动控制试验车轮的转动速度和前进速度;
3)在车轮过坑、越障等过程中,加载台随车轮垂直位置的起伏自主跟随和退让;
4)配备各类精密传感器,实时精确测量车轮的挂钩牵引力、侧向力、滑转率、沉陷等参数;
5)实时显示测量数据,并通过可视化曲线观测特性参数的变化趋势;
6)实时计算车轮的侧偏性能、转向性能、越障性能、爬坡性能、抗侧滑性能等力学特性,用于模拟巡视器在非结构环境中克服几何障碍而正常通过各种地面和地形的行驶能力。
通过建立该轮壤作用试验系统突破场地的限制,更加专注地研究车轮与模拟月壤之间的作用关系。利用模型计算结果进行车轮多方案比较,再通过轮壤作用试验系统,从而获得最优的车轮构型。
3.6 1/6g低重力环境模拟技术
月球车在月面工作时为1/6g低重力,因此地面需要模拟月球车运动时的低重力,才能更真实地模拟月面工作情况。移动系统地面低重力模拟状态如图7所示。该低重力模拟装置包括恒张力控制系统与吊挂位姿跟踪子系统[8]。
通过恒张力控制系统来实现吊挂力的快速调整,该系统主要由收放吊索机构、力控制机构、定滑轮、倾角测量机构、力传感器、弹簧装置以及吊挂工装构成。当移动分系统运动时,引起吊索的摆动,通过串联在吊索中的力传感器测出吊索的张力变化,给出力控制机构中的电动缸的运动方向,改变平衡压缩弹簧的变形量,从而实现吊索的恒张力控制。当电动缸的伸出或收缩长度达到一定值时,收放吊索机构开始工作,收吊索或放吊索,完成吊索长度的调整[9-10]。恒张力控制吊挂装置如图8所示。
通过吊挂位姿跟踪子系统实现实时动态跟踪,该系统由桁车平台、7个二维跟随小滑台、吊挂伸缩调整装置以及转盘组成。

图7 移动分系地面低重力模拟状态图Fig.7 The ground simulation of low gravity for the mobile sub-system

图8 恒张力控制吊挂装置Fig.8 The hanging device for constant tension control
水平运动方向采用桁车与滑台调节组合。桁车平台采用纵向大车及横向小车组合模式,保证水平方向大范围运动的可达性。每个小滑台由x、y方向2组高精度直线驱动单元组成,作为小范围运动的跟随执行部件,实现快速精确的小范围调整。竖直运动方向采用电动缸和卷扬设备调节,其中电动缸满足快速调节要求,卷扬实现大范围的可调。转向通过安装在桁车系统下滑台上的转盘完成,转盘安装后满足±570°的转角要求。系统力与位置协调控制分2层:
1)实时控制。根据角度传感器的反馈信息,实时控制二维跟踪平台的伺服电机动作,调整吊索倾角,保证吊索处于铅垂方向。根据力传感器的反馈信息,恒张力控制杆和卷扬机动作,保证吊索张力满足控制要求。对于吊索角度和张力控制,要求实时性高,响应快。所以该层控制策略上处于最高级。
2)分时控制。根据吊点信息计算出吊点位置信息是否达到阈值,如果达到,纵向运行大车、横向运行小车运动,保证吊点运动在合适范围内;如果月面巡视器运动方向发生变化,通过转盘控制单元控制转盘作相应的转向,保证水平跟随平台的坐标系与巡视器坐标系平行[11]。
该1/6g低重力吊挂系统通过多点吊挂组合能实现位置激变后载荷的快速准确调整,能解决移动系统活动部件多、位置变化无规律的特点。
3.7 释放分离集成模拟技术
探测器和月球车分离时,探测器的着陆姿态对分离的难度有很大影响,如果着陆姿态倾斜小,则分离难度小;着陆姿态倾斜大,则月球车分离难度也随着倾斜角度的增大而增大。分离过程如图9所示。

图9 探测器和月球车分离过程Fig.9 The separation process of rover and probe
按照分离过程的要求,构建一套与移动分系统相匹配的着陆器姿态模拟平台,如图10所示。着陆器姿态模拟平台具有实现巡视器与着陆器释放过程、月面着陆后着陆器顶板和悬梯可能出现的各种姿态模拟功能,可用于移动分系统模拟与着陆器释放、转移、分离过程中各种功能性能测试。平台主体以“共心三轴承”机构为基础,选择上楔盘子系统和下楔盘子系统共同构成装置的角度调节部分。下楔盘和上楔盘具有相同的楔角(23°)。两者的相对转动,可以叠加得到0°~46°之间的任意角度,从而使顶板模块产生0°~46°之间的任意倾斜角度。即3个自由度“合成”所需的俯仰角和侧倾角,保证平台在大载荷大倾角状态下定位精度高,且角度连续可调[12]。

图10 着陆器姿态模拟平台图Fig.10 The attitude simulation platform for the lander
释放分离集成模拟系统解决了巡视器与着陆器在轨压紧、释放、转移、分离全过程中各种工况的地面模拟问题,实现了极限工况全覆盖下移动性能与机构能力,同时考核在轨状态实时快速跟踪复现与验证的效果。以“共心三轴承”技术为基础,采用3个自由度“合成”所需的x、y二自由度方法,解决了释放转移过程中着陆器顶板载荷大、姿态倾角大、角度调整要求连续快捷与顶板定姿精度要求高、地面模拟成本要求低等多组对立约束问题,达到了顶板大载荷下定姿精度高、顶板角度快速连续可调的效果,为两器分离模拟试验的开展提供更好方式。
3.8 月面移动功能与性能验证技术
对月面地形和着陆姿态进行分析,月球车需具备克服200 mm障碍、20°坡、最小转弯半径小于1.5 m、横向静态稳定性大于30°、纵向静态稳定性大于36°及最大速度大于200 m/h等能力。
采用多交集事件单轴验证方法,提出了一系列简便可行、准确有效的典型移动功能性能测试方案,构建了最小转向半径、最大移动速度、适应坡度、越障、过坑、加电与断电制动保持等功能与性能测试方案[13],明确了移动分系统参试产品状态、环境模拟方法、指标与试验测试参数对应关系等。
除在非结构地形地貌场地进行月球车各项性能摸底试验外,还基于综合建模、分析评估和结果分析技术(Probabilistic Risk Assessment,PRA),建立了一套移动分系统在轨工作可靠性试验及评估体系,包括组件可靠性试验及评估、各功能事件的试验及评估、系统综合试验及评估等方面,涉及事件树和故障树建模、贝叶斯网络建模、应力-强度分析、贝叶斯分析以及蒙特卡洛仿真分析等技术方法,建模示意见图11。

图11 基于事件链的任务过程综合建模示意图Fig.11 Comprehensive modeling of task process based on event chain
4 地面试验技术验证
在试验和评估体系形成的共同架构下,移动系统顺利通过地面评估,在轨按照各种规划路径,为月球车在轨探测提供了可靠的移动平台。
4.1 月球车在轨工作情况
玉兔2号月球车2019年1月3日与探测器顺利分离,抵达月面,进入月面工作阶段。在轨完成了移动系统的主要功能验证,包括月面着陆前阶段承载和生存功能,月面分离功能,支撑巡视器重量功能,前进、后退、制动等能力,在平面和坡上具有原地转向和行进间转向等多种转向能力,具有地形适应能力,包括坡、坑和障碍物等,具有纵向和横向稳定性,具有加电和断电保持巡视器静止的功能,适应月面环境,月昼期间正常工作,安全度过月夜后具有正常工作能力。
移动系统在轨典型工况中速度和电流的曲线如图12、图13所示,在轨工作数据表明,在轨运动的速度和电流等指标与地面试验情况保持一致,从而充分肯定了地面试验的有效性。
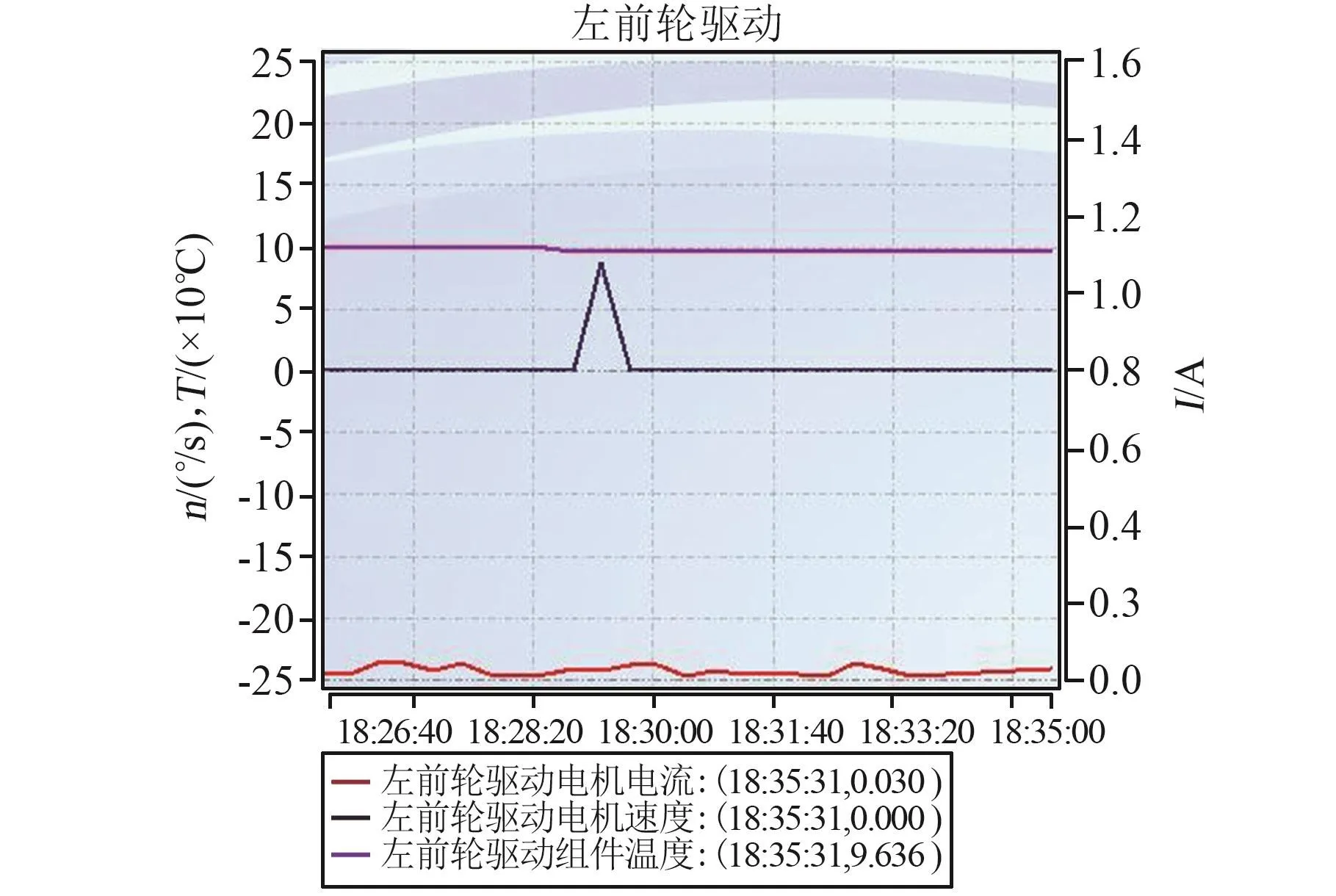
图12 在轨盲走驱动轮运动曲线Fig.12 The data curve of the driving wheel

图13 在轨转向驱动轮运动曲线Fig.13 The data curve of the steering wheel
从在轨避障相机拍摄的图片(图14)可看出,车轮在月面行驶时,月尘的吸附特性导致车轮表面很多区域都积满了月尘,从而推断活动部件附近,尤其是驱动机构附近也积满月尘,由此看出,密封件的防尘效果显著,进一步表明密封防尘试验方法的有效和准确。
移动系统按照路径规划结果,在轨直线行驶到位精度高、转向定位准确,为精确探测、寻找休眠点等关键事件的快速实现提供良好的基础。
至3月13日第3次休眠,经历了3个月昼和月夜,月球车完成3个月寿命期的在轨工作,累计移动距离达到163 m。目前移动系统各项参数正常,状态良好。月球车在月面行走轨迹图如图15所示。

图14 在轨车轮积满月尘Fig.14 The wheel full of lunar dust

图15 月球车月面移动轨迹图Fig.15 The trajectory of lunar rover on the moon
4.2 在轨数据与地面试验数据对比
巡视器在轨完成的主要工作为盲走和原地转向,从直线行驶能力、原地转向能力方面,将在轨数据和地面试验数据进行对比,对比结果如表3所示。

表3 在轨和地面试验数据对比Table 3 Comparison of on-orbit and ground test
对比结果表明,在轨的平均工作电流和平均移动功耗与地面基本保持一致,地面试验能作为移动分系统产品合格的评价标准。
5 结论
在月球车可靠性试验研究过程中,建立了能够适应345℃温差的深冷高低温试验系统,模拟月面温度环境;建立了活动部件密封圈试验系统,掌握高低温、扬尘环境下密封产品的试验方法;建立了月球车月面通过性试验和月面低重力模拟的月貌试验室,能准确评估移动系统的性能;研制了专门研究不同构型的车轮和月壤作用关系的轮壤测试设备,用于准确预测车轮的行驶性能;研制了释放分离设备,模拟月球车与探测器分离所有角度,全面模拟两器分离的所有工况。月球车在轨成功服役表明地面试验技术能作为其评价的手段,为其他深空探测移动平台的试验奠定基础,后续根据探测星球的土壤特点,还需进一步完善试验条件和评价体系。
猜你喜欢
军事文摘(2022年18期)2022-10-14
小哥白尼(趣味科学)(2022年6期)2022-08-17
青少年科技博览(中学版)(2021年11期)2021-03-07
数学大王·低年级(2021年2期)2021-02-21
北京航空航天大学学报(2020年10期)2020-11-14
百科知识(2019年5期)2019-03-18
汽车观察(2019年2期)2019-03-15
小猕猴智力画刊(2018年7期)2018-08-08
发明与创新·中学生(2016年7期)2016-05-14
中学科技(2015年7期)2015-07-03